无线传感器网络移动信标节点路径优化策略*
2012-12-07 06:55:12沈艳霞薛小松
传感器与微系统 2012年12期
沈艳霞,薛小松
(江南大学物联网工程学院电气自动化研究所,江苏无锡214122)
0 引言
无线传感器网络(WSNs)定位技术是传感器网络中关键技术,已经成为目前WSNs研究的一大热点[1]。目前,常用的定位算法主要分为两大类:基于信标节点和非基于信标节点的WSNs节点定位算法。信标节点就是可以预先获取自身位置的节点,通常采用在节点上安装GPS系统或事先人工布置的方法。非基于信标节点的节点定位算法只得到WSNs节点的相对位置,WSNs的应用受到很大的限制;基于信标节点的定位算法用信标节点定位剩余节点。信标节点包括固定和移动2种,固定信标节点定位方法常采用测量距离、相对角度、传播时间差及传播时间等进行节点定位[2],参与定位的固定信标节点越多,定位精度越高。定位工作完成后,信标节点将转成普通的传感器节点使用。由于信标节点成本远远高于普通节点,因此,信标节点越多,布设整个网络的成本越高,过多的信标节点将会造成较大的浪费。为了降低使用成本,利用移动信标节点辅助其他节点定位是一种比较实用的方法[3~5],信标节点在监测区域内按规划的路径移动,通过最优的路径规划,完成对未知节点的覆盖。信标节点路径规划又分为静态路径规划和动态路径规划2种。静态路径规划不考虑节点的分布情况,只是按照预先规划好的路径进行移动,当未知节点靠近路径时定位精度高,反之,定位精度低,甚至无法定位。文献[6]中提出的S型路径规划方法,文献[7]中移动节点以2次垂直轨迹进入未知节点通信区域等都属于静态路径规划。文献[8~10]提出的方法属于动态路径规划,文献[8]使用高斯—马尔可夫移动模型(GMM),通过参数控制节点运动速度和方向的变化幅度,但是移动轨迹会在某些区域重复出现,造成通信浪费。文献[9]使用源于布朗运动的随机移动模型,节点前后时间内运行方向变化很大,容易出现急转弯现象,文献[10]中禁忌搜索路径规划,使用记忆存储来指导搜索的过程。
本文在GMM规划移动路径的基础上,提出了对移动路径的优化策略,使得信标节点更均匀地在待测区域移动,快速完成对整个监测区域内所有未知节点的覆盖。
1 信标节点移动路径规划
本文考虑将信标节点装备在无人驾驶的遥控汽车或者机器人上,从而使信标节点具有移动功能。信标节点移动过程中,以一定的通信半径向四周广播自身位置信息,其通信范围内的未知节点接收到信标节点发送的信息,则能完成对未知节点的覆盖,其示意图如图1所示(50 m×50 m区域)。
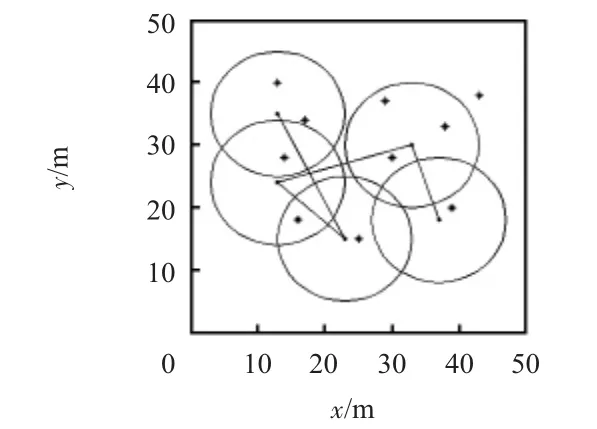
图1 节点覆盖示意图Fig 1 Diagram of node coverage
文献[8]提出的GMM定义如下

式中 vk,dk分别为移动过程中第k个时间间隔t开始时的速度和方向,dk以正北方向为90°作参考。vmean,dmean分别为初始速度和初始运动方向,是常量。γv,γd为满足高斯分布的随机变量,α为信标节点的随机度调节参数。移动开始时,赋予信标节点初始方向和初始速度,固定时间间隔后,移动信标节点更新当前速度和方向。信标节点在第k个时间间隔开始时的位置定义如下

其中,(xk,yk)为信标节点运动到第k个时间间隔开始时的坐标。从文献[8]中仿真结果发现,移动轨迹会在某些区域重复出现,造成通信浪费,降低信标节点的使用效率。
为了使信标节点能均匀分布在整个监测区域,对移动路径进行如下优化,流程如图2。
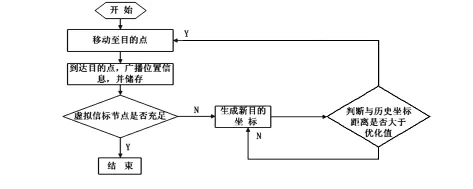
图2 路径优化流程Fig 2 Process of path optimization
2 数据仿真
2.1 仿真实验
仿真待测区域为100 m×100 m的正方形区域。随机部署100个未知传感器节点,移动信标节点初始位置(50,46m),设置信标节点通信半径10 m,优化距离3 m(信标节点之间距离不小于3 m),信标节点每移动2 s便停止1 s用来广播信息。GMM参数:初速度 vmean=2 m/s,初始方向dmean=90°,随机度调度因子 α =0.6,噪声参数 γv,γd均服从高斯随机分布。
设定信标节点移动500次进行仿真,如图3为优化前后100 m×100 m区域内信标节点移动轨迹与位置分布图,对比优化前后可以看出:优化后信标节点分布均匀,更好地覆盖整个监测区域。图4监测区域内随机布撒了100个未知节点,可以看出:应用优化后的移动方法所有传感器节点周围都有信标节点对其进行覆盖,不再存在盲点。
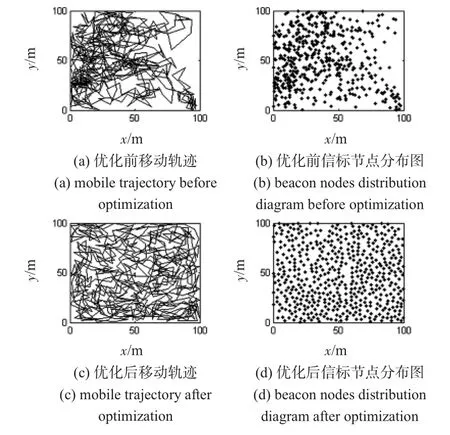
图3 优化前后信标节点轨迹和位置分布图Fig 3 Trajectory and position distribution diagram of beacon nodes before and after optimization
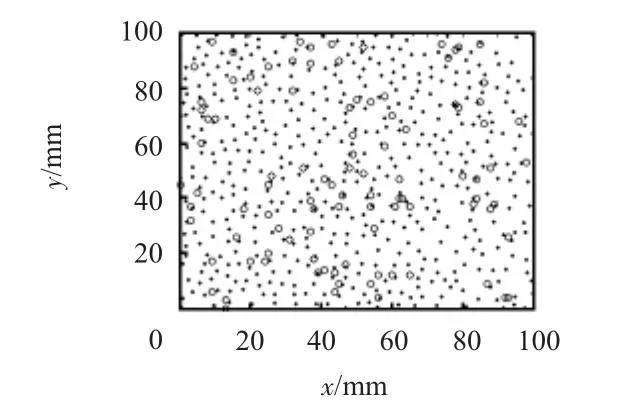
图4 信标节点对未知节点覆盖图Fig 4 Diagram of unknown nodes covered by beacon nodes
2.2 覆盖率影响因素
1)虚拟信标节点数量对覆盖率的影响
保持其他参数不变,改变移动时间得到不同数量的虚拟信标节点。图5显示,优化前100个信标节点覆盖率在60%左右,优化后覆盖率提高了10%,当信标节点移动500次(500个虚拟信标节点)覆盖率便能达到100%,仿真结果表明:优化后的移动路径能保证信标节点快速对区域内的所有未知节点进行覆盖,达到实际应用中快速定位的要求。
2)不同优化距离对覆盖率的影响
增加优化距离能使虚拟信标节点更分散,分布更均匀。设定信标节点移动200次,改变优化距离进行仿真。图6中优化距离为0表示未对移动路径进行优化,随着优化距离的增加,覆盖率得到显著提高。
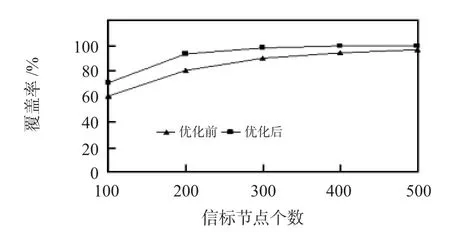
图5 虚拟信标节点数量对覆盖率的影响Fig 5 Effect of number of virtual beacon nodes on coverage rate
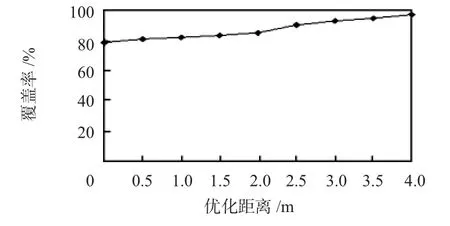
图6 优化距离对覆盖率的影响Fig 6 Effect of optimization distance on coverage rate
3)γv对覆盖率的影响
由文献[8]的仿真结果可知,覆盖率受节点移动速度的影响,公式(1)中可以看出,移动速度由γv分布决定。改变γv平均值可以改变γv的分布,从而影响信标节点的移动速度,以得到γv对覆盖率的影响。对200个速度进行仿真,图7显示γv均值增加,节点移动速度变快且速度变化范围变得相对稳定,图8对优化前后γv对覆盖率的影响进行统计,可知γv越大节点移动速度越快,覆盖率越高。
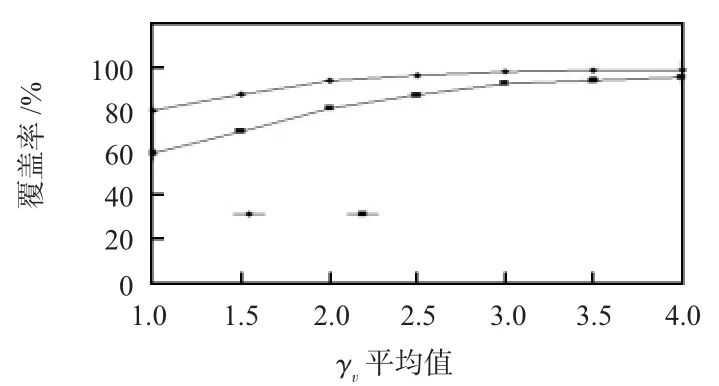
图8 γv均值对覆盖率的影响Fig 8 Effect ofγv average value on coverage rate
3 结束语
由于传统信标节点成本高,本文基于移动信标节点,在应用GMM移动模型规划移动信标节点路径的基础上,提出对移动轨迹进行优化,以此提高信标节点对未知节点的覆盖率,用于辅助定位。由仿真结果可知,此方法能得到更多均匀分布在被测区域的虚拟信标节点。通过分析不同参数对覆盖率的影响,为实际应用中根据不同应用需求选取最优参数提供有益的参考。
[1]Ikegami Tetsushi.An overview of the sensor networks[J].IEEJ Transactions on Electronics,Information and Systems,2008,128(10):1498-1503.
[2]丁 辉,李波勇,艾述亮,等.基于移动信标的无线传感器网络节点定位技术综述[J].电脑知识与技术,2011,21(7):5080-5082,5086.
[3]Ssu K F,Ou C H,Jiau H C.Localization with mobile anchor points in wireless sensor networks[J].IEEE Trans on Veh Technol,2005,54(3):1187-1197.
[4]Liao W H,Lee Y C,Kedia S P.Mobile anchor assisted node localization for wireless sensor networks[J].IET Commun,2011,5(7):914-921.
[6]鲍可进,王 伟.一种单移动锚节点的无线传感器网络定位算法[J].计算机应用研究,2010,27(4):1452-1454.
[7]梁 涛,陈 雄,孔庆生,等.移动节点路径规划和几何限制的无线传感器网络定位算法[J].信息与控制,2011,40(5):577-582.
[8]陈 娟,李长庚,宁新鲜,等.基于移动信标的无线传感器网络节点定位[J].传感技术学报,2009,22(1):121-125.
[9]王 兵,严斌宇,袁道华,等.Ad Hoc节点移动性模型特点初探[J].四川大学学报:自然科学版,2005,42(1):68-72.
[10]梁甲金.基于移动锚节点的无线传感器网络定位技术研究[D].成都:西南交通大学,2010.
猜你喜欢
今日农业(2022年15期)2022-09-20 06:54:16
今日农业(2021年21期)2021-11-26 05:07:00
导航定位与授时(2020年5期)2020-09-23 03:05:00
铁道通信信号(2020年9期)2020-02-06 09:16:06
铁道通信信号(2018年3期)2018-04-19 02:32:56
知识经济·中国直销(2018年3期)2018-04-12 06:43:37
西南交通大学学报(2016年6期)2016-05-04 04:13:05
长春理工大学学报(自然科学版)(2015年4期)2015-12-07 06:57:06
学习月刊(2015年1期)2015-07-11 01:51:12
水道港口(2015年1期)2015-02-06 01:25:45