
基于永磁同步电动机中混沌运动状态观测器的同步控制*
2012-10-23 05:49杨晓辉刘小平柳和生徐少平
制造技术与机床 2012年6期
杨晓辉 刘小平 柳和生 徐少平
(①南昌大学机电工程学院,江西南昌330031;②南昌大学信息工程学院,江西南昌 330031)
永磁同步电动机混沌控制是非线性科学中的一个热门研究领域,1990年,美国物理学家Ott、Grebogi和Yorke[1]提出利用参数微扰法(简称 OGY方法)控制混沌。随后混沌控制研究已经涌现了大量的混沌控制方法,常用的控制方法有强迫迁徙法[2]、自适应控制、延时反馈控制[3-4]等。
永磁同步电动机是一种典型的多变量、强耦合非线性系统,在某些参数及工作条件下会呈现混沌行为[5],主要表现为转矩和转速的间歇振荡、系统不规则的电磁噪声等。这些不规则运动严重影响着系统的稳定运行,如何对永磁同步电动机系统中的混沌行为进行控制已成为关注的焦点。首先对永磁同步电动机的数学模型进行了精确线性化,然后利用相应的技术将其控制到平衡点,然而此方法较为复杂,使得物理实现较为困难[7]。给出了一种基于Washout滤波技术的永磁同步电动机混沌控制方法,但这种方法的控制代价较大[8]。
本文基于永磁同步电机中混沌运动的同步状态反馈控制,设计了一种具有最简形式的同步状态反馈控制器,实现了永磁同步电动机中的混沌同步控制。
1 永磁同步电动机数学模型及其数字仿真
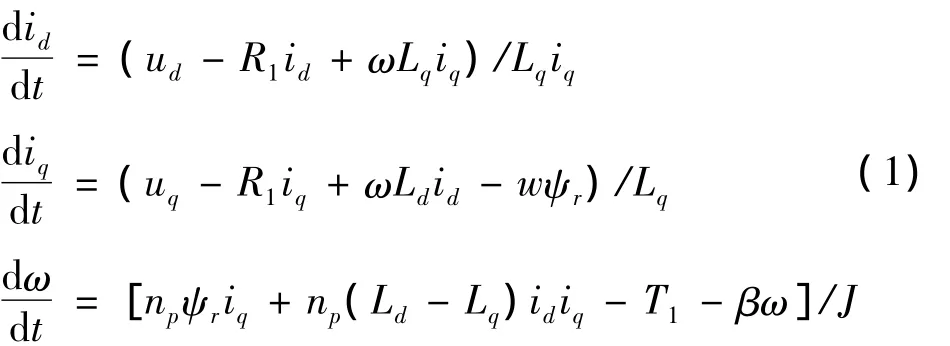
id、iq、ω为系统状态变量,分别表示d轴定子电流、q轴定子电流和转子机械角速度ω,永磁同步电动机的数学模型可以写为
上述模型经过仿射和时间尺度变换后的均匀气隙永磁同步电动机数学模型为
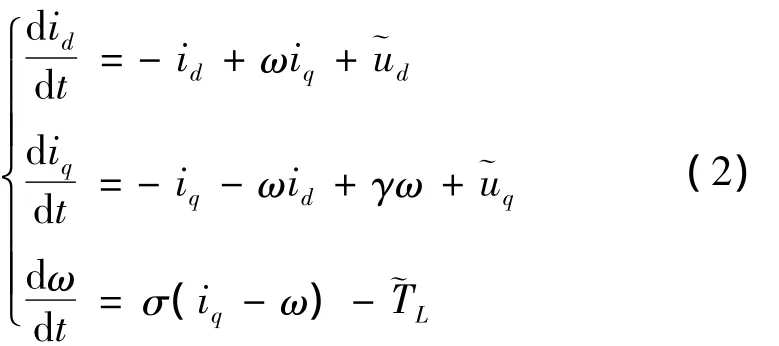
式中:id、iq、ω为系统状态变量,分别表示d轴定子电流、q轴定子电流和转子机械角速度;~ud、~uq和~TL分别为d、q轴定子电压和负载扭矩;γ、σ为系统参数。
一般地,我们考虑电动机系统没有外力的情形。这时可以看作是永磁同步电动机空载运行一段时间后突然断电,各外部输入项为零的情形,即~ud=0,~uq=0和~TL=0。此时式(2)系统可表述为

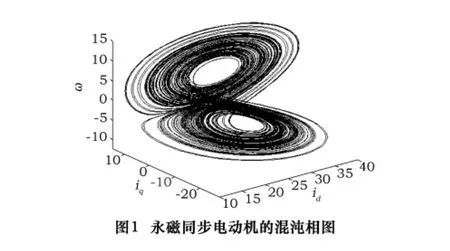
当 σ =5.45,γ 分别为16、20、100,式(3)系统存在不同的参数下呈现不同的动态行为。此时永磁同步电动机表现为混沌行为,其典型混沌吸引子如图1所示。混沌的存在将严重破坏永磁同步电动机的稳定运行,甚至会引起传动系统的崩溃。所以,必须抑制永磁同步电动机的混沌运动。
2 状态观测器法控制器的设计
式(3)系统可以被改写为式(4)系统的第一行的形式为

式中:x是系统状态变量;A和B是已知的定常矩阵;D是系统的常数项;w是驱动系统的输出;K是要求的反馈增益矩阵。比较式(3)与式(4),可得到系统参数为

取
根据式(4)系统可设计其状态观测器为

式中:y是状态观测器的状态变量;v是状态观测器的输出;D是系统的常数项。
定义式(4)和(5)系统的误差矢量为

对式(6)求导,再将式(5)与式(4)代入,得到如下的动力学误差系统为

令M=A-BK,则
如果对角矩阵K满足条件λi≤0,其中λi是矩阵M的特征值,则式(7)的状态向量渐近收敛到零,即式(4)驱动系统和式(5)响应系统渐近同步。通过解微分方程=Me,得

下面我们利用极点配置法来求增益矩阵K。式(1)系统不稳定平衡点为x0=[0.8,0.6,0.2],得到受控闭环系统在不稳定平衡点x0的Jacobi矩阵为
通过配置,可得到相应的K值。我们希望系统能够满足综合指标为:输出超调量σp≤5%;超调时间tp≤0.5 s,系统频宽 ~ω≤10。,选其中一对主极点,另一个远极点,可取希望的极点为s1,2= -7 ±3j,s3= -11,所以可以构成特征多项式,从而得到我们的a11、a22、a33,则可得到为
3 仿真结果分析
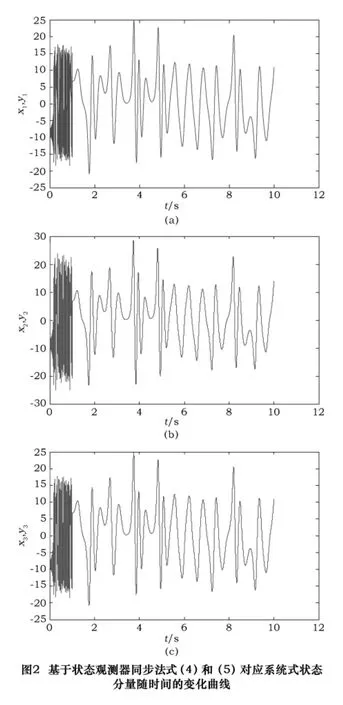

利用MATLAB软件对以上得出的数据进行数值模拟,利用四阶Runge-Kutta算法检验式(4)驱动系统与它的式(5)状态观测器是否达到同步。取步长为τ=0.001,式(4)驱动系统及其式(5)状态观测器的初始值为:x1(0)=0.8,x2(0)=0.6,x3(0)=0.2以及y1(0)=0.6,y2(0)=4.1,y3(0)=3.1;由误差计算公式e=y-x可得初始误差为:e1= -0.2,e2= -3.5,e3=2.9。图2显示了驱动-响应系统的对应状态分量随时间变化的曲线。图3为误差系统分量e1、e2和e3随时间变化的曲线。从图2和图3可以看出,利用设计的增益矩阵K,很快实现了式(4)驱动系统和其状态观测器之间的同步。同时还可得出结论:对J取不同的值,通过极点配置法,可以得到多种增益矩阵K,即可设计多种状态控制器,而且可以看到系统的动态响应特性完全符合期望的综合指标要求。这说明基于状态观测器的同步法非常灵活,方便,具有很多优点。
4 结语
本文基于状态观测器的同步控制,实现了永磁同步电动机中的混沌控制。并且通过对极点配置来得到状态观测器进行同步控制,该控制器结构具有最简形式,控制代价小,易于工程实现。另外,该控制器可以施加在状态方程的任何一项上,所以控制方案实施起来很灵活。仿真结果表明了该方法的有效性,具有较高的应用价值。
[1]Ott E,Grebogi C,Yorke J A.Controlling chaos[J].Phys.Rev.Lett,1990,64:1196 -1199.
[2]李忠,张波,毛宗源,等.永磁同步电动机系统的纳入轨道和强迫迁徒控制[J].控制理论与应用,2002,11(1):53 -56.
[3]李俊,陈基和,邹国棠.永磁直流电机的混沌反馈控制[J].中国电机工程学报,2006,26(8):77 -81.
[4]张兴华,王德明.无刷直流电机混沌系统状态反馈控制仿真研究[J].微电机,2009,42(11),82 -85.
[5]张波,李忠,毛宗源,等.一类永磁同步电动机混沌模型与崔夫分叉[J].国电机工程学报,2001,21(9):13 -17.
[6]朱少平,钱富才,刘丁.不确定动态混沌系统的最优控制[J].物理学报,2010,59(4):2250 -2255.
[7]韦笃取,罗晓曙.基于LaSalle不变集定理自适应控制永磁同步电动机的混沌运动[J].物理学报,2009,58(9):6026 -6029.
[8]李春来.永磁同步电动机中基于冲洗滤波技术的混沌控制研究[J].物理学报,2009,58(12):8134 -8138.
猜你喜欢
数字技术与应用(2021年2期)2021-04-22
湖南大学学报·自然科学版(2021年1期)2021-02-21
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
智能计算机与应用(2020年10期)2020-03-18
北京航空航天大学学报(2017年6期)2017-11-23
制造技术与机床(2017年2期)2017-05-04
电子制作(2017年24期)2017-02-02
导弹与航天运载技术(2016年2期)2016-10-14
舰船科学技术(2015年8期)2015-02-27
