往复潜油电泵控制系统研究
2012-12-05 02:41朱拾东张建军师俊峰赵瑞东
石油矿场机械 2012年5期
朱拾东,张建军,师俊峰,刘 猛,赵瑞东,舒 勇
(中国石油 勘探开发研究院,北京 100083)①
直线电机抽油泵直接利用直线电机的直线往复运动带动抽油杆上下运动,举升井下原油,其结构简单,质量轻,系统效率高,节能效果显著[1-4]。由于直线感应电机直接驱动柱塞泵工作,电机长期运行于井下狭小空间,直线电机尺寸及排量受到限制,冲程长,冲次低,需要对抽油泵进行调参,在直线电机运动的两极点需要快速响应。为了实现抽油机的快速调参和快速换向,有必要对直线电机控制系统进行研究。
1 电机结构
直线潜油电泵举升技术主要包括直线潜油电机、井下泵和地面控制系统3部分。
直线潜油电机由普通平式油管下到设计泵深,地面电源通过智能控制柜将交流电变频后用潜油电缆输送到井下直线电机。当电流进入定子绕组,产生的磁场通过变频方式实现磁极的交变,与永磁动子上固定磁场的相互作用实现永磁动子的运动,从而使悬浮的永磁动子带动柱塞限位往复运动。
井下采油泵主要由直线电机、保护器和泵本体3部分组成,其装配关系如图1所示[5]。柱塞通过柱塞接头与直线电机动子相连,直线电机动子和定子为圆筒形。2个小端盖安装在保护器外管的两端,套管内装有预紧弹簧、内锥和外锥,并安装在拉杆上;储液腔内装有预紧弹簧;在保护器外管的内部及套管的一端装有填料、双向动压轴承、垫片、隔环等;填料、双向动压轴承、垫片、隔环安装在拉杆上;油管接头连接在隔膜泵体上,隔膜泵体上装有单向进油阀和单向出油阀,金属薄膜挤压在隔膜泵体、波纹管和腔体之间,波纹管固定在腔体上,波纹管、柱塞之间和储油腔内封装润滑油,储液腔内装有氟油;根据不同作业要求,可以将砂帽与分离器安装在油管接头和隔膜泵体之间;隔膜泵体也可以装配多个单向进油阀和单向出油阀。采用多个圆筒直线电机串联时,需增加扶正器,以提高柱塞的推力,并保证电机定子位置固定[6-7]。
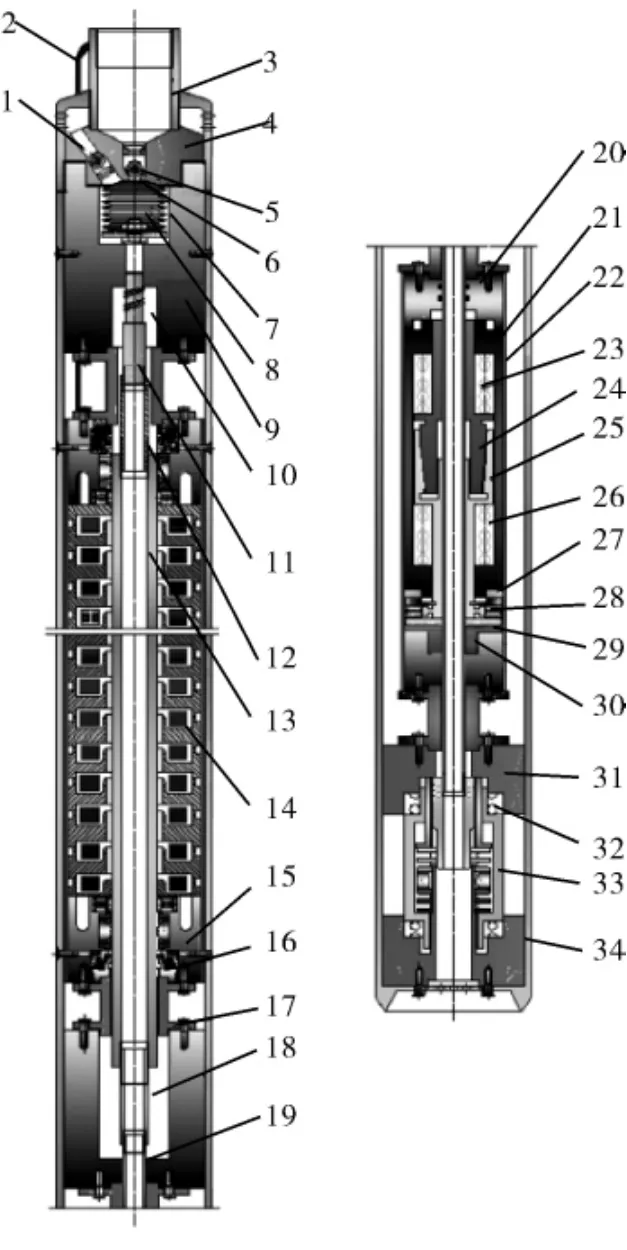
图1 新型直线电机采油泵结构
受井下空间限制,兼顾工作效率与出力要求,直线电机抽油泵的结构一般采用圆筒形动铁式或动磁式中空结构[8]。图2为直线抽油泵用圆筒形直线电机的结构,定子绕组为饼式环形绕组,同时设有霍尔传感器,动子上设有齿和齿槽。
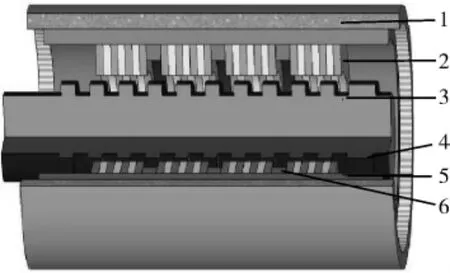
图2 圆筒形直线电机结构
2 直线电机数学模型
为了便于分析,不考虑边端效应;忽略铁芯饱和及温度对电机参数的影响;不计涡流损耗和磁滞损耗;不考虑温度等因素对永磁材料的影响。根据文献可推导出直线电机d-q坐标下的电压和磁链方程[9],其方程如下。
电压方程为

磁链方程为

式中,ψd、ψq为d、q轴磁链,Ld、Lq为d、q轴电感;ψf为永磁体等效磁链;R为每项绕组电阻;ω为永磁同步直线电机平移速度折算成的旋转电机角速度,ω=(π/τ)v,v为平移速度;τ为磁极中心距。
由式(1)可推导出其推力方程为
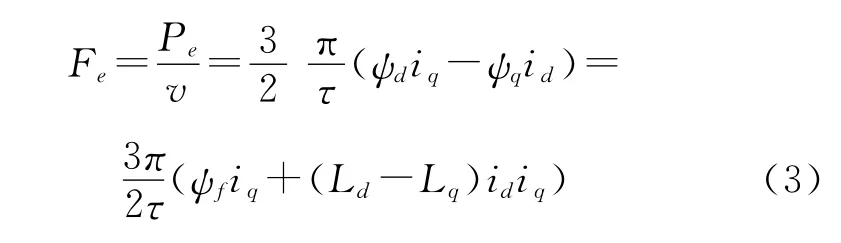
电机的机械运动方程为

式中,Fe为电磁推力;FL为负载阻力;Bv为粘性摩擦因数;m为运动部分质量,m=mr+mL;mr为动子质量;mL为动子带动的负载质量。
由式(1)~(4)构成了往复抽油泵直线电机d-q坐标系下的电机模型。
3 模糊控制器的设计
经典PID控制器离散的控制算法为

式中,u(k)为控制器的输出信号;e(k)为控制器的输入信号;Kp、Ki、Kd为控制器的比例系数、积分系数和微分系数。
对于传统的PID控制,由于Kp、Ki、Kd的数值固定,即使将这3个参数调节得很好,但还是很难满足现场的需要。
本文结合模糊控制和传统PID控制,采用模糊推力思想,根据不同的误差e和误差率ec对PID的3个参数进行在线调整。该控制由模糊推力部分和常规PID部分2部分组成,其结构如图3所示。
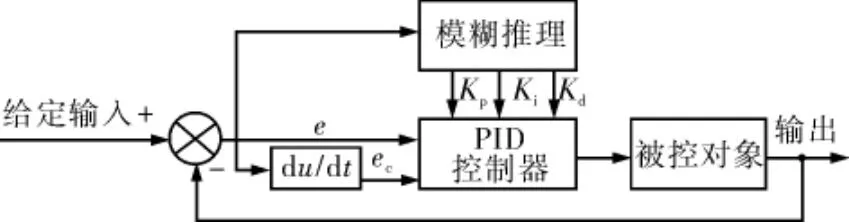
图3 模糊PID系统结构
根据直线电机的数学模型建立的速度PID控制机构如图4所示[9]。

图4 往复潜油电泵直线电机速度PID控制结构
对于本系统的模糊控制器,选取速度偏差e和ec为输入语言变量,其语言值的模糊子集为{负大,负中,负小,零,正小,正中,正大},并记为{NB,NM,NS,ZE,PS,PM,PB},同样,对Kp、Ki、Kd进行模糊[10-11]。Kp模糊控制规则如表1所示,其他Ki、Kd省略。
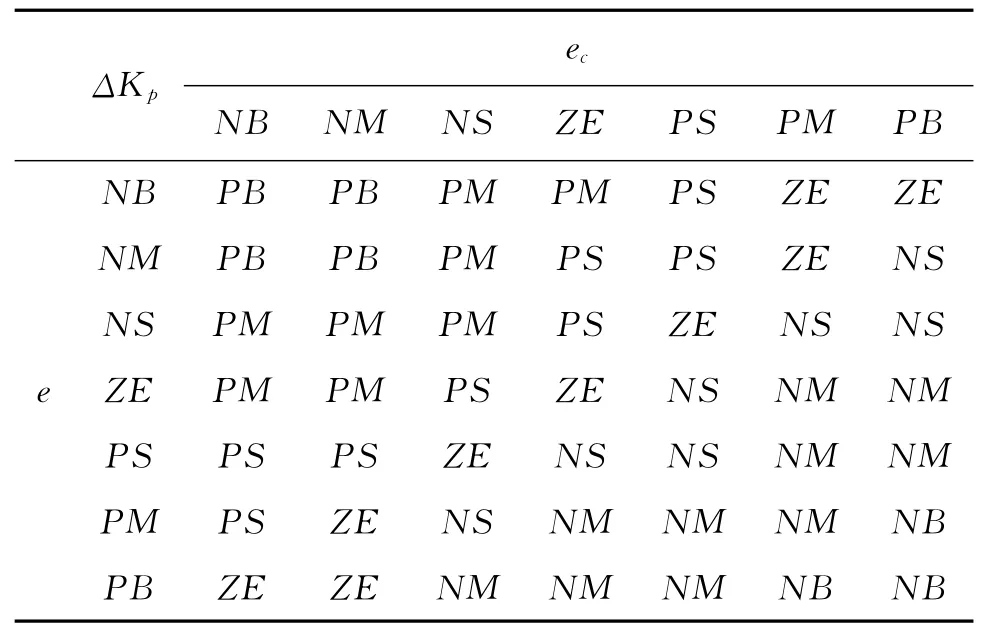
表1 Kp的模糊规则
4 仿真分析
采用Matlab中的FIS编辑器与Simulink相结合的方法进行仿真。仿真参数为:永磁体等效磁链ψf=0.1Wb,动子电枢电阻Rs=1.8Ω,动子d-q轴电感Ld=Lq=18.2mH,动子质量m=30kg,粘性摩擦因数Bv=0.2N·s/m,极距τ=18mm,电流放大倍数Ki=600,其效果图如图5~7所示。
由图5可明显看出,模糊PID控制的超调量与调整时间明显低于PID控制;由图6~7可以看出,在不同负载下PID控制有明显的影响,而模糊PID其抗干扰性比较强。
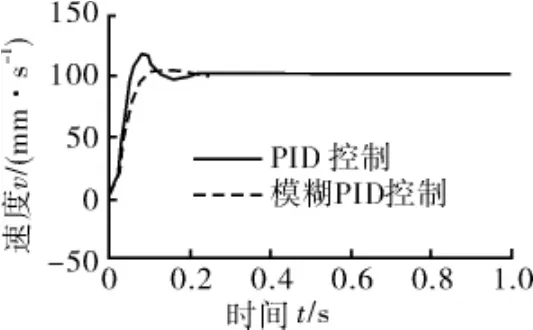
图5 PID与模糊PID控制比较
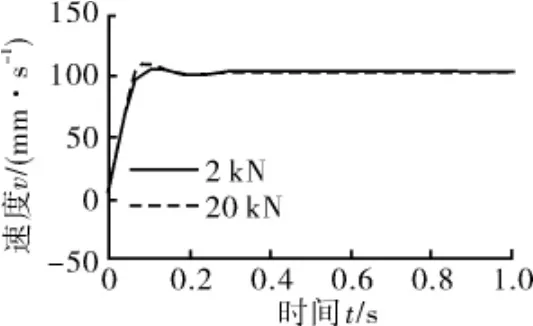
图6 模糊PID负载2kN与20kN时的比较
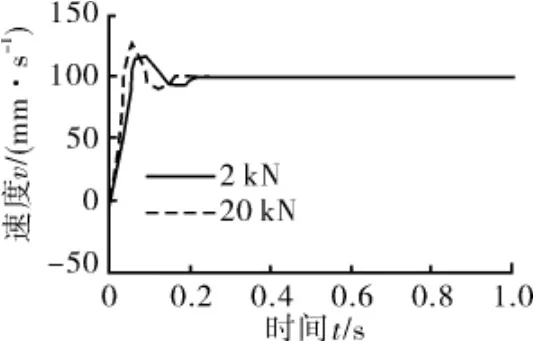
图7 PID控制负载为2kN与20kN时的比较
5 结论
1)通过对模糊控制与传统PID控制进行对比,发现模糊控制比传统PID性能好,超调量小,震荡较小,控制效果更好。
2)对往复潜油电泵控制系统的改进有很大的指导作用,为以后的研究奠定了基础。
[1]邱家友,周晓红,刘焕梅.安塞油田直线电机无杆采油工艺试验效果分析[J].石油矿场机械,2010,39(7):64-68.
[2]曲 海,魏秦文,梁 政,等.直线电机抽油泵泵阀不同工况特点研究[J].石油矿场机械,2010,39(3):12-17.
[3]杨铁宁,张金中.直线电机驱动往复泵流量压力变化规律试验研究[J].石油矿场机械,2009,38(4):56-61.
[4]陈晓丽,杨胡坤,苏 颖,等.直线电机抽油机运行参数优化设计[J].石油矿场机械,2009,38(9):46-49.
[5]魏秦文,刘 健,侯勇俊,等.直线电机在采油设备中的应用[J].石油矿场机械,2007,36(8):54-57.
[6]郭公喜,叶志强,李为民,等.直线电机驱动抽油机的试验研究[J].石油矿场机械,2005,34(4):17-20.
[7]魏秦文,张留昌.新型直线电机采油泵及其关键技术[J].石油矿场机械,2007,36(5):5-9.
[8]魏秦文,张 茂.直线电机采油泵存在的问题及改进措施[J].石油矿场机械,2007,36(6):6-13.
[9]郭庆鼎,万成元.直线交流伺服系统的精密控制技术[M].北京:机械工业出版社,2000.
[10]Yang Xia,Zhao Yan,Zhu Xiao,et al.Design and simulation of fuzzy PID controller for the movable beam in gantry machining center[C]//Proceedings of the IEEE International Conference on Automation and Logistics,2009:742-746.
[11]叶云岳,陆凯元.直线电机的PID控制与模糊控制[J].电工技术学报,2001,16(3):12-15.
猜你喜欢
中国设备工程(2022年21期)2022-12-21
科技创新与应用(2022年11期)2022-04-28
科学与财富(2021年35期)2021-05-10
有色设备(2021年4期)2021-03-16
水泵技术(2021年6期)2021-02-16
探索科学(学术版)(2020年5期)2021-01-20
微特电机(2020年7期)2020-07-28
重型机械(2020年2期)2020-07-24
微特电机(2020年3期)2020-03-24
电机与控制应用(2015年3期)2015-03-01