WSNs中移动物体监测的覆盖控制技术研究*
2012-12-07 06:55:10何加铭谢志军曾兴斌
传感器与微系统 2012年12期
徐 萍,何加铭,谢志军,曾兴斌
(宁波大学信息科学与工程学院,浙江宁波315211)
0 引言
在构建无线传感器网络(wireless sensor networks,WSNs)时,覆盖问题是衡量网络的QoS指标之一,可以看作是传感网络在节点能量、计算处理能力等资源受限的情况下,通过放置节点和唤醒/休眠节点等手段,从而获得更好的QoS。传感器节点构成的WSNs在无人监管的情况下,通过传感器节点之间的协同工作实现监测和采集各种环境或监测对象的相关信息,并将处理后的数据传送给基站。除此之外,WSNs中通常节点布设密集,如果让所有节点都工作,则会在数据收集时存在高度相关和冗余,甚至在传送数据时发生冲突。移动目标监测是WSNs的重要应用之一[1]。
一种典型的移动目标监测的调度策略是基于分簇策略的跟踪算法[2,3]。假设WSNs是由特定或者随机部署在监测区域内的簇首和普通节点组成,簇首负责接收处理节点发来的数据,然后转发给基站;普通节点负责感知数据。然而活跃节点数直接影响网络能量的消耗。文献[4]提出基于自适应目标跟踪算法,利用最优选择机制和动态分簇方式确定活跃节点。文献[5]最大熵原理,先把部署在网络中的静态节点分簇,然后根据监测环境的需要加入移动节点,从而降低网络的不确定性,增加节点的可选择性。文献[6]利用节点的联合概率探测模型,选择探测概率大的节点作为任务节点。然而当目标在局部做重复运动,或者更为复杂的运动时,目标在局部区域内逗留的时间很长,这样局部能量就会迅速消耗,最终导致对目标漏检。
本文根据以往节点的调度记录和剩余能量、目标轨迹以及回退机制来提高网络覆盖度和监测概率,借助贪心算法优化网络资源分配,使之更好地完成对移动目标的监测任务。在WSNs中,大量节点随机分布在目标区域内,受节点自身条件限制,若所有节点同时工作,不仅能量消耗过快,而且降低了网络的使用寿命。本文研究如何通过模糊移动轨迹[7]策略解决唤醒调度算法中某些节点过早死亡和移动物体监测过程中盲点问题。主要研究包括:构建基于随机均匀分布节点模型,提出模糊移动轨迹建立方案,提出一种基于模糊移动轨迹策略的节点调度(move trajectory PEAS,M-PEAS)算法。实验证明:该算法提高了节点的监测概率,降低了能耗。
1 M-PEAS理论基础
采用轮换“活跃”和“休眠”节点的覆盖控制协议可以有效延长网络生存时间,每个周期由一个自调度阶段和一个工作阶段组成。在自调度阶段:各节点首先向传感半径内邻居节点广播通告消息,其中包括节点ID和位置。节点检查自身传感任务是否可由邻居节点完成,可替代的节点返回一条状态通告消息,之后进入“休眠状态”,需要继续工作的节点执行传感任务,在判断节点是否可以休眠时,如果相邻节点同时检查到自身的传感任务可由对方完成并同时进入“休眠状态”,就会出现监测的“盲点”[8]。
1)监测概率
一般由于传感器节点的理论或物理特性不同,应用场景对监测要求不同,对监测性能要求不同。根据传感模型得到监测概率的分布,不同传感器的传感模型有所差异,但感知能力随距离的增长而降低的这一基本特点是保持不变的。PEAS算法节点密度公式

其中,λ为节点的监测概率,ts为节点睡眠周期。传感器节点s在q点的感知模型定义如下[9]
其中,dis(s,q)为节点s与q在二维空间上的欧氏距离,α>0为感知系数,k=1,2为距离影响系数。根据感应模型,可以得出节点s对q点的发现概率p(d)
其中,d=dis(s,q),r为感知半径,R 为通信半径,为保证节点间正常通信,设定R>2r。
2)模糊轨迹
设移动目标物体从节点A移动到节点B的坐标分别为A(x1,y1),B(x2,y2),根据两节点之间的欧氏距离和监测时间,得出移动目标的速度函数

方位角函数

其中,φab为A至B直线方向参考方向。当运动物体从节点A移至节点B时,节点B计算速度估计函数f(vB)和方位角估计函数f(Bφ)定义如下

其中,Δv,Δθ为速度和方位角的偏差量。
3)回退机制
节点在自调度阶段检查之前执行一个回退机制:每个节点在一个随机产生的Td时间之后再开始检查工作。在本文中Td时间根据物体移动轨迹、速度、节点间距离决定。此外,回退时间还可以根据周围节点密度而计算,这样就可以有效地控制网络“活跃”节点的密度,为了进一步避免“盲点”的出现,每个节点在进入“休眠状态”之前还将等待3 s时间来监听邻居节点的状态更新。
4)模糊移动轨迹的优劣评价标准
模糊移动轨迹的优劣评价标准:移动目标在运动的情况下,在传感区域内的时间越长,被监测到的概率越大,对于目标在监测区域内监测量的计算,移动目标在监测区域内的责任感知节点有影响,第一,移动目标在区间[t1,t2]在二维轨迹上监测量[10]为
式(7)表示目标移动过程中责任节点对其感知数量,即监测量越大越好。模糊轨迹监测的长度与节点监测状态有关;第二,目标在移动过程中被监测的概率越大,漏检的可能性减少。同时唤醒机制综合考虑剩余能量,当节点剩余能量为初始能量的1/3时,节点自动转换成中继节点,只负责节点信息的传递工作,减少因节点失效而产生的盲点问题。
2 M-PEAS节点调度策略
M-PEAS节点调度策略是一种基于探测的节点密度控制协议PEAS的分布式控制算法,其中,运动物体模糊移动轨迹、速度和方位角函数推算是此算法的关键。节点调度休眠规则包括2个方面:首先,检查节点在各自责任区是否满足保证区域覆盖;其次,根据估计值设定节点唤醒函数。
1)模型的分解
运动物体从节点A运动至节点C,而B,D,E,F是其邻居节点,如图1所示,各节点具有相同的属性,节点C根据节点A获取物体移动的速度、方位角、距离等信息推算运动物体本轮的轨迹,计算到达自身监测区域概率和时间。由于各节点具有相同的时钟,同时物体的运动具有很强的关联性,在短时间内其速度和方向不会发生太大的变化。节点C根据节点A的信息和两点间的距离,确定速度估计函数F(v),方位角函数φ(θ),如图2所示,定义与参考方向x轴方向的夹角为方位角。通过这2个函数推算物体的运动轨迹y,休眠节点根据信息确定到达本区域的概率,将此信息发送给邻居节点,通过比对接收到的信息分析数据。关联度最小的节点采用休眠方式;若有几个节点同时处于方位角之内,且监测区域有重叠,根据节点的覆盖范围和节点的剩余能量综合考虑节点的工作状态。通常,设物体从节点A运动到节点B,根据RSSI技术获得两点的距离,估计速度函数计算物体到达上限时间令T为PEAS休眠节点唤醒周期,则,当节点C收到节点A的感知信号,经过mT时间,节点C进入节点监听状态,并持续(m-n)T时间。
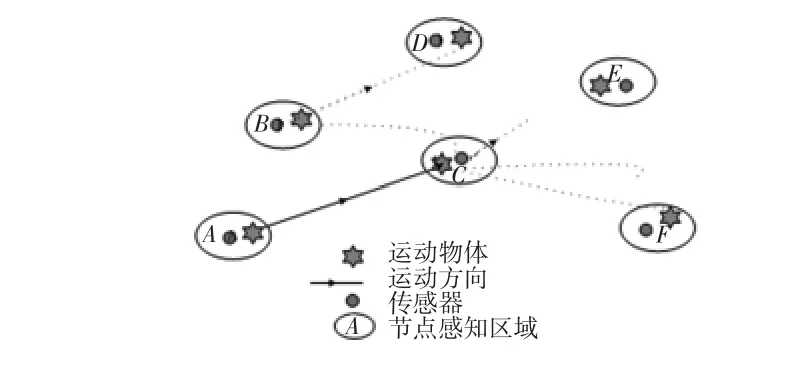
图1 目标物体移动原理图Fig 1 Mobile principle diagram of the target object
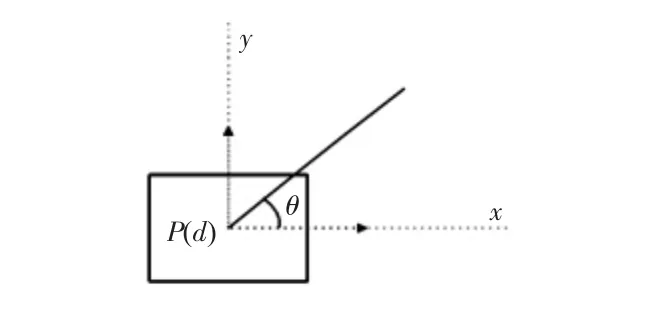
图2 移动目标方位角示意图Fig 2 Azimuth diagram of moving target
若多个目标同时进入节点监测区域,建立分时隙侦听,避免过多节点数据冗余,减少节点能量消耗。
2)模糊移动轨迹分析
在传感区域S内,起始节点Pt的坐标为(0,0),已知终点S,节点A首先监测到移动目标O,记录其到达时间t1,根据式(5)、式(6)得出速度和方位角函数。已知邻居节点位置信息,邻居节点收到B发送的监测信息,计算物体到达本监测区域的时间和概率P(b)=P(d)×(1+p),其中,p是根据模糊移动轨迹估算的预测概率[11]。同时将处理后的信息反馈给周边邻居节点,邻居节点接收到处理信息后通过比对自身监测区域的概率、剩余能量、目前状态,决定自身的状态(休眠状态、监听状态、加强监听状态)。为防止出现节点同时进入休眠状态而出现的盲点问题,本策略采用节点回退机制,回退时间0~t,根据移动目标与节点本身距离而定,设定t等于距离,B,C,F 节点进入覆盖探测状态的时间不同,避免了监测重叠区域出现覆盖漏洞的现象。
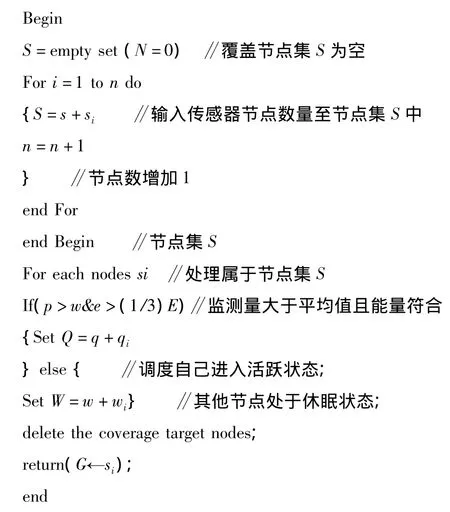
3)算法描述
输入传感器节点集 S={s1,s2,s3,…,sn},目标监测区域 A,移动物体目标集 L={l1,l2,l3…,lm},监听节点集 Q={q1,q2,q3…,ql},休眠节点集 W={w1,w2,w3…,wn-l},输出实现节点之间覆盖监测区域责任节点集G。
3 节点监测覆盖性能分析
设WSNs的节点随机均匀分布,节点密度服从式(1)分布,节点的感知半径为r,物体在网络内的运动路径长度为L,责任节点的感知概率为Ps(i),物体经过的责任节点数为N=(2rL+πr2)f(ts),被责任节点感知的节点数目,则漏检概率为,采用模糊移动轨迹策略,责任节点i对目标的监测感知数:
1)当物体恰好在监听加强状态时进入感知区域,节点对物体采用加强监听(此时的感知概率记为Pes)。
2)采用轨迹分析进行检测,设节点对物体加强监听的概率为Pe,物体被节点感知的数量满足

由式(8)可知,若Nes>Ns,即采用模糊移动轨迹策略失真率小于PEAS算法。
4 仿真实验
为了验证本算法的正确性和有效性,初始仿真场景和,下限 t2=相关参数设定如下:选用Matlab作为实验仿真平台,初始仿真场景与相关参数设定如下:平面100 m×100 m,1 000个节点随机分布,r=5 m,R=15 m,λ =1,k=1,节点初始能量0.5 J,移动目标速度 v=1 m/s。
仿真1:比较同一场景下,M-PEAS,PEAS算法在网络运行期间剩余能量变化。
由于M-PEAS算法通过轨迹、节点剩余能量设计调度函数,节点能耗更加均衡。从图3中可以看出:M-PEAS和PEAS算法在网络正常运行的不同时间段的剩余能量百分比。节点能量随着时间不断地消耗,当时间为130 s时,PEAS算法能量由于某些节点持续工作导致节点失效,整体能量消耗过大,已经小于整体能量的1/3,没有很好地考虑能耗的均衡性,导致整个网络过早处于瘫痪状态,造成很大的能量浪费。
仿真2:选取同上的仿真平台,分别选取节点数100,200,300,400,500,600,700,800,900,1 000 等 10 组数据进行100次仿真分析比对,其他参数保持一致。结果如图4所示。从中可以看出:在不同节点数覆盖情况下,M-PEAS算法监测概率高于PEAS算法,其原因是,WSNs节点在工作期间会出现一部分失效节点,随着节点工作变化,PEAS算法中的失效节点远大于M-PEAS算法,同时,采用轨迹分析策略,责任节点对物体的监测概率加强。所以,在具有相同的节点数时,M-PEAS的监测概率大于PEAS。
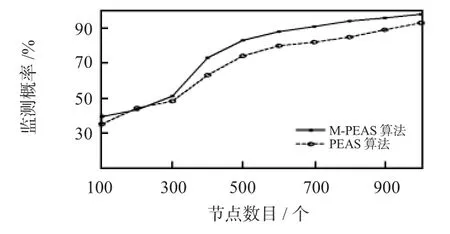
图4 监测概率对比图Fig 4 Comparison diagram of monitoring probability
5 结束语
在WSNs中,节点覆盖已成为WSNs研究的一个重要分支。考虑到节点自身能量有限,目标运动的复杂性和随机部署的不确定性,在本文中提出一种基于PEAS模糊移动轨迹算法。首先,提出了模糊移动轨迹策略,构建轨迹算法,将节点调度问题转化成轨迹生成问题;然后,基于模糊移动轨迹建立节点调度函数,仿真实验表明:此调度算法能很好解决节点能耗均衡问题;最后,利用贪婪算法关联其自身剩余能量对策略进行优化,证明该算法优于PEAS算法,提高了网络的监测概率,降低了节点漏检问题,延长了网络生命周期。
[1]Gezici S,Tian Z,Giannakis G,et al.Localization via ultra-wideband radios:A look at positioning aspects for future sensor networks[J].IEEE Signal Processing Magazine,2005,22(4):70-84.
[2]Chen W P,Hou JC,Liu S.Dynamic clustering for acoustic target tracking in wireless sensor networks[J].IEEE Transactions on Mobile Computing,2004,3(3):258-271.
[3]Chuang SC.Survey on target tracking in wireless sensor networks[R].Beijing:Tsinghua University,2005.
[4]Phuong P,Sesh C.Stability and performance of wireless sensor networks during the tracking of dynamic targets[J].Lecture Notes in Electrical Engineering,2011,89:349-362.
[5]Kuang X H,Feng R,Shao H H.A lightweight target tracking scheme using wireless sensor networks[J].Measurement Science and Technology,2008,19:1-7.
[6]Wang X,Ma JJ,Wang S,et al.Distributed energy optimization for target tracking in wireless sensor networks[J].IEEE Transactions on Mobile Computing,2009,9(1):73-86.
[7]Chen A,Kumar S,Lai TH.Local barrier coverage in wireless sensor networks[J].IEEE Trans on Mobile Computing,2010,9(4):491-504.
[8]Adlakha S,Srivastava M.Critical density thresholds for coverage in wireless sensor networks[C]∥Proc of IEEE WCNC’2003,New Orleans,La,USA,2003:1615-1620.
[9]Zhang W Z,Li M L,Wu M Y.An algorithm for target traversing based on local voronoi diagram[J].Journal of Software,2007,18(5):1246-1253.
[10]Saipulla A,Westphal C,Liu B,et al.Barrier caverage of linebased deployed wireless sensor networks[C]∥Proc of the 28th IEEE Conf on Computer Communications,INFOCON 2009,Rio de Janeiro,2009:19-25.
[11]Wang B,Chua K C,Wang W,et al.Worst and best information exposure paths in wireless sensor networks[C]∥International Conference on Mobile Ad Hoc and Sensor Networks,MSN’05,2005:52-62.
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05 06:49:10
中学生数理化·中考版(2021年6期)2021-11-22 07:52:30
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
中学生数理化·高一版(2020年1期)2020-02-20 13:24:32
中学生数理化·八年级物理人教版(2018年10期)2018-12-06 09:33:16
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29