一种有效的道路背景提取与更新算法*
2012-11-24 02:17刘欣页李文举高连军尉秀芹
网络安全与数据管理 2012年7期
刘欣页,李文举,高连军,尉秀芹
(辽宁师范大学 计算机与信息技术学院,辽宁 大连 116081)
基于计算机视觉的运动目标检测技术是智能交通领域的重要研究课题,有着广阔的应用前景。目前的运动目标检测方法主要有光流法[1]、帧间差分法[2]和背景差分法[3-6]等。光流法计算复杂、抗噪性能差,需要强大的硬件支持。帧间差分法利用图像视频序列中相邻帧图像之间的差分来提取运动物体。该方法对场景变化不太敏感,稳定性好,有较强的自适应性,但一般不能完全提取出所有相关的特征像素点。背景差分法是目前运动目标检测和分类中应用较普遍的方法,其基本思想是用当前帧与背景图像进行差分来提取运动目标,该方法能得到比较精确的运动目标信息,可保持目标的完整性。但实际场景中的道路背景不是一成不变的,如何有效地实现背景图像的建立与更新是背景差分法的关键问题。
目前的道路背景建立算法主要有多帧平均法[4]、统计直方图法[5]和高斯模型估计法[6]等。在这些方法中,背景初始化与背景更新采用相同的方法,虽然初始背景参考帧不会受到场景中运动目标的影响,但背景更新的速度受到牵制。背景建立过程中运算量较大,占用内存时间长,当环境发生变化时,背景提取和更新达不到实时的理想效果。本文提出了一种将平均法与Surendra背景更新算法[7-8]相结合的背景提取及更新算法,实验表明,该算法能够快速获取并保持较高质量的背景图像,具有较好的鲁棒性和适应性。
1 背景建立的基本方法
1.1 多帧平均法
多帧平均法(TABI)是一种经典的背景提取及更新方法,其原理是统计图像序列每一像素的灰度平均值作为背景像素的灰度值,用一定时间的序列图像进行累加平均,运动区域的灰度偏差被消除,从而得到一个与当前静态场景相似的背景图像。按式(1)获得背景图像:

其中,Backgroud(x,y)表示所提取的背景图像的(x,y)点的灰度值,N 表示帧数,Imagei(x,y)表示第 i帧序列图像的(x,y)点的灰度值。
多帧平均法模型简单,只是单纯地累加平均。由于在计算背景均值时运动目标的像素点也参加了计算,这样就将运动目标的像素点叠加到背景中,因此需要大量的样本累计才能得到理想背景图像。
1.2 Surendra算法
Surendra背景更新算法的思路是利用二值化模板选择当前帧中需要更新的像素,进行选择性的更新。通过帧间差分和二值化得到含有运动区域的二值图bwk,即运动区域为二值图的内部 “空洞”,对背景作选择性更新,经过迭代得出背景图像。背景图像获取公式为:

其 中 ,Bk(x,y)为 当 前 计 算 所 得 背 景 图 像 ,B(x,y)为 已 知的背景图像,Ik为当前帧图像。
若像素点(x,y)在运动区域内,则为前景图像像素点,对背景图像不做更新,即该像素点由前一帧背景图像所对应像素点替代;若(x,y)不在运动区域内,则对该点作加权更新,α为更新系数,控制更新速度,通常取值范围为0.85~0.9。如此重复迭代,随着后续图像的增加,残余车辆影像逐渐消失,背景不断趋于理想。
Surendra背景更新算法存在的问题是,若初始帧不是一个理想背景而是有运动物体存在,则在背景更新过程中会有“鬼影”车辆出现,导致后续的检测工作出现严重偏差。使用含有运动车辆的道路背景进行车辆检测,会产生不理想的甚至错误的分割结果。
2 改进的背景提取与更新算法
均值法参数少、速度快,背景建立受初始帧是否有静止车辆影响小,但需要存储大量样本序列累计出背景图像后才可得到理想的背景图像。Surendra算法稳定、实时地进行选择性更新,但若初始帧含有运动车辆,则在更新过程中该运动物体变成静止的“鬼影”车辆,严重影响检测结果。本文将两者结合起来,首先用改进的均值法进行背景粗提取消除连续 “鬼影”,然后用改进的Surendra算法做背景更新,充分利用两种方法的优点,克服单一方法的不足。
2.1 背景粗提取
传统的多帧平均法只是对每一像素在图像序列中连续出现的灰度值做平均,导致在背景建立过程中混入运动车辆像素点留下的被“污染”痕迹。相比背景图像,像素点在有车经过时灰度变化较大,若用一定的阈值过滤掉一部分差异变化较大的点,则可以打乱被污染区域的连续性,之后利用车辆的物理特征,可实现在提取背景的过程中对车辆的检测。背景粗提取算法步骤如下:
(1)采用递推公式求取k帧图像的平均值MEANk:

(2)分别计算每一帧图像与平均值图像的差值meaDi;求连续 k帧图像的 meaDi和的平均值,记为MDk:

(3)设阈值为 αMDk(x,y),按式(6)求出初始背景图像:

其中,B为已知的背景图像,若当前帧与背景图像差值meaDi过大,说明该点灰度值变化较大,则对该点不做更新;而对变化较小的区域则认为是背景区域,用当前帧像素值做替换。其中,参数α为经验值,通常取1.0~1.2。
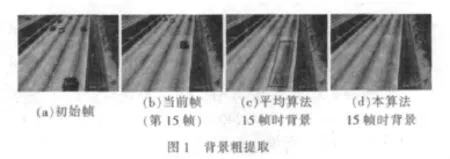
背景提取结果如图1所示。由于初始帧含有静止车辆,在随后的图像序列中车辆向前行驶,采用传统的平均算法提取背景有明显的连续污染区域存在(对应位置A已在图1(c)中标出);而本算法打乱了污染区域的连续性,尽可能减小初始帧静止车辆对后续背景建立的影响,运算过程采用递推公式,参数少、背景提取速度快且效果较理想。
2.2 背景更新
随着时间的推移和光照以及一些不可预测的路面情况等外部条件的不断变化,路面背景亮度发生缓慢或骤然的改变。如果一直用上述提取的背景做固定背景,随着时间的延续,必然会造成越来越大的误差。要保证系统长时间正常运行,需要适时地进行背景更新以保证背景图像的准确性和实时性。
Surendra算法通过帧间差分图像二值化后的空洞确定运动区域和非运动区域,但通常简单的形态学二值化所确定的运动区域间断而不完整,导致背景图像被车辆间断处的残留“鬼影”所污染,因此需进一步处理二值化图像。本文采用边缘检测与形态学运算相结合的办法提取出更为准确的运动区域,从而提高背景更新的准确性。改进算法如下:
(1)应用 Roberts算子对当前帧图像做边缘检测,得到边缘点集合SFk。
(2)将当前帧与背景差分得到的运动区域bwk与边缘点集合SFk作“或”运算,然后对“或”运算结果进行由上而下、由左至右的空洞填充,填充结束后去除不被利用的边缘点集合,得到完整的运动区域R。过程如图2所示。
(3)对运动区域进行选择性更新:

在实际应用中,往往会出现行进中车辆的骤驶和骤停、场景光线突然变化等情况,以而导致背景需要重新建立并更新。目前的背景更新方法没有提及在场景突然变化时如何对背景进行实时更新[9-11],本文采用帧间差分和背景差分相比较的方法实现对场景骤变的及时响应,对背景做出及时调整。具体方法为:
①计算帧间差分求出运动区域Rbw、背景差分运动区域 Rbb。
②中值滤波去噪后,统计帧间差分和背景差分连通区域的个数,分别记为numbw和numbb。
③对联通区域作进一步比较。N=numbw/numbb,若在一定阈值T范围之内,则说明背景未发生突然变化,继续实时更新;若超出阈值T范围,则环境发生突变。为避免误判,需多进行几次比较以确定背景发生改变,然后以当前帧作为背景,重新进行背景的提取与更新。
3 实验结果及分析
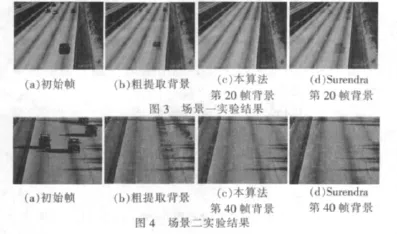
实验测试环境是MATLAB 7.5,3段视频取自互联网数据库,视频序列为320×240彩色图像,实验结果如图3、图4所示。场景一车辆阴影少,车流量相对较小,对视频序列前10帧采用平均法进行粗提取,之后进行背景更新。场景二车辆阴影大,车流量相对较大,对视频序列前20帧进行粗提取,之后采用背景更新。图3(b)和图4(b)为背景粗提取结果,打乱了污染区域的连续性;图3(c)和图4(c)为本算法在1 s左右时计算所得背景,已得到理想背景;图3(d)和图 4(d)为 Surendra算法结果,仍然残留有初始帧“鬼影”车辆。与Surendra算法相比,本文算法中初始帧运动车辆对背景的影响明显减小,背景建立结果准确。当前主流视频检测技术可达到每秒30帧图片,本算法可快速、准确地完成背景的建立与更新,保证实时性。
背景检测与更新技术在运动车辆检测中具有重要作用。本文提出了一种新的道路背景提取与更新算法,该算法采用改进的均值法进行背景粗提取,应用改进的Surendra算法做背景更新,能很好地适应外界条件的变化,背景建立速度快、鲁棒性强,具有较好的应用价值。
[1]王新余,张桂林.基于光流的运动目标实时检测方法研究[J].计算机工程与应用,2004(1):43-46.
[2]STRINGA E,REGAZZONI C S.Real-time video-shot detection for scene surveillance applications[J].IEEE Transactions on Image Processing, 2000(1):69-79.
[3]VERSAVEL J.Road safetythrough videodetection[C].Proceedings of 1999 IEEE/IEEJ/JSAI International Conference on Intelligent Transportation Systems,1999:753-757.
[4]Wu Bingfei, JUANG J, TSAI Pingsung, et al.A new vehicle detection approach in traffic jam conditions[J].Computational Intelligence in Image and Signal Processing,2007(3):1-6.
[5]Chen B S,Lei Y Q.Indoor and outdoor people detection and shadow suppression by exploiting HSV color information [C].The Fourth InternationalConference on Computerand Information Technology, Washington,DC,USA:IEEE Computer Society, 2004:137-142.
[6]STAUFFER C,ERIC W,CRIMSON L.Learning patterns of activity using real-time tracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22 (8):747-757.
[7]GUPTE S,MASOUND O.Detection and classification of vehicles[J].IEEE Transaction on intelligent transportation systems,2002,3(1):37-47.
[8]王正勤,刘富强.自适应背景提取算法的比较[J].计算机工程,2008,12(34):220-223.
[9]刘喆.基于计算机视觉的运动车辆检测与跟踪算法研究[D].北京:北京工业大学,2009.
[10]袁伟才,徐向民.一种有效的动态背景提取及更新方法[J].计算机工程与应用,2010,46(4):191-192.
[11]雷波,李清泉.复杂交通场景中车辆视频检测的背景提取与更新[J].武汉大学学报(信息科学版),2009,34(8):906-909.
猜你喜欢
数学杂志(2022年5期)2022-12-02
北京航空航天大学学报(2022年6期)2022-07-02
新世纪智能(数学备考)(2021年5期)2021-07-28
天津医科大学学报(2021年1期)2021-01-26
现代电子技术(2021年1期)2021-01-17
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年5期)2017-05-14
自动化学报(2017年11期)2017-04-04
光学精密工程(2016年1期)2016-11-07