
高速铁路CPO解算及Bernese GPS不同解算策略精度分析
2012-12-11 06:07梁永
测绘通报 2012年1期
梁 永
(铁道第三勘察设计院集团有限公司,天津300251)
一、高速铁路框架控制网CPO测量要求
高速铁路工程测量规范有关CPO控制网规定:考虑CPI控制网各阶段复测成果比较,结合CPO控制网选点、布网、野外测量等综合因素,规定每50 km建造一座CPO。
1.外业观测要求
使用标称精度不低于5mm +1ppm的双频GPS接收机,同步观测不少于4台,GPS观测时段数大于4,有效时段长度大于300min。
2.基线解算要求
CPO基线解算采用精密星历且使用适合长基线的高精度GPS解算软件(GAMIT、BERNESE等)进行解算,解算模式采用多基线解算模式;顾及对流层、电离层折射延迟对高程测量精度的影响,最大限度减少折射引起的向量偏差。
多基线解采用的是严密平差模型,不会产生同步环坐标闭合差问题,其结果更为准确可靠。一次提取一个观测时段中所有进行同步观测的n台接收机所采集的同步观测数据,在一个时段解算过程中共同解求出所有n-1条相互独立的基线。
基线向量估值

式中

基线向量估值的方差-协方差阵

式中,
该解算模式特点是数学模型严密,能反映出同步观测基线间的统计相关性,但数学模型和解算过程比较复杂,计算量较大,适用于对质量要求较严格的工程应用。
3.解算结果要求
解算结果满足相邻点相对中误差小于20 mm、最弱边相对中误差小于1/2 000 000。
二、Bernese 5.0软件主要操作步骤
1.数据文件准备
原始观测文件、精密轨道文件、常用文件(GEN)、测站坐标、测站信息文件等准备。
2.输入观测数据文件
将观测数据RINEX格式转换为Bernese二进制格式。经转换后,观测值文件转换成Bernese格式4种格式文件,分别为:*.PZH(相位非差头文件)、*.PZO(相位非差观测文件)、*.CZH(码非差头文件)、*.CZO(码非差观测文件)。
3.生成轨道数据文件
首先将IGS标准格式的地球自转文件(文件扩展名为IEP)转换为Bernese EOP格式文件(文件扩展名为ERP);然后将精密星历转化生成生成轨道列表文件(文件扩展名为TEB),同时生成卫星钟差文件;再利用轨道列表文件生成标准轨道文件(文件扩展名为STD)。
4.数据预处理
1)使用非差码观测值进行接收机钟差改正。
2)组成基线,Bernese软件可以自定义基线,也可由软件根据一定原则自动生成单差基线,且基线相互独立,自动生成单差基线原则有:
OBS-MAX 以构成的单差观测值数量最多为原则;
SHORTEST 以构成的单差基线距离最短为原则;
STAR 选定一个点作为中线点,其他点与这个点构成星形网;
DEFINED 预先自定义好的基线。
3)利用三差解进行周跳探测和修复。
4)通过参数估计,剔除粗差观测值。
5.基线解算
1)求浮点解。
2)确定整周模糊度。整周模糊度确定的方法软件提供的方法有 QIF(quasi ionosphere free)、SIGMA、SEACH、Round。但适合于长基线的解算方法只有QIF、SIGMA两种。
3)求基线最终解。
三、实例分析
1.结合某项目框架网CPO进行讨论
该项目共有12个CPO点,联测IGS站点2个(BJFS、SHAO),其网形图如下。
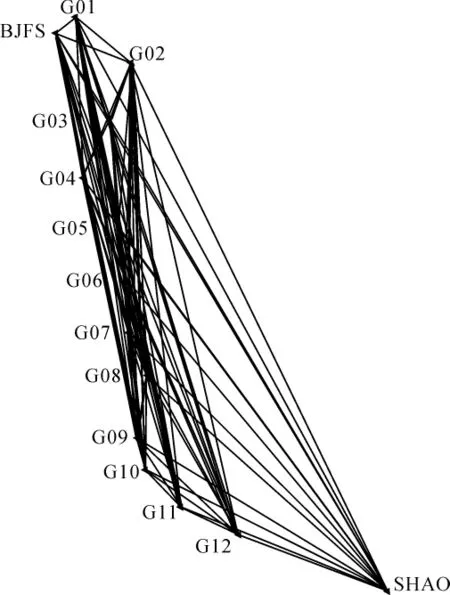
图1 框架网CPO网形图
2.不同方法解算数据分析
方法1:基线选择采用OBS-MAX方式(基线选择以构成的单差观测值数量最多为原则),观测值采用Inon-Free L3,对于长基线解算时有很好的效果,不需要进行电离层模型改正。确定整周模糊度方法采用QIF,将整周模糊度N1、N2一次确定出来,其对流层延迟采用模型进行估计。同时该框架网CP0也采用GAMIT软件进行了解算,其坐标成果比较见表1。其观测值及观测值方程如下。
Inon-Free线性组合

对应的双差观测方程

方法2:基线选择采用事先自定义DEFINED方式(基线选择是按照线路方向相邻点进行连接,同时满足基线距离最短必选的原则,即SHORTEST选择基线方式),观测值采用Inon-Free L3,确定整周模糊度方法采用QIF,将整周模糊度N1、N2一次确定出来,对流层延迟采用模型进行估计。具体坐标成果比较见表2。
方法3:基线选择采用事先自定义DEFINED方式,观测值采用Widelane(L5),确定整周模糊度方法采用SIGMA法。首先采用L5进行宽巷模糊度NW确定,然后采用L3观测值并引入宽巷模糊度确定窄巷模糊度NL,对流层延迟采用模型进行估计。具体坐标成果比较见表3。其观测值及观测值方程如下。
Widelane线性组合

L5双差观测方程

L3双差观测方程

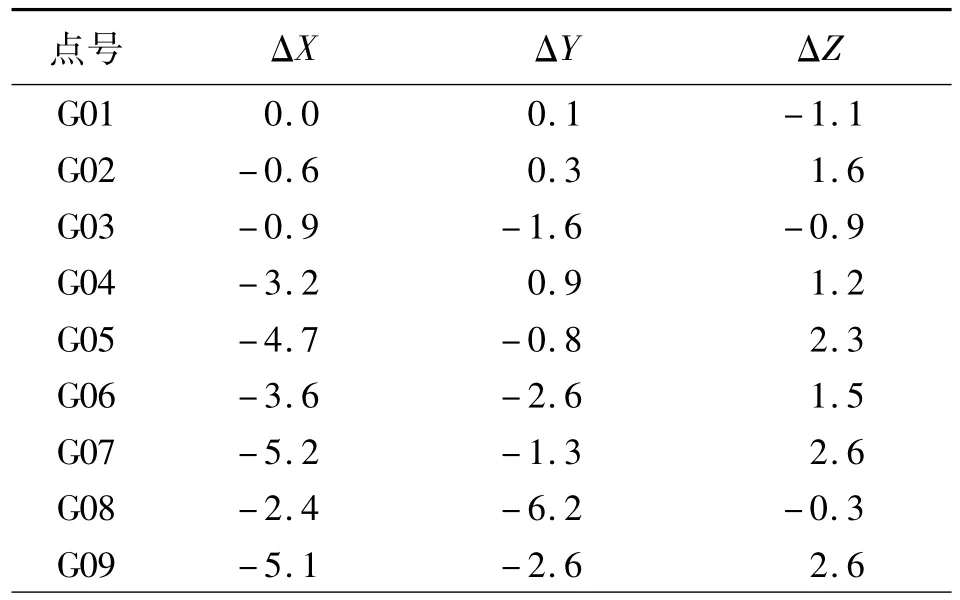
表1 方法1Bernese计算结果与GAM IT计算结果比较mm
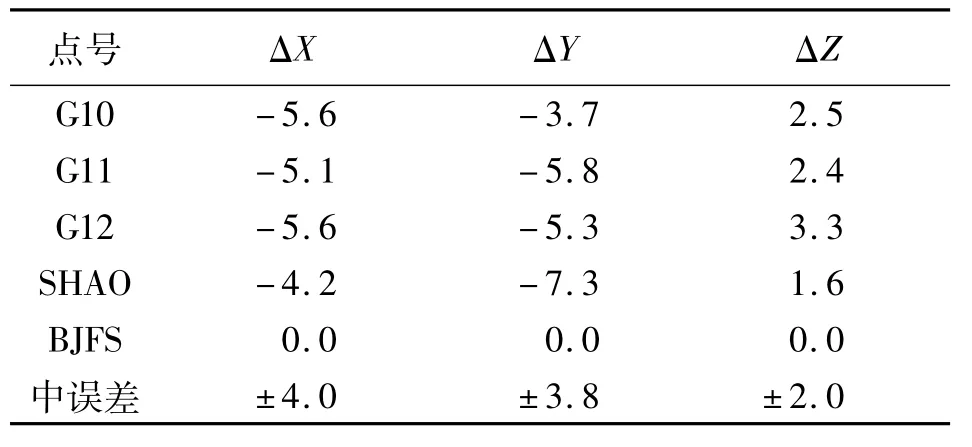
续表1 mm
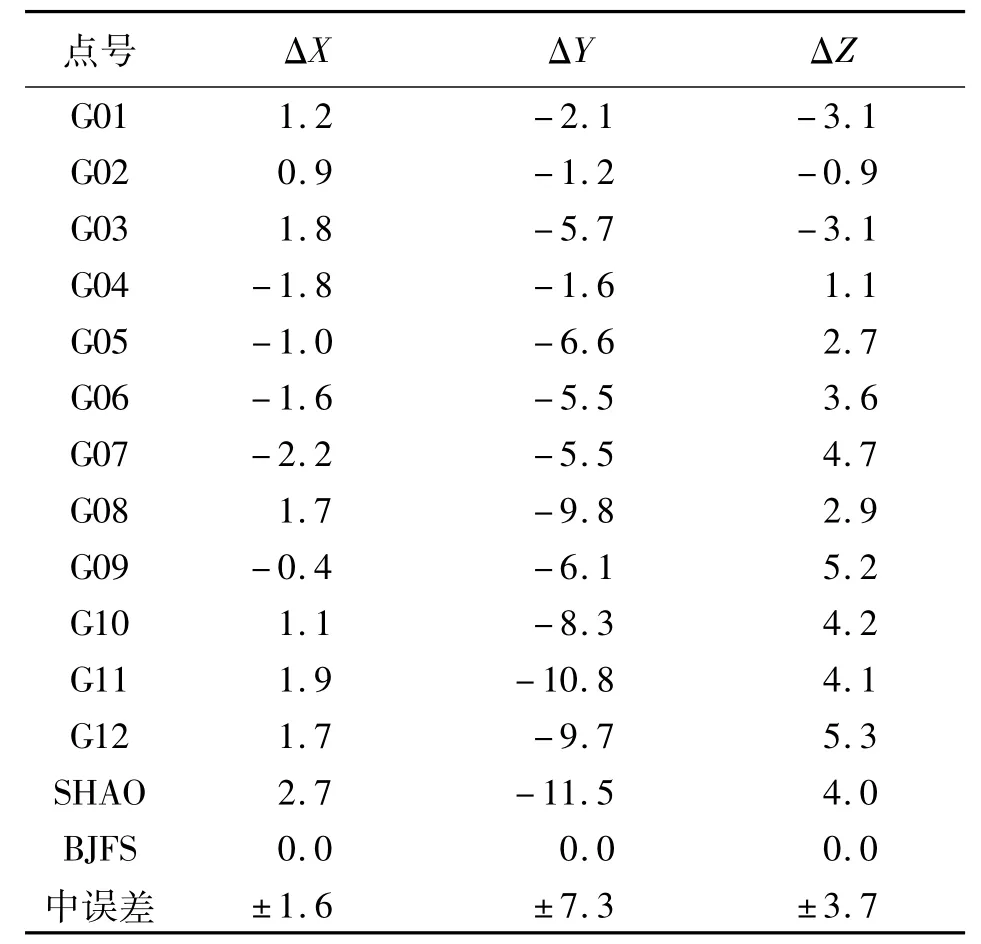
表2 方法2 Bernese计算结果与GAM IT计算结果比较mm

表3 方法3 Bernese计算结果与GAM IT计算结果比较mm
从表1和表2对比分析看出,在独立基线选择方式不一样的情况下,采用的观测值组合和确定模糊度的方法相同,其计算结果是不一样的。方法1解算结果精度优于方法2计算结果精度;采用OBSMAX选择基线的方法比自定义(或SHORTEST)等计算的效果要好,且在X、Y、Z 3个方向的坐标较差相对较均匀,其原因是OBS-MAX以构成的单差观测值数量最多为原则进行基线选取,其观测值比其他SHORTEST、STAR、DEFINED任何方式的同步观测值要多。
从表2和表3对比分析看出,独立基线挑选的方式一样,采用观测值组合和确定模糊度的方法不同,从标准差看出,方法2、3计算的结果基本一样,两种方法解算的坐标成果,且坐标差均在1mm以内。
采用QIF、SIGMA法进行模糊度确定时,其最终解算结果基本一样,但采用QIF法较为方便,其效率高、速度快。因采用QIF法解算基线时确定模糊度只需计算一次,而SIGMA法则确定模糊度需单独计算两次。
四、结束语
1)Bernese GPS解算精度与基线选择方法有关。一般情况下,没有特殊情况建议选择 OBSMAX选择基线的方法进行,解算效果要比其他方式好。
2)Bernese GPS解算在独立基线选择方式一样的情况下,采用不同的观测值、不同的模糊度确定方法进行长基线解算,QIF和SIGMA的效果基本一样,对解算结果没有大的差别。
3)采用相位观测值进行GPS长基线模糊度确定时,最好采用QIF法,该方法解算较为方便,比SIGMA法解算速度快、效率高。
[1]中华人民共和国铁道部.高速铁路工程测量规范TB10601—2009[S].北京:中国铁道出版社,2009.
[2]黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2003.
[3]李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009.
[4]DACH R,FRIDEZ P,HUGENTOBLER U.Bernese GPS Software Version 5.0 Tutorial[R].Bern:Astronomical Institute/University of Bern,2004.
[5]HUGENTOBLER U,DACH R,FRIDEZ P,et al.Bernese GPSSoftware Version 5.0 DRAFT[R].Bern:Astronomical Institute/University of Bern,2006.
猜你喜欢
科学(2020年5期)2020-11-26
甘肃科技(2020年20期)2020-04-13
中国惯性技术学报(2019年3期)2019-10-15
中国化妆品(2017年12期)2017-06-27
小天使·三年级语数英综合(2017年6期)2017-06-07
测绘科学与工程(2017年1期)2017-05-04
舰船电子对抗(2016年5期)2016-12-13
太空探索(2016年7期)2016-07-10
太空探索(2015年8期)2015-07-18
火炸药学报(2014年3期)2014-03-20
