
一种变时间常数自动增益控制环路与算法设计
2012-11-05 06:42:58许志鹏
电子测试 2012年6期
许志鹏,余 剑
(电子工程学院, 合肥 230037)
0 引言
AGC系统广泛应用于通信、雷达、导航等接收机中[1-3]。AGC系统由可控增益放大器与控制电路组成[4]。而据文献[5]的推导,对于时间常数恒定的AGC系统,一旦电路中的参数确定,则系统对输入的响应时间确定,不随输入信号的大小改变而改变。如90%、95%、98%稳定时间[6-7]分别对应 2.3τ、3τ、3.9τ(τ为系统的时间常数)。如果τ较小,即AGC系统响应较快的话,系统对干扰脉冲能起到明显的削弱作用,但是此时对有用的低电平信号又将产生不可避免的反调制失真;如果τ较大,即AGC系统响应较慢的话,系统的反调制失真虽小,但是对大信号来不及响应,这又容易造成接收机阻塞[8]。
针对恒定时间常数的AGC系统的不足,本文设计了一种变时间常数的AGC系统,使得在输入信号较大时系统能够快速响应,使输出迅速达到稳定值,防止接收机阻塞;当有用的小信号进入时,使输出缓慢变化,从而减小反调制失真。推导过程与仿真结果均表明,本文提出的方法能够达成这两个目的,在一定程度上克服恒定时间常数AGC系统的不足。
1 AGC系统架构
本文提出的基于对数模型的AGC架构如图1所示, 受控放大器的放大特性为:
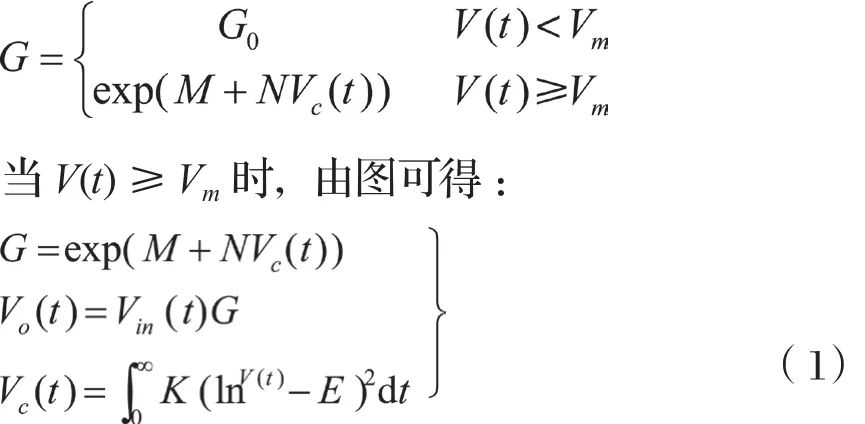
式中Vin(t)、Vo(t)分别为系统的输入与输出信号,V(t)为输出信号的包络,M、N、K、E均为常数。
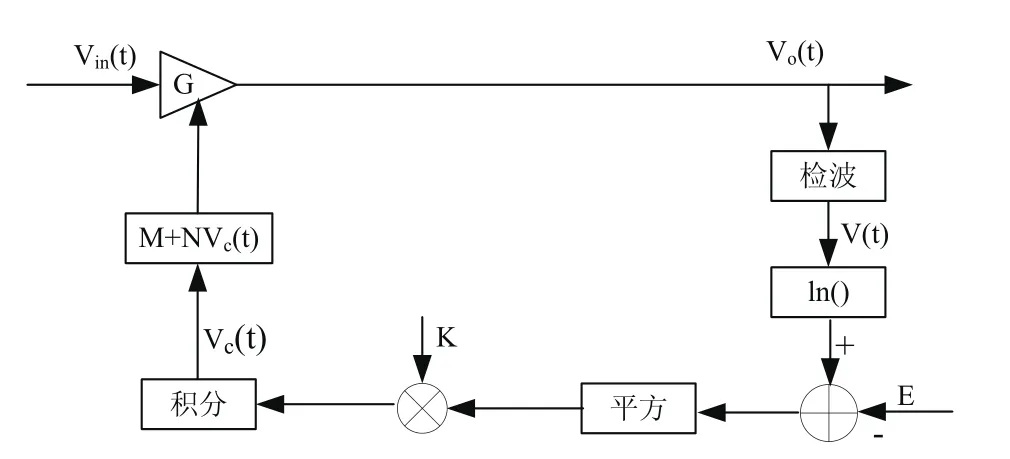
图1 AGC架构图
2 系统分析
2.1 系统稳定性证明
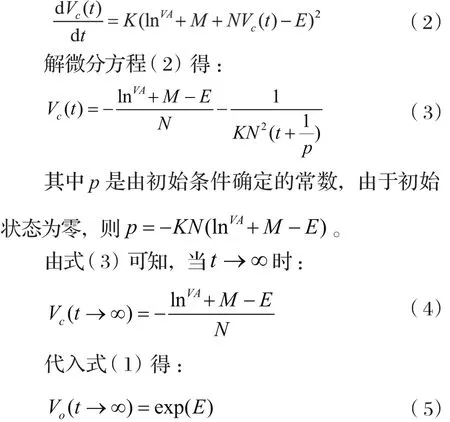
由式(4)、(5)可知,该系统是稳定的。
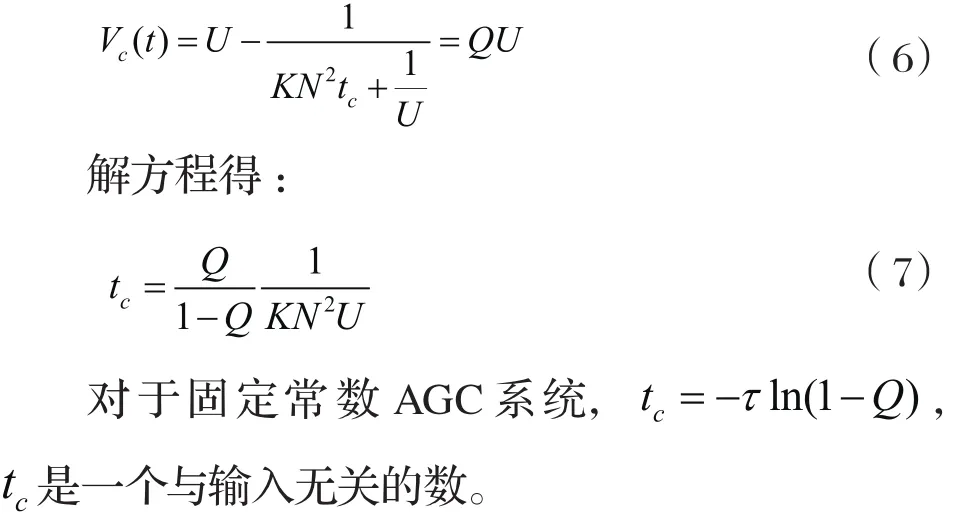
2.2 控制电压Vc(t)的上升规律
Vc(t)的上升时间亦即响应时间tc,是指Vc(t)上升到稳定值的Q(Q为介于0与1之间的常数)倍所需要的时间[3]。
2.3 Vo(t)的下降规律
由(1)和(3)可得:

3 仿真验证
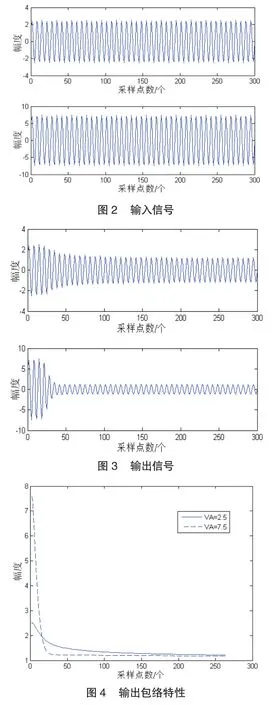
令M=0,N=-0.3,K=1 000,E=0.1, 则为VA=2.5,VA=7.5 的两个等幅正弦信号 (如图 2所示)进行处理,其输出值分别对应于图3中上下图。
图4所示为图3中输出信号的包络,由图可以明显看出,VA=7.5时,输出信号下降迅速,很快就达到稳定值;VA=2.5时,输出信号变化缓慢,输出值达到稳定值的速度明显慢于VA=7.5时输出信号达到稳定值的速度。
4 结论
本文设计并实现了一种使得AGC环路时间常数可变的算法,输入信号电平越大响应速度越快,使得输出值迅速降下来,接收机不至于饱和;相反,输入信号电平越小响应速度越慢,使得输出值缓慢变化,减小了反调制失真。具有恒定时间常数AGC系统所不具备的优点,对AGC设计人员具有一定的帮助。
[1] ELWAN H O,ISMAIL M.Digitally programmable decibel—linear CMOS VGA for low-power mixed-signal applications[J].IEEE Transactions on Circuits and Systems-II Analog and Digital Signal Processing, IEEE,2000,47(5):388-398.
[2] SAHOTA G S PERSICO C J. High Dynamic range variable-gain amplifier for CDMA wireless applications[C]//International Solid-State Circuits Conference,IEEE,1997:374-375.
[3] 袁孝康.自动增益控制与对数放大器[M].北京:国防工业出版社,1987.
[4] 李学初,高清运,秦世才.混合模式AGC设计[J].电子与信息学报,2007,29(11):2791-2794.
[5] 毕无敌,张洪军.自动增益控制(AGC)电路特性研究[J].山东师大学报,1993,41(8):31-35.
[6] 张立志,饶龙记,邬江兴.自动增益控制环路方程的一种简化处理方法及环路稳定时间分析[J].通信学报,2005, 26(6):94-99.
[7] 彭晓霜,杨志敏,李式巨.对数自动增益控制环路全数字实现[J].浙江大学学报:工学版,2009,43(11):1966-1969.
[8] 龙德浩.一个变时间常数的自动增益控制电路[J].电子学报,1981(03).
猜你喜欢
电子设计工程(2022年15期)2022-08-17 10:07:16
光通信研究(2020年2期)2020-06-15 07:42:58
小资CHIC!ELEGANCE(2019年40期)2019-12-10 09:12:42
重型机械(2019年3期)2019-08-27 00:58:52
科技创新与应用(2019年17期)2019-06-09 08:38:29
小小艺术家(2017年8期)2018-01-26 13:15:10
物探化探计算技术(2014年1期)2014-06-27 01:32:50
机械制造与自动化(2014年1期)2014-03-01 04:21:41
电气电子教学学报(2013年1期)2013-07-05 09:41:14
微特电机(2012年9期)2012-03-19 14:12:55
