
基于光学测量手段实时动态测量船体水平姿态
2012-10-30 08:48马庆坤乔彦峰王晓明高慧斌安雪晶
中国光学 2012年2期
马庆坤,乔彦峰 ,王晓明,高慧斌,安雪晶
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春130033;2.中国科学院 研究生院,北京100039; 3.辽宁机电职业技术学院 信息工程系,辽宁,丹东118009)
1 引 言
远洋航天测量船作为移动式海上测控站,在我国已经具有30 年的应用历史,期间船载各类设备都经过了多次更新换代。随着卫星全球导航技术的发展、电视白天测星能力的提高、静电陀螺监控器的应用及设备综合标校技术的进步,基于惯性导航技术的船位船姿测量系统作为全船的精度基准,其导航的位置精度、航向精度都已有了很大提高,但是如何为远洋航天测量船建立动态实时精密的水平测量基准,一直是困扰人们的技术难题。
测量船在运动状态下主要包括3 个状态变化:位置平移( 前后、左右、上下) 、姿态旋转( 航向、纵摇、横摇) 、结构变形( 艏挠、纵挠、横扭) ,其中纵摇、横摇、纵挠、横扭4 个分量与水平有关。其在坞内静态情况下,以大地水平作为标校基准,在水上船摇情况下,以惯导水平姿态数据作为水平参考基准。
目前,国内静态环境水平测量主要依赖各类水平( 倾角) 测量仪器,虽然测量精度很高( 误差≤1.0″) ,但都只适合于静态测量环境。动态环境水平测量主要依赖各种惯性测量元件,虽然适合动态环境使用,但其测量精度普遍不高( 误差≥10.0″) 。
本文参照冯小勇2009 年申请的发明专利[1],提出了以当地大地水平作为绝对水平参考标准的单测量点水平测量体制。采用“光学编码精密测角+惯性同步复示平台+水平误差检测工具”的设计方案,用光学编码精密测角法测量被检基面与惯性同步复示平台之间的夹角,用水平误差检测工具测量惯性同步复示平台与大地水平之间的夹角。
2 工作原理与系统设计
本方案以运动载体( 远望测量船) 惯导系统的50 Hz 船姿数据(R、P) 为引导源,采用24 位光电轴角编码器为测角反馈器件,取大地水平位置作为基准,通过精密的光机电系统进行实时水平度测量[2],很好地解决了运动载体实时精密水平测量的相关问题。
2.1 工作原理
在实际工作过程中,探测装置通过安装基座与被检基面( 惯导机座、雷达机座、船体甲板等)连接,水平误差检测工具安装在复示平台上,在复示平台纵轴两端和横轴两端分别装有驱动电机与测角元件。平台水平误差检测工具是保证系统总体测量精度是否满足要求的关键部件。
本方案将实时自准直测微平行光管作为平台水平误差检测工具,并将自准直测微平行光管光轴方向竖直向下安装在惯性同步复示平台上。利用从自准直测微平行光管像面处安装的面阵CCD 采集到的图像,实时检测被检基准平面处安装的液浮平面反射镜表面( 绝对大地水平基准)反射得到的光管星点像的偏移情况,从而求得复示平台相对于绝对大地水平基准的转角偏移。水平误差检测原理如图1 所示。

图1 水平误差检测原理图Fig.1 Schematic diagram of horizontal error detection
2.2 光机系统设计
探测装置主要由惯性同步复示平台和水平误差检测工具两部分组成,如图2 所示。
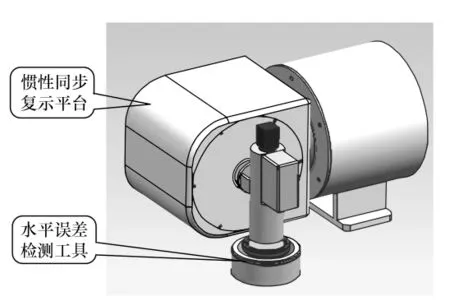
图2 探测装置三维示意图Fig.2 Three-dimensional diagram of detection devices
惯性同步复示平台是系统跟踪目标的执行机构,主要完成设备视轴指向的精密测量;复示平台由垂直相交的纵摇轴系和横摇轴系组成,纵摇轴和横摇轴上分别装有精密21 位绝对式轴角编码器和力矩电机,如图3 所示。

图3 复式平台三维布局示意图Fig. 3 Schematic three-dimensional layout of duplex platform
水平误差检测工具是测量惯性同步复示平台水平倾斜量的精密检测机构,主要由自准直测微平行光管[3]、液浮水银反射镜和电动置中拨叉等部分组成,整体安装于惯性同步复示平台之上,如图4 所示。
将实时自准直测微平行光管作为平台水平误差检测工具[4],并将自准直测微平行光管光轴方向竖直向下安装在惯性同步复示平台上。利用从自准直测微平行光管像面处安装的面阵CCD 采集到的图像,实时检测被检基准平面处安装的液浮水银反射镜表面( 绝对大地水平基准) 反射得到的光管星点像的偏移情况,从而求得复示平台相对于绝对大地水平基准的转角偏移。

图4 水平误差检测工具三维模型图Fig.4 Three-dimensional model horizontal error detection tool
2.3 电控系统设计
电控系统主要功能为: 实时接收惯导系统船姿数据,以此数据为引导源驱动复式平台的方位、俯仰电机进行数引跟踪;同时,图像处理系统实时(20 Hz) 采集目标图像、提取脱靶量信息,经滤波等处理后转化成水平误差信息,实时发往惯导系统,进行实时船姿数据修正。
电控系统完全采用货架产品,分系统即不同板卡之间的供电、通讯、同步通过PXI( PCI eXtensions for Instrumentation) 总线来进行[5],因而电磁兼容性好、结构简洁紧凑、易扩展、易安装、易维护[6]。电控系统集成后的外观如图5 所示。

图5 电控系统外观图Fig.5 Appearance of electric control system
3 实验过程及结果分析
3.1 实验过程
电控系统通过网口接收惯性导航系统的姿态数据( 纵摇ψ、横摇θ) 作为复示平台的实时引导信息[7],通过数据总线发送给运动控制卡,驱动两轴电机,使复示平台同步跟踪惯性平台。CCD相机实时采集图像( 10 Hz) ,发往电控机箱的图像处理卡,通过对图像的实时判读,提取脱靶量并将其通过总线传给综合控制卡,将数据封包通过网络向外发送,同时将脱靶量数据量化并与编码器数据融合后和接收到的惯导数据同时记录,以便比较。
3.2 结果分析
考虑到测量数据中包含振动、电噪声等干扰[8],首先对测量数据进行快速傅里叶变换( FFT)[9],然后与惯导数据进行比较。横摇曲线比较如图6 所示,纵摇曲线比较如图7 所示。

图6 横摇数据曲线比较Fig.6 Comparison of roll data curves
对测量数据分析可知,测量数据与惯导数据高度契合;在去除船姿数据的模型误差及震动等噪声误差后,将测量值与真值进行比较,解算出测量精度为纵摇5.37″,横摇3.60″,均优于传统惯导系统水平测量精度。因此,本系统测量数据可作为动态实时精密水平测量基准提供给惯导系统进行实时船姿修正,从而提高测量船的整体测量精度。
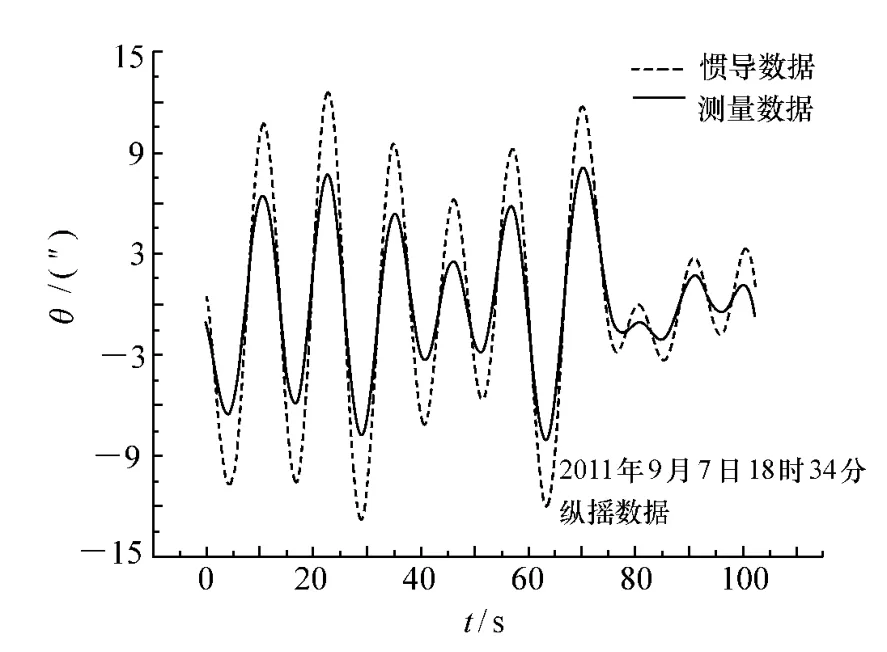
图7 纵摇数据曲线比较Fig.7 Comparison of pitch data curves
4 结 论
本文介绍了通过光学测量手段实时动态测量船体水平姿态的新方法,提出了具体设计方案,并以某型号远洋测量船为平台进行了外场试验。
对实验数据的分析显示,本方案作为一种远洋测量船水平度实时精密测量手段,可以为运动载体( 车载、船载光测设备) 提供高精度实时水平姿态误差;因其与传统惯导系统相比具有更高的测量精度( 纵摇5.37″,横摇3.60″) ,可用于惯导系统水平精度鉴定。
[1] 冯小勇.运动载体实时精密水平测量方法:中国,200910046330.3[P]. 2010-04-21.FENG X Y. Real-time precision horizontal measurement method for motion carrier: CN,200910046330.3[P]. 2010-04-21.( in Chinese)
[2] 张志远,罗国富.舰船姿态坐标变换及稳定补偿分析[J].舰船科学技术,2009,31(4) :34-40.ZHANG ZH Y,LUO G F. Coordinate transformation of warship pose and analysis of stabilization compensation[J].Ship Sci. Technology,2009,31(4) :34-40.( in Chinese)
[3] 杨振,李广云,黄桂平.基于自准直的立方镜姿态测量方法研究[J].宇航计测技术,2010,56(2) :14-17.YANG ZH,LI G Y,HUANG G P. Research on attitude measurement method of cubic prism based on auto-collimation[J].J. Astronautic Metrology and Measurement,2010,56(2) :14-17.( in Chinese)
[4] 黄祥,吴年祥.基于PSD 的光电自准直仪角度测量系统研究[J].制造业自动化,2011,33(11) :39-41.HUANG X,WU N X. The research photoelectric autocllimator angle measurement system based on PSD[J].Manufactur-ing Automation,2011,33(11) :39-41.( in Chinese)
[5] 霍志,刁节涛,李清江.基于PXIE 总线的高速CCD 数字图像采集系统设计[J].现代电子技术,2011,34( 14) :88-92.HUO ZH,DIAO J T,LI Q J. Design of high-speed CCD digital image collecting system based on PXIE bus[J].Modern Electronic Technique,2011,34(14) :88-92.( in Chinese)
[6] 曹晖,毕建峰.基于PXI 总线的实时综合测试系统研究[J].上海航天,2011,38(3) :64-68.CAO H,BI J F. Research of PXI-based real-time integrated measurement system[J].Aerospace Shanghai,2011,38(3) :64-68.( in Chinese)
[7] 宋连龙,陈虹丽.舰船姿态运动的自适应实时预报及其应用[J].船电技术,2005,25(4) :40-42.SONG L L,CHEN H L. Real-time self-adaptive prediction system and its application on ship attitude motion[J].Marine Electric Electronic Technology,2005,25(4) :40-42.( in Chinese)
[8] 易东云,吴孟达.船姿数据的模型误差与噪声误差分析[J].导弹与航天运载技术,1998,232(2) :41-44.YI D Y,WU M D. Analysis for model error and noise error of ship posture data[J].J Missiles and Space Vehicles,1998,232(2) :41-44.( in Chinese)
[9] 王恒,李永刚,陈亮.测量船船摇前馈数据处理方法研究及应用[J].飞行器测控学报,2011,30(2) :64-69.WANG H,LI Y G,CHEN L. Processing of the shaking feedforward data of space instrumentation ships[J].J. Spacecraft TT&C Technology,2011,30(2) :64-69.( in Chinese)
猜你喜欢
光源与照明(2022年3期)2022-08-01
舰船科学技术(2022年10期)2022-06-17
科技尚品(2021年5期)2021-09-10
商品与质量(2020年49期)2020-12-16
导弹与航天运载技术(2018年3期)2018-07-06
北京航空航天大学学报(2018年1期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
中国高新技术企业(2017年2期)2017-03-24
科技创新导报(2014年36期)2015-03-11
计算技术与自动化(2014年1期)2014-12-12
