
操纵面作动对无尾布局无人机纵向气动特性的影响
2012-11-15 07:02:40冯立好王晋军巴玉龙
实验流体力学 2012年2期
冯立好,王晋军,巴玉龙
(北京航空航天大学 流体力学研究所,北京 100191)
0 引 言
无尾布局正成为飞行器先进气动布局的一种发展趋势。与常规布局相比,无尾布局取消了传统平尾以及垂尾,减小了全机重量;气动效率较高,具有更高的升力系数和升阻比;大幅减小了雷达散射截面,隐身性能得到极大提高。但是无尾布局由于取消了平尾、垂尾等操纵面,飞机的操控效率有所下降,这就要求无尾布局飞机采用升降副翼、襟副翼和开裂式阻力方向舵等多组操纵面提高操纵效率[1-2]。
美国在无尾布局飞机方面的研究积累了重要经验,尤其是1993年后针对高机动无尾布局飞机进行的“创新控制装置(ICE)”项目研究使得人们对多操纵面布局以及配合等问题有了更加深入的认识。ICE项目分为两个阶段,第一阶段总体评估无尾飞机的重量、结构、机动性、雷达信号和飞控系统的综合性能;第二阶段对最有前景的控制装置进行风洞实验和计算分析,主要包括全动翼尖、差动前缘襟翼、嵌入面和展开式方向舵等[3-4]。Segawa等[5]利用机翼后缘多段副翼控制无尾布局飞机滚转,指出多段副翼组合带来的诱导阻力比常规襟副翼作动低得多。Gillard等[6]通过风洞实验研究表明,全动翼尖在大迎角阶段仍具有良好的偏航控制能力,并且其偏转所产生的偏航力矩基本不随侧滑角的变化而改变。
国内若干单位同样对无尾布局的气动特性及其控制问题进行了相关研究,并且取得了初步的成果。杨广珺[7]针对大展弦比无尾飞翼布局的气动设计特点,提出了复合式舵面和开裂式舵面相结合的气动舵面设计方案,并且分析了各种操纵面实现操纵控制的能力及存在的问题。马超等[8]介绍了无尾飞翼布局采用升降副翼和开裂式方向舵等新型操纵面的气动特点,并且在计算气动特性的基础上分析了三轴控制效率。李林等[9]进一步采用开裂式方向舵和多组升降副翼组合实现滚转和偏航操纵,研究结果表明单发失效对偏航操纵效能要求最高,需要适当增加开裂式方向舵的舵容量或对现有布局进行改进设计。左林玄等[10]利用全动翼尖对无尾飞翼布局进行控制,通过风洞测力实验指出全动翼尖向上作动时将增加飞机的阻力,降低全机的最大升阻比,产生抬头力矩;全动翼尖单侧作动可以在升力系数基本保持不变的条件下提供偏航力矩,但同时也伴随着较大的滚转力矩和俯仰力矩。冯立好等[11]通过风洞测力实验研究分析了副翼、襟翼、全动翼尖单独作动以及联合作动对无尾布局无人机横航向气动特性的影响。
无尾布局纵向稳定性及其控制比常规布局更加困难。以某多操纵面无尾布局无人机为主体,通过风洞测力实验,研究不同操纵面作动对飞机纵向气动特性的影响。
1 实验模型和方法
飞机模型平面示意图如图1所示。全机通过所选翼型放样生成,各部件均平滑过渡,其表面为光滑曲面。模型采用一体化设计加工成型,表面经过电击处理,模型材料采用硬铝,型号为LY12CZ。全机设计6对操纵面,依次为升降副翼N1和N2,襟副翼N3和N4,全动翼尖N5以及鸭翼N6。操纵面均可以沿其轴线偏转作动,操纵面后缘向下偏转为正,向上偏转为负。
测力实验在北京航空航天大学D1低速风洞中进行,该风洞为开口式回流风洞。试验段全长1.45m,扩散角约5°,截面呈椭圆形,进口尺寸为1.02m×0.76m,出口尺寸为1.07m×0.81m,湍流度ε<0.3%,最大可用风速为50m/s。实验中基于机身特征长度的雷诺数为6.5×105。实验模型的气动力用一台六分量杆式应变天平测定,量程10kg,精度为3%。模型采用尾撑,并且保证天平力矩分解中心与模型重心重合,请参见图1模型中轴线上黑色圆圈所标示。
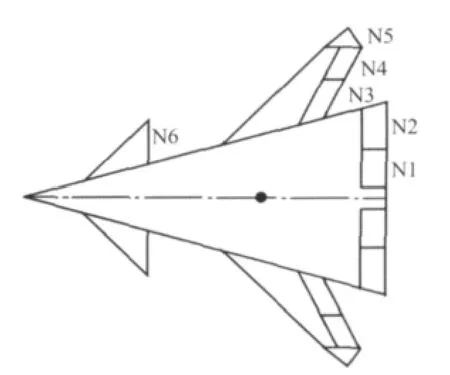
图1 无人机模型平面示意图Fig.1 Sketch of UAV model
2 结果分析
2.1 升力特性
图2给出了操纵面作动对无人机升力系数CL的影响,图示中“N1+N2”和“N3+N4”分别表示升降副翼N1、N2组合以及襟副翼N3、N4组合,下文图中的命名规则相同。图2(a)所示为升降副翼N1、N2组合以及襟副翼N3、N4组合作动情况,在失速之前的线性段,操纵面正向偏转都会使全机升力系数增加,舵偏角度越大升力系数增量越大,并且升降副翼作动的增升效果要高于襟副翼作动。操纵面没有作动时的失速迎角为32°,操纵面作动时的失速迎角在30°到34°之间。升降副翼舵偏δ=10°、20°、30°时,最大升力系数CLmax分别增加9.4%、10.5%、13.0%,襟副翼舵偏δ=10°、20°、30°时,CLmax分别增加3.5%、2.6%和3.0%。无人机失速以后,随着迎角增加,操纵面作动引起的升力系数增量逐渐变小。
如图2(b)所示,相对于升降副翼和襟副翼,全动翼尖作动对升力系数影响不大,增升效果最好的是舵偏δ=20°时,最大升力系数仅增加3.2%。
图2(c)给出了鸭翼作动对升力系数的影响,在α<20°的线性段,鸭翼作动时全机升力系数基本没有变化;在α>20°时,鸭翼作动使得升力系数减小,正向偏转引起的升力系数减小量要高于负向偏转,并且舵偏角越大升力系数越小。
2.2 阻力特性
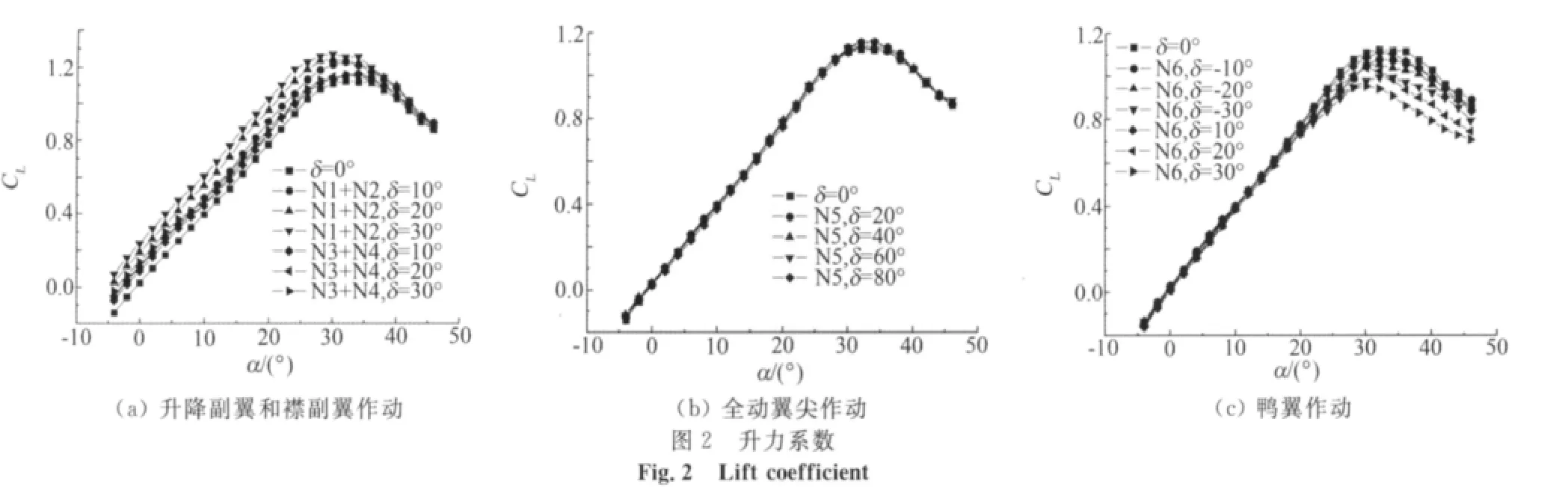
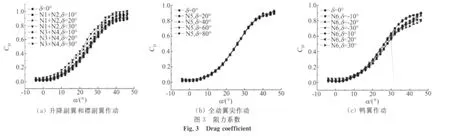
图3给出了阻力系数CD的变化。如图3(a)所示,升降副翼N1、N2组合以及襟副翼N3、N4组合作动均会带来阻力系数的增加,升降副翼偏转引起的阻力增量高于襟副翼偏转情况,并且舵偏角越大,阻力增量越大。图3(b)表明全动翼尖作动对阻力系数影响不明显。图3(c)给出了鸭翼作动情况,当α<10°时,鸭翼偏转引起全机阻力增加;α>20°时,使得阻力系数减小,正向偏转的减阻效果好于负向偏转,并且偏转角度越大减阻效果越明显。
2.3 升阻比特性
图4给出了升阻比系数CL/CD的变化。如图4(a)所示,α<2°时,升降副翼和襟副翼作动都会使得全机升阻比增加。操纵面没有作动时,升阻比在α=4°时达到最大值,襟副翼偏转10°和20°时最大升阻比分别增加0.4%和13.4%,其它情况最大升阻比均减小。α>20°时,所有实验工况下的升阻比基本保持一致。如图4(b)所示,全动翼尖作动会使得最大升阻比减小,并且舵偏角越大,最大升阻比越小,δ=80°时甚至减小50.6%。图4(c)给出了鸭翼作动的影响,与无舵偏相比,δ=-10°时最大升阻比增加21.6%,其它工况下最大升阻比均是减小的,并且舵偏角度越大,最大升阻比越小。
2.4 俯仰特性
图5给出了俯仰力矩系数Cm变化。如图5(a)所示,操纵面没有作动时,飞机表现为负的俯仰力矩,亦即低头力矩,并且失速之前迎角越大低头力矩越大。升降副翼N1和N2组合以及襟副翼N3和N4组合正向作动都使得全机低头力矩增加,升降副翼作动引起的低头力矩增加值要高于襟副翼作动,并且舵偏角越大,低头力矩越大,N1和N2组合作动δ=30°时,整个迎角范围内低头力矩系数增加约为0.2。如图5(b)所示,全动翼尖作动对俯仰力矩基本没有影响。图5(c)为鸭翼作动情况,当α<16°以及α>38°时,鸭翼正向作动使得低头力矩减小,负向作动使得低头力矩增加;22°<α<32°时,鸭翼正向和负向作动都使得低头力矩减小。并且舵偏角度越大,低头力矩增量越明显。
2.5 控制效率分析
图6给出了俯仰力矩系数Cm随操纵面作动角度δ的变化。如图6(a)所示,俯仰力矩系数随升降副翼以及襟副翼偏转角度变化呈线性规律,随着舵偏角度的增大,低头力矩增加,并且升降副翼作动时俯仰力矩曲线的斜率高于襟副翼作动,说明前者对俯仰力矩的控制效率高于后者。在线性段,相同操纵面在不同迎角下的俯仰力矩曲线近似平行,说明控制效率随迎角变化不大。图6(b)中全动翼尖作动时俯仰力矩系数基本没有变化。图6(c)给出了鸭翼作动情况,鸭翼负向偏转时低头力矩系数变化较小,正向偏转时低头力矩系数随偏转角度的增加稍有减小。

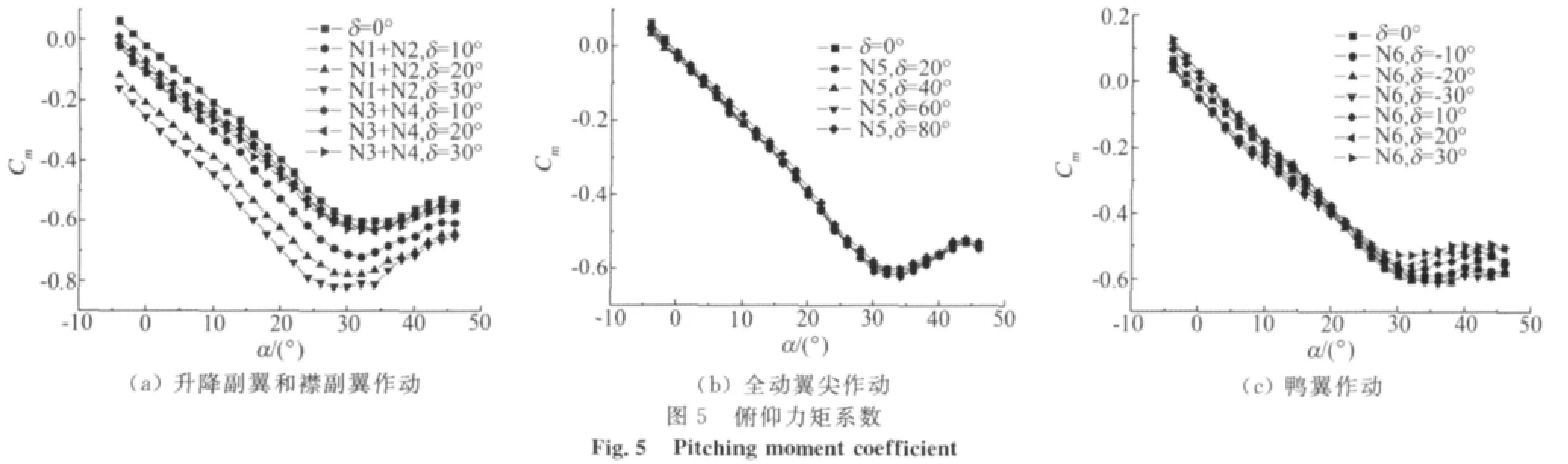
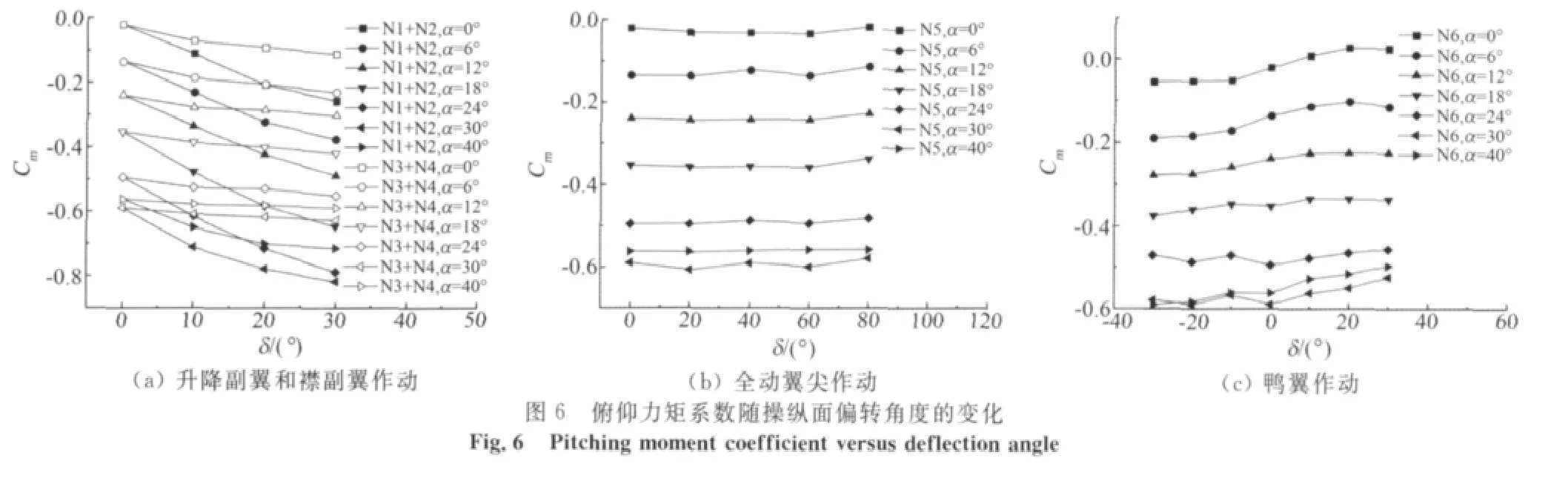
表1统计了操纵面作动对俯仰力矩系数的控制效率。在线性段,升降副翼N1、N2组合偏转时俯仰力矩的控制效率在-8.09×10-3/°~-9.85×10-3/°之间,N3、N4组合的控制效率在-1.72×10-3/°~-3.07×10-3/°之间,全动翼尖作动的控制效率比 N1、N2组合低接近两个数量级,鸭翼作动控制效率比全动翼尖稍有增加,在0.42×10-3/°~1.57×10-3/°之间。线性段以后随着迎角增加,升降副翼、襟副翼和全动翼尖的控制效率都减小,而鸭翼的控制效率是增加的。借鉴常规布局飞机尾容量系数的定义,同样得到不同操纵面的舵容量系数[8],亦即操纵面面积与力臂之积除以全机面积与气动弦长之积。升降副翼N1、N2组合舵容量系数为0.18,襟副翼N3、N4组合为0.04,全动翼尖N5为0.02,鸭翼N6为0.09。因此操纵面控制效率与舵容量系数存在较大关系,基本趋势是随着舵容量系数的增大而增大。
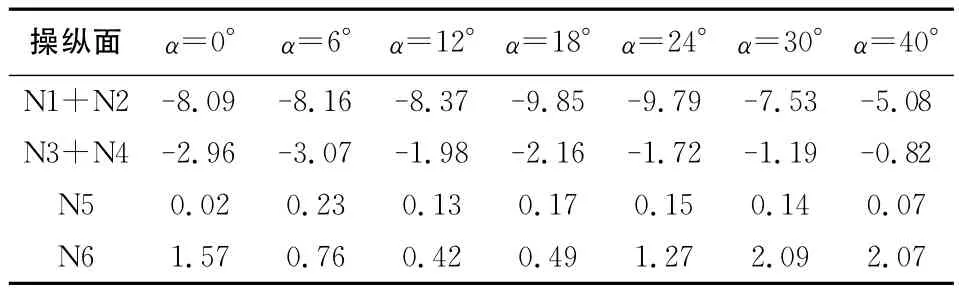
表1 操纵面作动对俯仰力矩系数的控制效率(10-3/°)Table1 Control efficiency of pitching moment coefficient by control surfaces deflection (10-3/°)
3 结 论
通过风洞测力实验,研究了不同操纵面作动对无尾布局无人机纵向气动特性的影响,得到以下主要结论:
(1)升降副翼N1、N2组合以及襟副翼N3、N4组合正向偏转均使得全机升力系数、阻力系数以及低头力矩增加,升降副翼作动引起的增量要高于襟副翼作动,并且舵偏角度越大增量越大;
(2)全动翼尖作动对全机纵向气动特性基本没有影响;
(3)α<16°以及α>38°时,鸭翼正向作动使得低头力矩减小,负向作动使得低头力矩增加;22°<α<32°时,鸭翼正向和负向作动都会使得低头力矩减小;
(4)比较不同操纵面作动对俯仰力矩的控制效率,由高到低依次为:升降副翼、襟副翼、鸭翼和全动翼尖。分析表明不同操纵面的控制效率与其舵容量系数存在较大的关系。
[1] TOURNES C,SHTESSEL Y B.Sliding mode control for tailless aircraft[R].AIAA 97-3633.
[2] BOWLUS J A,MULTHOPP D,BANDA S S.Challenges and opportunities in tailless aircraft stability and control[R].AIAA 97-3830.
[3] DORSETT K M,MEHL D R.Innovative control effectors(ICE)[R].WL-TR-96-3043,1996.
[4] GILLARD W J.Innovative control effectors(configuration 101)dynamic wind tunnel test report rotary balance and forced oscillation tests[R].Ohio United States:Air Force Research Laboratory (AFRL/VAAD),AFRLVA-WP-TP-1998-3043,1998.
[5] SEGAWA H,GOPALARATHNAM A.Optimum flap angles for roll control on wings with multiple trailingedge flaps[R].AIAA 2008-0319.
[6] GILLARD W J,DORSETT K M.Directional control for tailless aircraft using all moving wing tips[R].AIAA 97-3487.
[7] 杨广珺.大展弦比无尾布局复合式舵面概念设计[D].西安:西北工业大学,2005.
[8] 马超,李林,王立新.大展弦比飞翼布局飞机新型操纵面设计[J].北京航空航天大学学报,2007,33(2):149-153.
[9] 李林,马超,王立新.大展弦比飞翼构型的横航向操纵特性[J].北京航空航天大学学报,2007,33(10):1186-1190.
[10] 左林玄,王晋军.全动翼尖对无尾飞翼布局飞机气动特性影响的实验研究[J].空气动力学学报,2010,28(2):132-137.
[11] 冯立好,王晋军,于东升.多操纵面无尾布局飞机横航向控制[J].北京航空航天大学学报,2010,36(9):1038-1042.
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
智能制造(2021年4期)2021-11-04 08:54:42
中国民航大学学报(2021年4期)2021-09-26 01:03:36
装备制造技术(2020年1期)2020-12-25 05:18:18
民用飞机设计与研究(2020年1期)2020-05-21 07:24:44
空间科学学报(2020年4期)2020-04-22 01:17:20
北京航空航天大学学报(2017年3期)2017-11-23 05:14:23
实验流体力学(2017年5期)2017-11-07 10:06:35
中国科技信息(2016年14期)2016-07-31 21:16:55
北京航空航天大学学报(2016年4期)2016-02-27 06:32:19
