基于虚拟样机技术的30 mm自动炮动态特性仿真研究
2012-11-22 01:43:26韩小平赵富全周世海
火炮发射与控制学报 2012年1期
韩小平,赵富全,郝 刚,周世海
(1.装甲兵工程学院 兵器工程系,北京 100072;2.总装备部 通用装备保障部,北京 100720 )
某型步兵战车上配备100 mm车载炮和30 mm自动炮(以下简称30炮),为了提高30炮射击密集度,将其与100 mm车载炮通过支架相连,但是在实际过程中30炮射击散布依然较大。笔者通过建立该型步兵战车武器系统的刚柔耦合动力学模型,100 mm车载炮进行简化建模,30炮进行细致建模,并进行仿真,重点分析30炮动力学特性,为提高连发射击密集度提供一定参考。
1 射击过程理论分析
30 mm炮身管长行程后坐的自动工作原理是利用炮弹发射时火药气体产生的后坐动能,使身管和炮尾进行长行程后坐,并通过炮尾带动其他机构运动。发射时,自动炮的身管、炮尾连同炮闩在火药气体的作用下后坐。身管、炮尾同炮闩首先进行自由后坐,在后坐距离达到一定程度时,开始压缩缓冲器弹簧直至后坐结束。
在被压缩的缓冲器弹簧的作用下身管开始向前复进,炮闩被自动阻铁卡住而停止运动,身管与炮尾继续在缓冲器弹簧的作用下复进,炮尾在复进的过程中与炮闩配合开锁、抽壳等一系列动作。
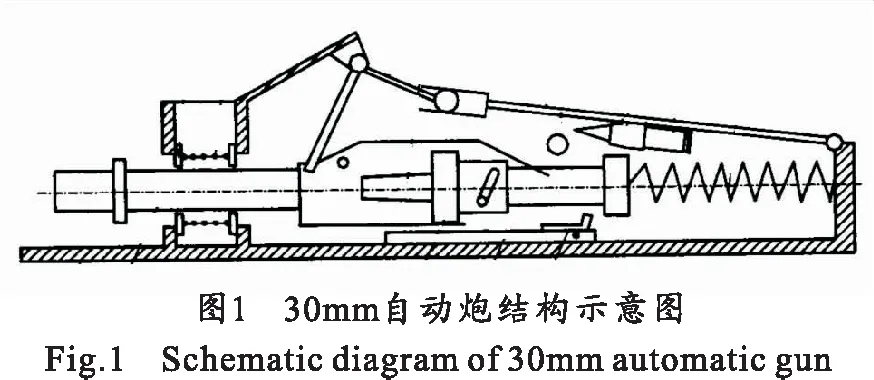
击发时,击发阻铁释放炮闩,炮闩在复进簧的作用下,向前复进到位,炮闩在复进的过程中与拨壳器配合完成拨壳、推弹进膛与抛壳、闭锁炮膛并压反跳锁释放炮尾的后端使身管在发射后能够后坐,从而实现连续射击。30 mm自动炮结构如图1所示。
2 动力学特性
2.1 自动炮射击循环的运动方程
由自动炮工作原理[1]可知,该自动炮可以等效为单自由度运动系统。取炮身为基础构件,带动其他从动构件运动,则其后坐复进遵循以下运动方程。
(1)
式中:F为作用于基础构件的给定力的合力在其速度方向的分量;Fi为作用于构件的给定力的合力在其速度方向的分量(或为转轴的给定力矩),它为广义力;mi为构件i的质量(或为转动惯量),它是广义质量;ki为从基础构件到构件i的广义传速比;ηi为从基础构件到构件i的效率。
2.2 自动炮各构件撞击方程
火炮发射时,自动炮各构件在连续传动过程中,伴随着剧烈的撞击。因此,建立各构件之间的撞击运动方程,是自动炮动力分析与计算的重要环节。建立撞击运动方程需作一定假设:撞击过程中各构件的外形不变,并略去撞击时外力冲量及弹簧力的影响,同时撞击瞬间完成,撞击时构件的位移不变,只有速度发生突变。则全系统在基础构件速度方向上的动量守恒表达式为:
(2)

2.3 缓冲簧力
缓冲簧由34对内外环构成,内环与外环接触面为一个圆锥面,环型簧变形时,外加载荷与各环的弹性力和摩擦力平衡,由于摩擦力在压缩(加载)和伸张(卸载)时改变方向,所以外加载荷在两个阶段是不相等的,因此缓冲簧刚度在后坐和复进过程中使用不同值。
后坐过程的缓冲簧作用力为:
(3)
复进过程的缓冲簧作用力:
(4)
式中:Xh0为缓冲簧预压缩量;X为缓冲簧压缩位移;Kh为缓冲簧压缩和释放时的刚度;η为缓冲簧工作机械效率。
2.4 弹带阻力
在拨进弹链的过程中拉动弹链的力为:
(5)
式中:m为带弹链节的单发炮弹质量;k为单个弹链节的刚度;Qnm为30发带弹链节的炮弹质量;v为弹链送进速度。
2.5 抽壳力
因自动炮在复进过程中抽壳,此时抽壳膛压可忽略不计,则抽壳力为:
F=2fπlεtE′δ
(6)
式中:εt为药筒相对紧缩量;l为药筒紧贴膛壁的长度;δ为药筒体的平均壁厚;f为摩擦系数。
3 刚柔耦合虚拟样机
3.1 多刚体动力学模型的建立
为了增加仿真效率,需要在三维实体模型的基础上进行合理简化和修正处理,要在满足分析研究的需要的条件下使模型零部件尽量少。该炮主要包括身管、缓冲器、炮箱、炮尾、复进簧、后盖、抛壳器等。在添加约束和边界条件后,建立了虚拟样机模型。为了精简模型并对炮身、炮闩的受力特性不造成影响,略去炮弹,在一次射击循环中弹丸与自动炮之间的相互作用使用等效力[2-3]。
3.2 刚柔耦合动力学模型的建立
首先从Solidworks中导出30炮身管的.x_t格式的文件。在ANSYS13.0中打开.x_t格式的文件,选择单元类型solid92、施加材料弹性模量为2.016 8×1011Pa,泊松比为0.29,密度为7.8×103kg/m3将支撑体划分网格,在后处理的ADAMS Connection中设置柔性体属性,然后生成支撑体的柔性体文件.mnf格式的文件。同时在ADAMS中导入MNF文件,用Rigid To Flex菜单命令将刚性身管替代成柔性体。100 mm车载炮简化模型不变。
3.3 炮多刚体动力学模型的验证
应用试验值来验证仿真模型的可信度是进行下一步分析的基础,通过部队调研和实弹射击测量来获得试验数据。从表1可以看出,各对比数据最大误差不超过10%,表中试验值均为多次试验给出的平均值,同时从整体上来看,自动炮完成单发时间试验平均值为156.73 ms,射速为382发/分,仿真值为153.9 ms,射速为378发/分。可以看出仿真值和试验值具有较好的吻合度[4-5]。

表1 炮身后坐时位移、时间、速度关系对比表
4 仿真计算及分析
4.1 模态分析
利用ANSYS Workbench 对身管进行模态分析。每一个模态具有特定的固有频率、阻尼比和模态振型。由于低阶模态对振动系统影响较大,越是低阶影响越大,故对身管的有限元模型求解共扩展了6阶模态。身管前6阶的固有频率和振型描述如表2所示。从前6阶固有频率可以看出身管的固有频率均较高,其1阶固有频率高于武器射击频率(该武器的射击频率大约是6.37 Hz),且不成整数倍,没有发生共振的危险,但是由于身管的前2阶振型均为整体振动,说明该身管的刚度较好。虽然从第3阶开始出现了弯振、扭振等局部振型,身管各部位刚度存在不均匀现象,但对武器的射击准确度几乎没有影响。身管前6阶模态如图2所示。

表2 身管前6阶模态

4.2 动力学仿真分析
对30炮刚柔耦合模型和多刚体模型进行动力学仿真计算,研究其炮口高低方向扰动规律。仿真时间为一个射击循环,即从第1发开始击发开始,到下一发闭锁击发为止,时间为0.157 s。30炮有无支撑时垂直方向扰动对比如图3所示。不同间隙时的30炮垂直方向扰动对比如图4所示。


从图3与图4中可以看出:
1)30炮身管依靠100炮身管支撑后,炮口扰动整体明显减小。30炮有支撑情况下,连发射击过程中,进行下一发射击时,炮口偏离初始位置位移分量为0.1 mm、速度分量为10 mm/s。而相应的无支撑时,位移分量为0.3 mm、速度分量为20 mm/s,支撑可以起到减小炮口扰动的作用。
2)支撑体圆柱形套筒与30炮身管上的凸台之间的间隙越小,炮口扰动整体明显减小。无间隙时,炮口偏离初始位移量为0.05 mm;0.15 mm间隙时,炮口偏离初始位移量为0.1 mm;0.3 mm间隙时,炮口偏离初始位移量为0.2 mm。
3)30炮在进行连发射击过程中,无论有无支持和间隙大小,下一发炮弹击发时,炮口高低向的位移和速度分量偏差量都非常小,基本都恢复到初始位置。
由此可以得到:
30炮身管本身的弹性形变引起的振动频率高,衰减快,基本在0.03~0.05 s之间已经衰减到开始的1/10,而一个射击循环时间为0.157 s,所以由于身管本身的弹性形变引起的振动并不是引起火炮射击散布大的主要原因。30炮的附加支撑体,对于身管来说是一种过定位安装结构,在同等加工精度下,减小了装配间隙,在一些情况下提高了30炮的射击密集度。但是无论有无支撑,在连续射击过程中,下一发击发时,火炮基本恢复到初始位置,因此火炮身管本身的弹性形变在众多影响火炮密集度因素中起到很小作用,与实际情况下该型步战车连发射击散布大是一致的,对于某些没有附加支撑的30炮,射击密集度是可以到达较高水平的,例如俄罗斯装备的30炮都没有使用附加支撑体,但是依然达到了相应的射击密集度,因此30 mm自动炮的连发射击密集度的影响因素需要进一步分析。
5 结束语
通过受力分析,建立了30炮的刚柔耦合模型并进行了验证。对30炮身管进行了模态分析,表明30炮本身拥有较好的动态特性。在建立的刚柔耦合虚拟样机的基础上对30炮进行了动力学仿真,结果表明30炮连发射击时散布大,并不是由于身管本身的弹性形变引起的,为下一步寻找引起30炮散布大的主要原因打下一定基础。
[1] 王宝元,周发明,衡刚.火炮系统动力学与密集度研究[C].弹道学术交流会论文集,2007,12:178-181.
WANG Bao-yuan, ZHOU Fa-ming, HENG Gang. The research of dynamics and dispersion of artillery system[C].Symposium on Ballistics Essay Collection ,2007,12:178-181.(in Chinese)
[2] 郑建荣.ADAMS—虚拟样机技术入门与提高[M].北京:机械工业出版社,2001:42-43.
ZHEGN Jian-rong. ADAMS accidence and & improvement of virtual protype technology [M].Beijing:China Machine Press,2002:42-43. (in Chinese)
[3] 隋振华. 30炮支架结构分析及其优化设计研究[D].南京:南京理工大学,2004:7-21.
SUI Zhen-hua. The analysis of the support and the research of the optimization design of 30mm gun[D]. Nanjing:Nanjing University of Science and Technology,2004:7-21. (in Chinese)
[4] MICHOT S,PIRANDAANDF J. TRIVAU_DEY. Optimization of simplified models meshed with finite triangular plate elements[J]. Journal of Sound and Vibration, 2002, 5 (25): 20-22.
[5] BOOK W J. Recursive lagrangian dynamics of flexible manipulator arms[J]. International Journal of Robotics Research.1984,3(3):87-101.
猜你喜欢
火炮发射与控制学报(2023年4期)2023-08-29 03:34:20
新技术新工艺(2022年12期)2022-02-14 07:32:18
兵器装备工程学报(2020年11期)2020-12-16 10:11:20
舰船科学技术(2019年5期)2019-06-03 08:30:06
机械工程师(2018年6期)2018-06-14 06:12:28
光学精密工程(2016年3期)2016-11-07 09:03:44
中国学术期刊文摘(2016年8期)2016-02-13 13:04:44
机械工程与自动化(2015年4期)2015-12-31 11:07:26
机械工程与自动化(2013年6期)2013-09-13 04:23:00
海外星云 (2011年24期)2011-04-29 00:44:03