
航天器交会轨迹分类研究概述
2012-11-20 08:42:54朱仁璋王鸿芳徐宇杰
载人航天 2012年3期
朱仁璋 ,王鸿芳 ,徐宇杰
(1南京大学,南京210008;2中国空间技术研究院,北京100094;3北京航空航天大学,北京100083)
1 引言[1-6]
从人类航天史上第一次轨道交会至今,将近半个世纪的岁月过去了。美国与前苏联/俄罗斯早在20世纪60年代就开始研发交会对接技术,这项技术最初是为载人登月使命服务的。1969年7月美国“阿波罗”11号载人飞船成功登月后,交会对接技术主要用于空间站的组建、乘员运输与货物补给,以及救生船的停靠。未来的空间活动(如建立月球基地、载人小行星往返飞行以及载人登火星等),对交会对接的自主性、自动化、可靠性与安全性(包括星际航行的空间救援)提出了更高的要求。
1965年12月,美国“双子座”6号与7号飞船成功进行了轨道交会飞行,两艘载人飞船在绕地球长达3圈的飞行期间,保持30cm~90m的距离。1966年3月,“双子座”8号载人飞船与“阿金纳”火箭末级首次实现了太空交会对接。前苏联/俄罗斯最早在1967年4月曾尝试“联盟”1与“联盟”2载人飞船的交会对接,但因“联盟”1飞行故障,不得不取消“联盟”2的发射任务,而“联盟”1航天员也英勇献身。1967年10 月,“宇宙”186 与“宇宙”188 对接,这是前苏联/俄罗斯两艘无人飞船之间的首次成功对接。1969年1月,载人飞船“联盟”4与“联盟”5完成对接,且两名航天员通过舱外行走,从“联盟”5转移进入“联盟”4,这是前苏联/俄罗斯首次实现载人航天空间交会对接。
半个世纪以来,进行交会对接/停靠飞行或飞行试验空间规划(或项目)的追踪航天器主要有下列12项:美国的“双子座”飞船,“阿波罗”飞船,航天飞机,以及“实验卫星系统-11”(Experimental Satellite System-11,XSS-11),“自主交会技术验证”(Demonstration of Autonomous Rendezvous Technology,DART)系统,“轨道快车验证系统”(Orbital Express Demonstration System,OEDS);前苏联/俄罗斯的“联盟”号载人飞船与“进步”号货运飞船;欧洲航天局的“自动转移飞行器”(Automated Transfer Vehicle,ATV);日本的“工程试验卫星-7”(Engineering Test Satellite VII,ETS-VII) 与“H-II转移飞行器”(H-II Transfer Vehicle,HTV);中国的神舟八号飞船。此外,美国正在研制“猎户座”空间运输系统,以及“龙”与“天鹅座”商业运输器,计划参与国际空间站(ISS)的运输与服务任务;这里还要提到或许将来可能应用的“黑天空”运输航天器。
2 交会轨迹分类[1-7]
对航天器交会逼近飞行可以应用惯性系,描述目标航天器与追踪航天器的轨道运动(绝对运动)。然而,更常用的是在“当地垂线/当地水平”(Local-Vertical Local-Horizontal,LVLH)坐标系中描述追踪航天器相对目标航天器的运动,即相对运动。LVLH系(图1)的坐标原点位于目标航天器质心,xz平面为目标航天器轨道面,z轴(R-bar)指向地球中心,x轴(V-bar)指向目标航天器轨道运动方向,y轴(H-bar)垂直于轨道面(沿负法向)。
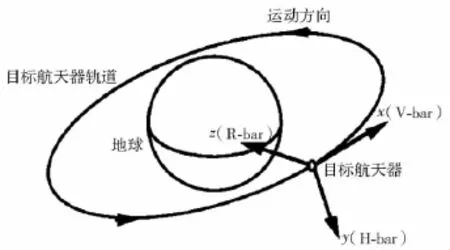
图1 标准“当地垂线/当地水平”(LVLH)坐标系
航天器交会飞行轨迹设计是交会对接使命顶层设计的重要组成部分。在交会飞行轨迹设计中,共椭圆轨道是一个很重要的概念。所谓“共椭圆轨道”就是共面、同心的椭圆轨道,即共椭圆轨道的轨道倾角、升交点赤经、近地点幅角相同,且半长轴(a)与偏心率(e)的乘积(ae)相等(图2)。因此,对小偏心率轨道,若目标航天器与追踪航天器处于两个共椭圆轨道上,且相距较近,则追踪器在LVLH系中的运动轨迹近似为平行于x轴(V-bar)的直线,相对速度x˙近似为常量,x˙=(3/2)nΔh,这里 n 为目标航天器轨道平均角速率,Δh为追踪航天器轨道相对目标航天器轨道的高度差,Δh=Δr≈Δa(1+e2sin2f)≈Δa,式中 Δr为轨道向径差,f为真近点角。因此,在调相段过后,通常选择共椭圆轨道作为从绝对导航阶段(地面控制段)向相对导航阶段(自主交会段)的过渡轨道[1]。在交会航天器相对导航确立后,可在共椭圆轨道上选择一点,作为向终段转移的起始点,该终段也称为邻近运作与对接段。终段起始(Terminal Phase Initiation,TPI)机动通常采用冲量型推力[3-6]。

图2 共椭圆轨道几何[7]
基于共椭圆轨道的交会逼近主要有以下5种方案[1-7]:①共椭圆视线推力逼近,即追踪航天器从共椭圆轨道出发,应用沿视线(追踪航天器指向目标航天器)方向的冲量推力,朝向目标器逼近。②稳定轨道保持点逼近,即追踪航天器先从共椭圆轨道转移到-V-bar稳定轨道,再从-V-bar上的保持点出发,沿-V-bar轴向目标航天器逼近,或向其它对接轴方向转移(如由-V-bar向+R-bar,+V-bar,或-R-bar转移)。③双共椭圆交会逼近,即交会逼近段包含两个共椭圆轨道,由第2共椭圆轨道向对接轴转移。④共椭圆加偏置点逼近,即追踪航天器先从共椭圆轨道进入相对速度为零的偏置点,再由偏置点向对接轴(+R-bar,+V-bar,或-R-bar)转移。⑤稳定轨道点与共椭圆轨道的组合方案。
2.1 共椭圆视线推力逼近[5,7-10]
美国“双子座”与“阿波罗”采用共椭圆视线推力法,应用指向目标航天器视线方向的冲量推力,追踪航天器从目标航天器后下方进入飞向目标器的转移轨道,与目标航天器逼近,其终段起始(TPI)点视线角(即仰角α)的选取与转移轨迹飞行时间有关。共椭圆轨道高度差(Δh)的确定,既要考虑视觉捕获目标的距离(尽可能靠近),又要考虑减小转移轨迹对轨道射入误差的敏感性(尽可能离远)。图3为“双子座”与“阿金纳”交会轨迹图;图4为“阿波罗”登月舱与指令舱的交会轨迹图,其中图4(a)中CDH(Constant Delta-H)表示“定差高度机动”,CSI(Co-elliptic Sequence Initiation)表示“共椭圆序列起始”;图5为“阿波罗”与“天空实验室”交会轨迹图。
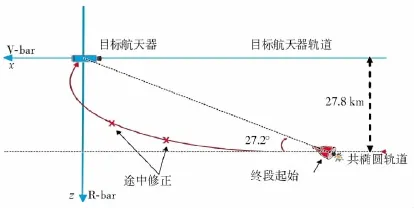
图3 “双子座”与“阿金纳”交会轨迹[5,8]
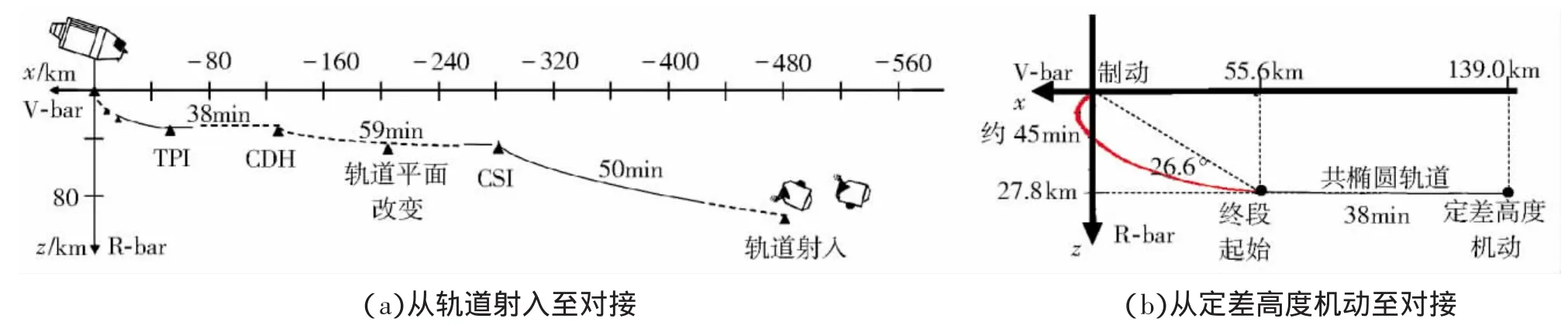
图4 “阿波罗”登月舱与指令舱交会轨迹[5,9-10]
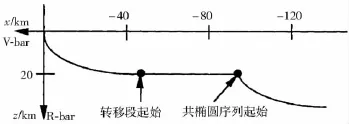
图5 “阿波罗”与“天空实验室”交会轨迹[7]
2.2 V-bar稳定轨道点逼近[1-6,8,11-15]
2.2.1 航天飞机[5,11]
与“双子座”与“阿波罗”的共椭圆视线推力逼近方案不同,美国航天飞机先从共椭圆轨道转移到目标航天器轨道上的一个位置保持点,然后从位置保持点起始执行最终逼近。这就是“V-bar稳定轨道点逼近”策略。航天飞机与ISS的交会飞行经历2个方案(图6):①1983年至1997年期间,航天飞机在转移到-V-bar(ISS后约74km)后,通过两次径向机动(经两个“半椭圆形相对运动轨迹”),进入“转移起始 ”(Transition Initiation,Ti) 机 动 点 (ISS 后 约15km)。②1997年后,航天飞机在转移到-V-bar(也是ISS后约74km)后,采用一次径向机动(经由一个半椭圆形相对运动轨迹),直接进入Ti机动点,该方案称为“最优化R-bar瞄准交会”。
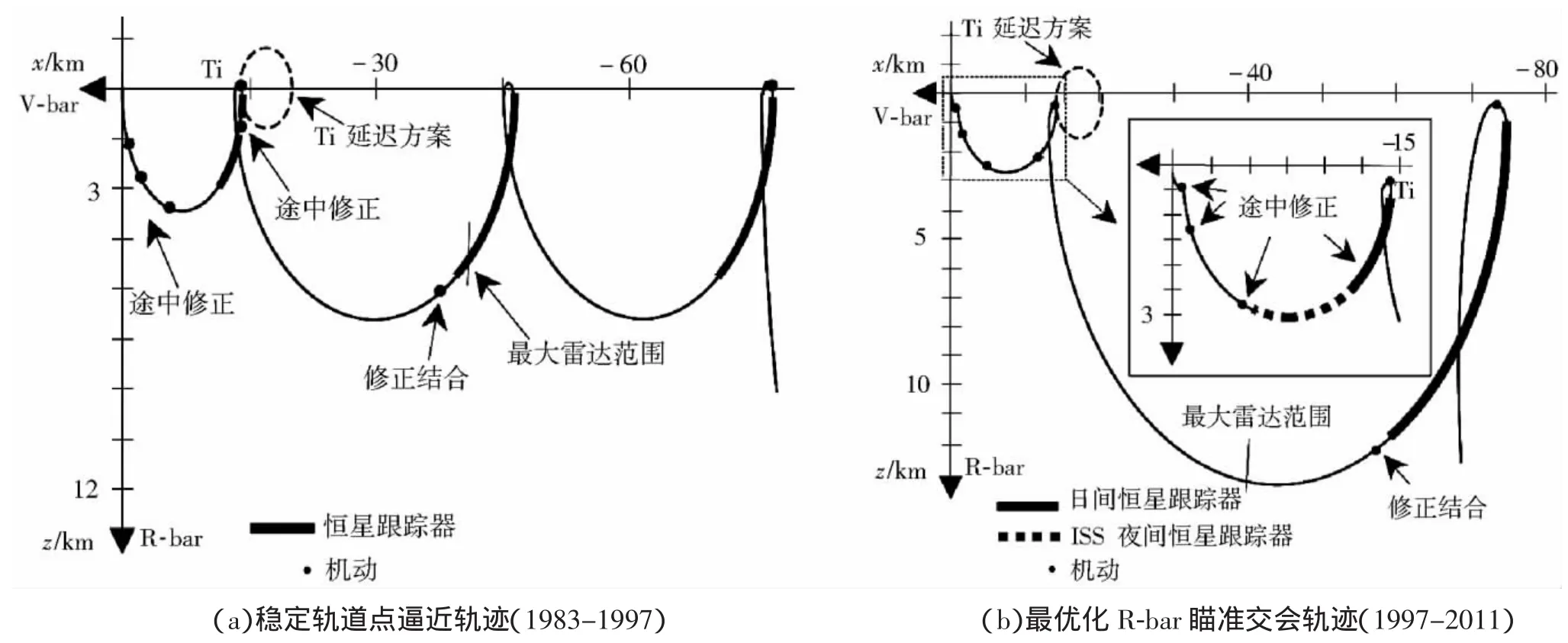
图6 航天飞机交会轨迹[5,11]
对最终逼近,航天飞机通常应用两种模式(图7),即+V-bar逼近或+R-bar逼近。若选择+R-bar逼近,当航天飞机穿越+R-bar时,执行-V-bar方向的冲量机动,以减小前向速度。按轨道力学原理,航天飞机将自然地沿着一条再穿过+R-bar的轨迹向后飞行(图7(a)中的虚线)。因此,在+R-bar穿越点,施加另一个冲量机动,该冲量的两个分量分别沿-R-bar方向(向上)与沿+V-bar方向(向前),使航天飞机缓慢“跳”向目标。对+V-bar逼近,航天飞机转移到距目标航天器+V-bar轴上时,朝向目标航天器改变速度,开始沿+V-bar的最终逼近。为保持在+V-bar上,需施加一个向上的(沿-R-bar)速度增量,促使航天飞机缓慢地向目标航天器“跳跃”,直到两个航天器对接。

图7 航天飞机向ISS逼近轨迹[1,5]
2.2.2 工程试验卫星-7[4,12]
图8为日本“工程试验卫星-7”(ETS-VII)沿+V-bar向目标星交会逼近的轨迹图,图中MCM(Mid-Course Maneuver)表示“途中机动”。
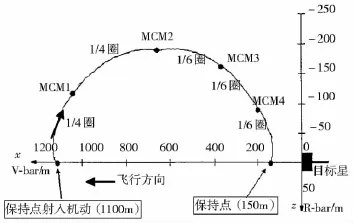
图8 “工程试验卫星-7”(ETS-VII)交会轨迹[4,12]
2.2.3自动转移飞行器[3,13]
图9为欧洲航天局“自动转移飞行器”(ATV)沿-V-bar的交会轨迹图。
2.2.4 H-II转移飞行器[4,14]
图10为日本“H-II转移飞行器”(HTV)交会轨迹图,包括由-V-bar向+R-bar的转移,沿+R-bar的最终逼近,以及解除对接后的分离、降轨的飞行轨迹。图10(a)中的方框图放大表示在图10(b)中,描绘邻近运作飞行。图10(a)中,PM(Phasing Maneuver)表示“调相机动”,HAM(Height Adjusting Maneuver)表示“高度调整机动”,CM(Co-elliptic Maneuver)表示“共椭圆机动”,DSM(Descending Maneuver)表示“下降机动”,DOM(Deorbit Maneuver)表示“降轨机动”。
2.2.5自主交会技术验证[5,8]
图11表示美国“自主交会技术验证”(DART)飞行器沿-V-bar逼近的交会轨迹图。图中,AB为初始停泊(调相)轨道,BC为转移轨道,CD为共椭圆(调相)轨道,DE为终段转移轨道,从点E开始最终逼近。
2.2.6 轨道快车[5,15]
美国“轨道快车”共进行了5次演习,图12表示第4次演习计划的交会轨迹。如图所示,这次演习飞行从追踪航天器与目标航天器分离开始,通过“走廊离开/调相机动”与“高度调整机动”向后转移到离目标航天器4km的位置,在这一点施加径向冲量机动到达离目标航天器1km的位置,再施加一次径向机动到达离目标航天器120m的位置保持点,从这一点开始最终逼近。
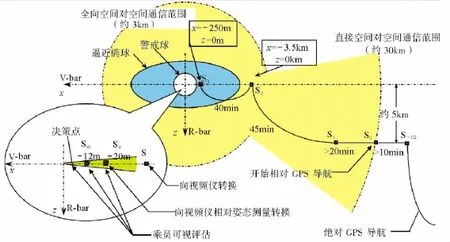
图9 “自动转移飞行器”(ATV)交会轨迹[3,13]

图10 “H-II转移飞行器”(HTV)交会轨迹[4,14]
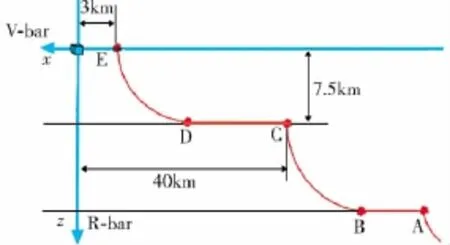
图11 “自主交会技术验证”(DART)飞行器交会轨迹[5,8]
2.2.7神舟八号[16-17]
图13表示中国神舟八号飞船作为追踪航天器向天宫一号目标航天器沿-V-bar的逼近轨迹。神舟八号飞船在-V-bar上距天宫一号5km、400m、140m、30m处设置4个停泊点。
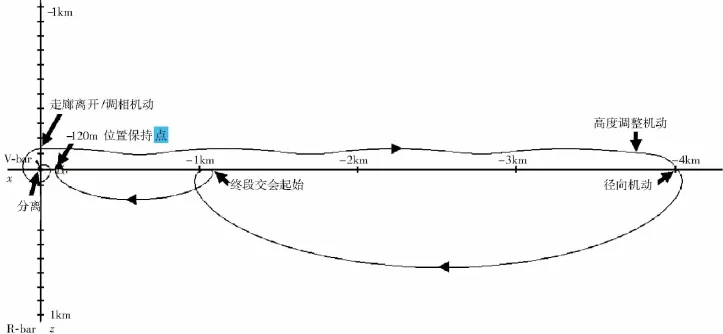
图12 “轨道快车”交会轨迹[5,15]
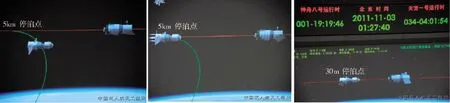
图13 神舟八号飞船向天宫一号目标航天器的逼近轨迹[16-17]
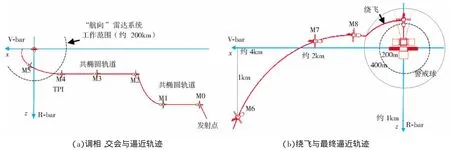
图14 “联盟”号/“进步”号交会轨迹[6,8]
2.3 双共椭圆轨道逼近[1,5-6,8,13,18]
2.3.1“联盟”号/“进步”号[6,8]
图14描述“联盟”号或“进步”号飞船向ISS(目标航天器)的交会飞行,交会轨迹设计采用双共椭圆与绕飞策略。交会段由初始轨迹射入点(M0)至“终段起始”(Terminal Phase Initiation,TPI)点(M4)。在发射及初始轨道射入机动(M0)后,执行两个机动(M1和M2),将飞船转移到调相高度,进入共椭圆轨道。在漂移期间,施加轨迹修正机动(M3),减小轨迹弥散。逼近与制动段由TPI点(M4)至到达对接轴线,这一段也称为“向对接轴转移”段。在TPI机动后不久,飞船离目标航天器约200km时,进入“航向”(Kurs)微波交会雷达系统运作范围,“航向”系统开始对目标航天器的搜索与捕获。“航向”系统可更新两航天器的测算位置,并在距空间站约100km处执行逼近轨迹修正机动(M5)。在向目标航天器逼近时,为使制动过程平稳,施加三个冲量机动(M6,M7,M8)。第一个制动机动(M6)出现在飞船在目标航天器轨道之下约1km、目标航天器之后约4km的位置。在最后一次制动机动(M8)之后,很可能当前的逼近轨迹与目标航天器的对接口尚未对准。因此,为使飞船在最终逼近段沿目标航天器对接轴以满足对接初始条件的相对状态向目标航天器逼近,飞船在离目标航天器200m~400m距离之间进行绕飞。不管对接轴指向是否沿V-bar,R-bar,或某惯性固定轴,飞船均可通过绕飞到达对接轴线上。
2.3.2 实验卫星系统-11[5,8]
图15为美国“实验卫星系统-11”(XSS-11)交会轨迹图。图中AB为初始调相轨道,CD与EF为共椭圆轨道,FG为近距邻近段,从点G开始沿+V-bar的最终逼近。
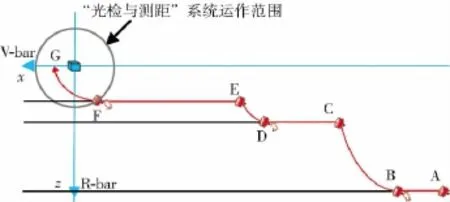
图15 实验卫星系统-11(XSS-11)交会轨迹[5,8]
2.3.3“龙”飞船[1,5,18]
图16为美国“龙”飞船双共椭圆交会逼近与绕飞轨迹图。图中,LIDAR(Laser Imaging Detection And Ranging)为“激光探测成像测距”导航敏感器,即所谓“龙睛”(DragonEye);NMC(Natural Motion Circumnavigation)意为“自然运动绕飞”,NMC轨迹是以目标航天器为中心的椭圆,椭圆长轴为短轴的双倍[1,6];RGPS(Relative GPS)表示“相对 GPS”。
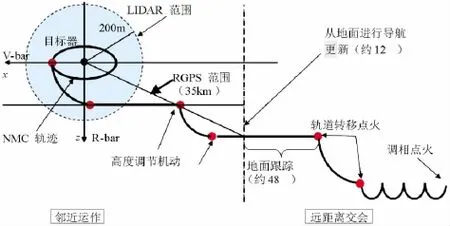
图16 “龙”飞船交会轨迹[5,18]
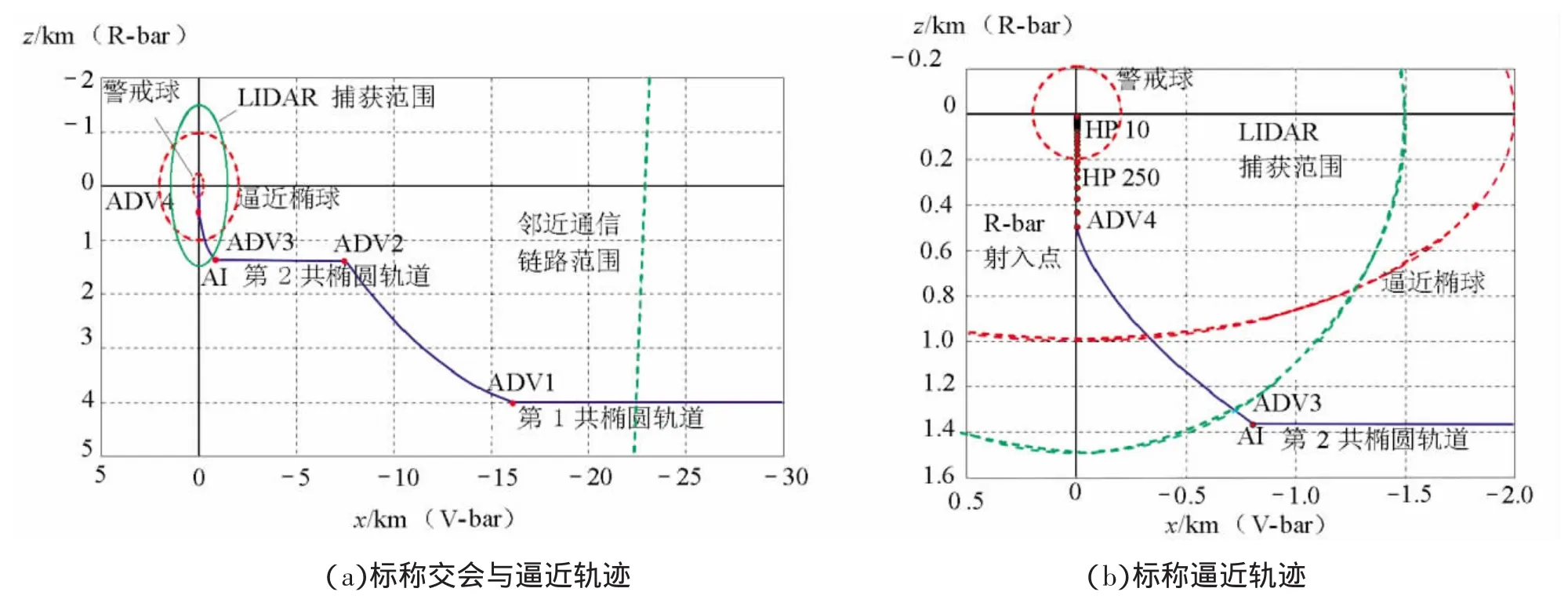
图17 “天鹅座”飞船交会轨迹[5,13]
2.3.4“天鹅座”飞船[5,13]
图17为美国“天鹅座”飞船双共椭圆交会逼近与+R-bar最终逼近轨迹图。图中,ADV表示“推进冲量”,AI为“逼近起始”,HP 表示“保持点”,LIDAR 表示“光检与测距”。
2.4 共椭圆加偏置点逼近[5,19]
美国“猎户座”飞船在地球轨道交会对接使命中采用共椭圆加偏置点逼近策略,“乘员探索飞行器”(CEV)沿+V-bar或+R-bar向 ISS作最终逼近,飞行轨迹参见图18与图19。如图所示,飞行轨迹可分为两段:第1段为共椭圆轨道向偏置点的转移,对+V-bar逼近与+R-bar逼近均适用;第2段为偏置点至“加压联接适配器-2”(PMA-2)或“加压联接适配器-3”(PMA-3)对接轴的转移。
(1)终段起始(TPI)机动(从第2共椭圆轨道向偏置点转移)。为CEV设计的邻近运作段,从TPI机动开始,这一点位于交会调相段第2共椭圆轨道上。在TPI之前直到对接的这段期间,CEV体坐标的+X轴总是指向目标航天器。这使CEV乘员得以观测CEV前向窗外的情景,且可获得对目标航天器相对敏感器的可见性(即可观测到目标航天器上的相对敏感器)。TPI机动旨在将CEV转移到目标器91m之后、305m之下的偏置点(即图18与图19中的点3),到达这一点时的相对转移速率为零。
(2)偏置点至PMA-2对接轴转移(图18)。偏置点向PMA-2对接轴(+V-bar)的转移机动记为TDA2(Transition to Docking Axis 2),CEV到达PMA-2对接轴的位置记为ADA2(Acquisition of Docking Axis 2)。
(3)偏置点至PMA-3对接轴转移(图19)。偏置点向PMA-3(+V-bar)转移的机动记为TDA3,到达对接轴的位置记为ADA3。
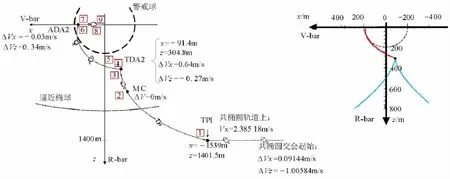
图18 “猎户座”+V-bar逼近轨迹[5,19]
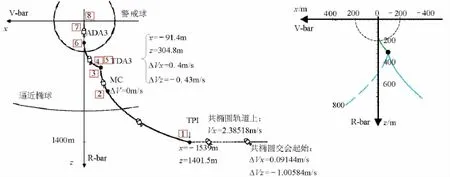
图19 “猎户座”+R-bar逼近轨迹[5,19]
2.5 稳定轨道与共椭圆组合逼近[5,20]
美国“黑天空”航天器是“黑天空运输系统”(Black-Sky Transit Systems)建议的项目,采用稳定轨道加共椭圆的逼近策略,即先到达-V-bar稳定轨道保持点,然后再转移到共椭圆轨道,并沿共椭圆轨道漂移到+R-bar对接轴上。如图20所示,远距交会后,飞行器到达起始瞄准点,近距邻近运作可从这一点开始。近距邻近运作序列如下:①从S0(起始瞄准点)自由漂移,直至到达S1,执行霍曼转移;②从S1至目标轨道上S2的霍曼转移;③在S2点位置保持(S2在逼近椭球之外离ISS 3000~5000m),在保持点进行系统检测,光照条件同步修正,及乘员时间安排;④从S2至进入ISS之下500m漂移轨道的S3的霍曼转移;⑤从S3沿共椭圆轨道(自由漂移轨迹)进入逼近椭球(AE),到达 R-bar(S4);⑥在 S4执行去掉漂移速度使其停止的助推;⑦从S4向停靠箱(在ISS之下约15m)的R-bar逼近,采用类似航天飞机与HTV的R-bar逼近策略;⑧在停靠箱中的位置保持,直到空间站自动臂(SSRMS)准备好抓取“黑天空”航天器。
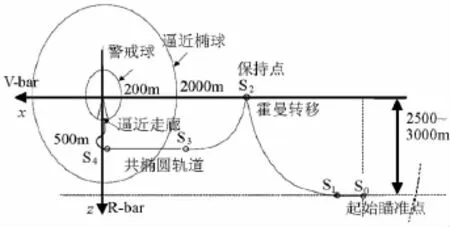
图20 “黑天空”交会轨迹[5,20]
3 各类交会轨迹特点
航天器交会轨迹的类别选择与参数设计应综合考虑下列情况:陆海基及天基测控与通信条件,相对导航敏感器工作范围与测量精度,光照要求,飞行安全区,交会飞行时间,乘员作息安排(涉及轨迹机动),对接口方位(涉及对接轴指向)等。其中,相对导航敏感器的性能与精度对交会轨迹的可观测性与弥散度(涉及安全性)有显著影响,是交会轨迹类别选择的重要因素。以上五种交会轨迹的基本特点如下:
(1)共椭圆视线推力方案(如“双子座”及“阿波罗”飞船)适于干涉测量型交会雷达系统,并以空间六分仪作为相对导航备份设备[8];光学观测设备与所期望的定向驾驶特征是选择这种方案的主要原因。但这种方案对交会轨迹限制较严,且需要航天员介入,而随着相对导航技术的进展,该方案已不再应用。
(2)V-bar稳定轨道点逼近方法(如航天飞机,ATV,HTV,神舟八号飞船)的长处是:①在交会逼近期间可提供在V-bar上“暂停”前进的机会,而基本上无动力消耗;②可提供更多的地面交互机会。这种方法通常需应用精度高、视场较小的激光交会雷达系统,且交会飞行时间较长。
(3)双共椭圆逼近(如“联盟”号、“进步”号、“龙”、“天鹅座”飞船)的长处是:①通过调制共椭圆轨道的高度差,可提供不同的接近速率,以满足交会时间与照明等约束条件;②双共椭圆的直线型相对轨迹容易被剪裁,以满足相对导航与通信等方面的要求;③邻近飞行具有良好的被动安全性。这种方法常用于+R-bar逼近,或通过绕飞到达+V-bar或-R-bar对接轴上。对单一的微波交会雷达系统(如“联盟”号与“进步”号),双共椭圆是一种适合的交会轨迹。
(4)共椭圆加偏置点方案(如“猎户座”飞船)的长处是:①可同时兼顾+V-bar与+R-bar两种逼近方式,即使入轨后也可在偏置点选择不同的逼近路径;②对+V-bar与+R-bar两种逼近方式均可提供被动的轨迹安全性。
(5)稳定轨道与共椭圆组合方案(如“黑天空”航天器)将两者(稳定轨道与共椭圆)的长处都应用在交会轨迹设计中,适用+R-bar逼近与绕飞运作,但交会飞行时间相应加长。
4 结束语
共椭圆轨道追踪航天器以常值速度向目标航天器接近,有利于交会运作;特别是,若相对导航敏感器捕获失效,或逼近段起始机动失效,追踪器仍保持在目标器的下方平移,具有良好的被动安全性。因此,基于共椭圆轨道的航天器交会轨迹在交会逼近方案中被广泛地、有选择性地采用。
目前,常用的航天器交会轨迹,是以美国已退役航天飞机为代表的V-bar稳定轨道点逼近方法和以前苏联/俄罗斯“联盟”号与“进步”号飞船为代表的双共椭圆逼近方法。随着相对导航自动化与自主性程度的不断提高,为满足未来航天器交会对接使命的需求,还可能采用共椭圆加偏置点方案,稳定轨道与共椭圆组合方案,或其他形态的交会逼近轨迹。
[1]朱仁璋.航天器交会对接技术[M].北京:国防工业出版社,2007.
[2]Fehse W.Automated Rendezvous and Docking of Spacecraft[M].Cambridge University Press,2003.
[3]朱仁璋,王鸿芳,徐宇杰,等.ATV交会飞行控制策略研究[J].航天器工程,2011,20(1).
[4]朱仁璋,王鸿芳,徐宇杰,等.从ETS-VII到HTV-日本交会对接/停靠技术研究[J].航天器工程,2011,20(4).
[5]朱仁璋,王鸿芳,徐宇杰,等.美国航天器交会技术研究[J].航天器工程,2011,20(5).
[6]朱仁璋,王鸿芳,肖清,等.苏/俄交会对接技术研究[J].航天器工程,2011,20(6).
[7]Fogle D A.Robust Rendezvous Maneuver Point Conditions[R/OL].[2011-09-13].http://dspace.mit.edu/bitstream/handle/1721.1/42541/27479840.pdf?sequence=1.
[8]Woffinden D C,Geller D K.Navigating the Road to Autonomous Orbital Rendezvous[J].Journal of Spacecraft and Rockets,2007,44(4):7-8.
[9]Zimpfer D,Kachmar P,Tuohy S.Autonomous Rendezvous Capture In-Space Assembly Past.Present and Future,AIAA 2005-2523[R].Washington:AIAA,2005.
[10]NASA.Project:Apollo 10 Press Kit[R/OL].[2011-09-13].next.nasa.gov/alsj/a410/A10_PressKit.pdf.
[11]Goodman J L.History of Space Shuttle Rendezvous and Proximity Operations[J].Journal of Spacecraft and Rockets,2007,43(5):9-10.
[12]Kawano I,Mokuno M,Kasai T,Suzuki T.Result of Autonomous Rendezvous Docking Experiment of Engineering Test Satellite-VII[J].Journal of Spacecraft and Rockets,Vol.38,No.1,2001:1-2.
[13]Miotto P,Breger L,Mitchell I,Keller B.Designing and Validating Proximity Operations Rendezvous and Approach Trajectories for the Cygnus Mission.AIAA 2010-8446[R].Washington:AIAA,2010.
[14]JAXA.HTV2(Kounotori 2)Mission Press Kit[R/OL].[2011-01-20].http://iss.jaxa.jp/en/htv/mission/htv-2/library/presskit/htv2_presskit_en.Pdf.
[15]Mulder T A.Orbital Express Autonomous Rendezvous And Capture Flight Operations Part 2 of 2:AR&C Exercise 4,5,And End-Of-Life,AIAA 2008-6768[R].Washington:AIAA,2008.
[16]中国载人航天工程网.神舟八号到达相距天宫一号5千米停泊点(图)[R/OL].http://www.cmse.gov.cn/video/show.php?itemid=2263.
[17]中国载人航天工程网.神舟八号抵达30米停泊点(图)[R/OL].http://www.cmse.gov.cn/video/show.php?itemid=2268.
[18]Mitchell I T.Draper Labroatory Overview of Rendezvous and Capture Operations[R/OL].[2011-09-13].http://ssco.gsfc.nasa.gov/workshop_2010/day3/Ian_Mitchell/Rendezvous_and_ProxOps_IMitchell.pdf.
[19]Souza C D,Hanak F C,Spehar P,Clark F D,Jackson M.Orion Rendezvous, Proximity Operations, and Docking Design and Analysis,AIAA 2007-6683[R].Washington:AIAA,2007.
[20]Amin N,Anderson D,Casperson M,Ciffone M,Cruce M,Day M,Wallace A,Wayer J.BlackSky Transit Systems Final Design Report.BlackSky Transit Systems[R/OL].[2011-06-02].courses.engr.illinois.edu/AE441-S/files/FDR/BlackSky%20FDR.pdf.
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:06
军事文摘(2023年12期)2023-06-12 07:52:00
汽车实用技术(2022年15期)2022-08-19 02:48:32
中国信息化(2022年5期)2022-06-13 11:12:49
趣味(数学)(2021年12期)2021-04-19 13:43:42
当代水产(2019年1期)2019-05-16 02:41:10
北京航空航天大学学报(2016年6期)2016-11-16 01:50:49
太空探索(2016年9期)2016-07-12 09:59:53
电子设计工程(2014年19期)2014-02-27 12:00:54
科学24小时(2011年1期)2011-11-08 08:43:06
