
水声对抗装备模块化仿真
2012-10-20 06:57:58张永峰王红萍
舰船科学技术 2012年2期
张永峰,王红萍,曲 丰
(91388部队,广东 湛江 524022)
0 引言
近年来,水声对抗装备在对抗作战中的重要地位受到研究人员的高度重视[1]。基于不同的需求,诸多单位都对水声对抗装备建模展开了研究,并利用仿真方法对装备的各项性能进行评估,以满足装备研制生产、试验鉴定以及作战训练模拟的需求。由于水声对抗装备模型的建立大多是基于具体型号,各单位在仿真中对模块的复用性重视不够,建模不规范,模型的通用化程度不高,致使同一个单位的研究人员也很难实现模块及资源共享。本文在分析、归类和整理了不同类型对抗装备的性能特点的基础上,依据其工作原理及流程对其进行最小功能化,提取装备共性的部分进行功能模块化;同时,规范对抗装备的内、外部接口关系。通过功能的灵活配置,调用者可按照给定的型号指标配置要求,生成或修改相应的配置文件,对声学和运动学模块进行选择性整合,生成新型号或我国现役主要对抗装备的仿真实体,完成对抗装备声学工作过程及运动方式的仿真。仿真验证表明了该模块化通用设计思想的正确性,在对抗装备的系统化仿真中具有良好的应用前景。
1 水声对抗装备性能分析
1.1 对抗装备分类
水声对抗装备可分为软杀伤装备和硬杀伤装备2类,但按照装备的自身特性可有以下几种分法:
1)按是否发射声波可分为有源和无源2类[2]。有源对抗装备指对抗装备利用自身水声换能器向外发射声波,如噪声干扰器、声诱饵等。无源对抗装备自身不向外发射声波,如气幕弹等。
2)按水声对抗装备的工作原理可分为背景噪声干扰型和信号干扰型[3-4]。背景噪声干扰型对抗装备在鱼雷或声呐工作频段内施放干扰噪声,以降低鱼雷或声呐检测系统的检测性能,如高频/低频干扰器;信号干扰型对抗装备既能模拟舰船辐射噪声、舰船回波信号和鱼雷主动应答信号,又能模拟舰船的机动性能,如潜艇模拟器、声诱饵等。
3)按机动能力可分为悬浮式、拖曳式、自航式和火箭助飞式等[5]。悬浮式对抗装备不具有水平面机动能力,但可以做垂直方向的定深运动;拖曳式对抗装备由舰艇用缆绳拖动航行;自航式对抗装备具有水平和垂直机动能力,可按设定好的机动方案进行机动;火箭助飞式对抗装备借助火箭发动机把对抗装备投送到较远的位置,入水后一般呈现悬浮状态。
由以上分类可看出,水声对抗装备自身特性的3种分类方式可以归纳为2种主要的性质:运动学特性和声学特性。这2种特性是进行模块功能化的基础。
1.2 对抗装备功能分解
基于水声对抗装备的声学特性和运动学特性,可将水声对抗装备模块划分为声学模块和运动学模块[6],如图1 所示。
水声对抗装备的运动学特性模块中,主要归纳为自航式、拖曳式、悬浮式和火箭助飞式4类弹道模型,每类模型中都包括对抗装备的航行方式,各时刻位置坐标、姿态等。对自航式声诱饵,需要确定弹道方式、发射深度、初始转角、航行速度、航行深度等运动参数;对拖曳式诱饵,需要确定放缆长度、布放速度、布放深度、运动规律控制等参数;对于悬浮式水声对抗装备,需要增加漂行速度、上不漂行带的深度等参数;对火箭助飞式对抗装备,需要增加发射方向、布放距离等参数。
在水声对抗装备的声学模块中,需要考虑背景噪声干扰型和信号干扰型对抗装备。背景噪声干扰型对抗装备如噪声干扰器,其性能主要体现在辐射噪声和发射声源级上,可以通过宽带噪声模块(既可产生低频噪声也可产生高频噪声)和发射换能器模块来模拟这种类型对抗装备;信号干扰型对抗装备如声诱饵的性能则可归纳为扫频噪声模块、线谱噪声模块、调制噪声模块、主动回波模块、换能器模块和噪声幅度控制模块。几类模型中,涵盖了通用的对抗装备的工作原理,输入、输出信号,信号处理,干扰噪声发生,舰艇辐射噪声模拟,自导回波模拟等。由于对抗装备种类繁多及对抗方式的多样化,因此在通用化的模型研究中还需要进行频段、声级、回波参数和工作方式等参数的设定。

图1 对抗装备模块划分图Fig.1 Module division graph of underwater acoustic countermeasure equipment
2 对抗装备功能模块灵活配置
2.1 参数的灵活配置
仿真模型是以参数为驱动的。在水声对抗装备的仿真建模过程中,运动方式和声学工作具有多样性和复杂性的特点,为了体现模型的通用性和灵活性,参数数量和性质必然比较复杂。不同的参数在通用性的架构下作用范围和性质也不一样。例如各仿真实体的三维坐标,在程序开始运行前需要设定,即通常所言的发射位置,由于程序在运行过程中,这个参数时刻在改变,需要考虑进去;而如对抗装备的工作时间这类参数,仿真开始前指定以后,在整个仿真过程中就不再变化。因此,必须按照各种参数在仿真过程中的作用来设计其结构并确定其在何种模块中定义的位置。仿真过程中,分别对应不同的配置方法,参数可分为以下3类:
第1类为配置参数。此类参数一般在模型初始化时根据要仿真的对抗装备具体参数设定。这些参数一般只随型号装备改变而不随单个装备或单次仿真改变,即一次设定后可以基本不做改变或改动较少。如调制参数中的螺旋桨调制频率;换能器参数中的发射水平开角、接收水平开角;扫频参数中的扫频周期等。这类型参数可以利用INI格式文件来进行存储配置。INI是微软Windows操作系统中的文件扩展名,为英文Initial的缩写。INI文件常被用来对操作系统或特定程序初始化或进行参数设置。INI文件的书写格式一般为字段名加对应键值的模式。[]里面的内容为1个字段名,后面紧跟键名和键值,赋值采用键名=键值的形式。每个[]及其后面的内容表示1个节,分节储存需要配置的参数。在仿真型号装备时,通过读取配置INI文件,修改文件的内容来更改模型的初始化参数,从而避免修改源程序。
第2类为装订参数。此类参数在每次仿真开始前均需设定,一般需要根据对抗装备个体或具体的仿真来确定,如运动学参数中的三维坐标;拖曳式诱饵要设置的拖缆长度、收放速度等,此类参数可以在发射对抗装备的参数设置对话框中由用户输入,然后传递给对抗装备的构造函数,完成装订参数的初始化功能。
第3类为过程参数。此类参数在仿真过程中会有所改变,它包含部分装订参数,需要在具体的仿真流程设计中把它们考虑进来。如对抗装备的当前工作模式(针对不同工作模式会有不同的运动状态),主动回波参数的当前多普勒频移等。过程参数是在仿真进行中不断变化的,故它们需要实时解算和更新,然后把必要的信息反映在模型参数界面上。如工作状态的变化一方面要实时显示在图形界面上,另一方面将决定仿真流程的走向。因此,这类参数在编程中可利用函数的形参传递,仿真中把实参赋值给形参,完成解算。
2.2 接口关系
2.2.1 灵活配置功能接口
在定制型号的对抗装备仿真研究中,可以通过定制仿真对象的功能及参数,组合特定的声学功能和运动学功能模块,来实现灵活配置的功能。图2为灵活配置功能的接口关系。
调用者通过配置文件或输入参数的形式对水声对抗装备仿真对象的声学及运动学参数进行定制,灵活配置功能模块按声学参数配置和运动学参数配置的要求选定特定的声学模块和运动学模块,并对其进行模块型号的初始化。
2.2.2 对抗装备内部接口
对抗装备内部接口关系包括声学和运动学特性仿真接口,接口内部的声学和运动学数据的交互流程反映了对抗装备的工作过程,内部接口关系见图3。

图3 对抗装备内部接口关系图Fig.3 Internal interface relational graph of countermeasure equipment
声学特性仿真中,噪声发生器生成白噪声,按照待模拟的被动目标的辐射噪声频谱结构、噪声谱级进行调制,生成目标模拟噪声信号;自导信号参数检测模块对接收数据进行检测,提取鱼雷自导信号波形、强度等数据传递给自导回波模拟模块,按待模拟的主动目标回波的目标强度、多普勒、展宽时间进行调制,生成模拟目标回波;扫频信号发生器按待模拟的目标信号扫频周期、频率范围及谱级等参数生成模拟扫频信号。此3类信号通过声学数据输出接口与其他节点进行交互。
运动学特性仿真中,按照灵活配置功能模块选定的弹道模式,防御方将对抗装备的初始方位及初始航速等参数发送给相应的弹道仿真模块,由弹道仿真模块完成对抗装备的运动学特性模拟。
2.2.3 对抗装备外部接口
由于对抗装备的运动特性和声学特性必须与鱼雷、防御方的声学及运动特性等多种参数相互联系,因而,对抗装备模型的验证可以通过对仿真过程和仿真结果进行记录和分析来进行。为此,设置必要的仿真环境进行验证是一种简单有效办法。如图4所示,增设防御方节点、鱼雷自导节点和管理节点,防御方节点以调用者的角色,通过调用灵活配置功能模块,把仿真所需配置参数写入配置文件,完成新型号对抗装备声学参数和运动学参数的定制;鱼雷自导节点与对抗节点相互交换运动参数,基于姿态参数,两节点完成声学参数的解算;管理节点则提供各节点同步运行的时钟节拍,在统一的时空设置下,显示相关节点的声学和运动学参数更新;同时,管理节点将声学仿真结果和运动学仿真结果分别形成输出文件,通过对输出文件并进行相应的图形显示和分析,可以验证对抗装备模型的正确性。
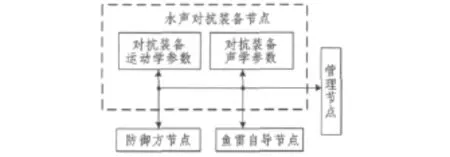
图4 对抗装备外部接口关系Fig.4 Exterior interface relational graph of countermeasure equipment
3 型号对抗装备的仿真实现
3.1 装备仿真结构
仿真研究中,为了考虑通用性的要求,采用C++语言中基类——派生类的关系来构建对抗装备。在设计对抗装备的结构时,考虑到运动特征具有排它性,可以通过总结多种对抗装备的特性,将它们的共性,如对抗器材的初始化运动参数、发射时刻等提取出来,建立1个对抗装备的共性参数基类,根据不同运动方式,从中衍化出派生类——悬浮式、拖曳式、自航式等[6];此外,由于不同的声学工作方式可能在同一种运动方式的对抗装备中共存,所以可以设计多个声学模块类并将其归纳为基类的组成部分:包括宽带噪声类、扫频噪声类、线谱噪声类等。在生成型号对抗装备时,按照型号的参数配置,由对抗装备派生类调用基类声学模块中的一种或几种,利用C++语言中的虚函数重载运动方式,就能实现通用性的设计目的。型号对抗装备仿真对象的总体结构见图5。

图5 对抗装备仿真对象的总体结构Fig.5 Overall structure graph of simulation object for countermeasure equipment
3.2 仿真实现
某型自航式声诱饵可以模拟舰船辐射噪声,利用良好的水平和垂直机动能力,通过应答鱼雷主动寻的信号,来诱骗来袭鱼雷。其声学特性模块可归纳为宽带噪声、回波应答、换能器3个模块,运动特性则为自航式。图6为参数配置模块中的通用声学特性参数配置对话框,可以通过选择或修改配置文件来定制该型号声诱饵的声学及运动学参数。参数配置模块使对抗仿真的外在表现具有了通用性。在这里可以设置运动学和声学所需的各种参数,从而能仿真出理想的各型对抗装备。
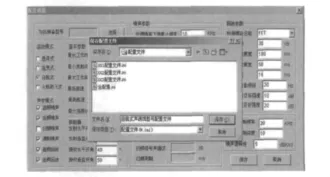
图6 通用声学特性参数配置对话框Fig.6 Configuration dialog box of general acoustics characteristic parameter
防御方装订单次仿真开始前的三维坐标、对抗装备发射初始方位、初始航速,以及各次弹道变更的时间(相对于发射时刻)、航向变化量、航速变化量、航深变化量等相关参数,对抗装备仿真节点开始运行,每个仿真节拍需要进行主动声学线程、被动声学线程和运动参数的解算,系统管理节点可以数据化或图形化显示出每节拍解算的结果,实时地把程序的解算与对应结果的显示实时反映在界面上。对照我们先前设置的参数信息,以验证运动学仿真和声学仿真模块设计的正确性。图7为仿真对象运动轨迹图。

图7 仿真对象运动轨迹Fig.7 Trajectory diagram of simulation object movement
4 结语
水声对抗装备仿真研究是综合研究水声对抗装备性能,提高反鱼雷战技指标的有效手段。本文对水声对抗装备仿真研究中的模块通用化进行了研究,提出了参数功能配置和模块集成的新方法,突破了以往单个对抗装备型号建模仿真的局限性,可有效地实现模块及资源的共享,提高模块的复用性,为水声对抗仿真的系统化集成提供了新的思路。
[1]姚蓝,刘平香.反鱼雷水声对抗技术的现状与发展[J].声学技术,2001,(4):183 -187.YAO Lan,LIU Ping-xiang.Present and future of anti torpedo countermeasure technology[J]. Acoustic Technology,2001,(4):183 -187.
[2]陈军.水声对抗装备建模及效能评估研究[D].西安:西北工业大学,2008.CHEN Jun.Modeling and efficiency evaluation of underwater acoustic counterwork equipments[D].Xi'an:Northwestern Polytechnical University,2008.
[3]陈春玉,等.反鱼雷技术[M].北京:国防工业出版社,2006.CHEN Chun-yu,et al.Anti-torpedo technology[M].Beijing:National Defense Industry Press,2006.
[4]王百合.水声对抗系统的建模与仿真技术研究[D].西安:西北工业大学,2005.WANG Bei-he.Modeling and simulation of underwater acoustic countermeasure system[D].Xi'an:Northwestern Polytechnical University,2005.
[5]王琳.水声对抗器材建模及目标特征参数提取方法研究[D].西安:西北工业大学,2000.WANG Lin.Study on the modeling of underwater acoustic countermeasure equipments and the methods of target feature extraction[D].Xi'an:Northwestern Polytechnical University,2000.
[6]徐宁来.通用水声对抗装备仿真软件总体设计[D].西安:西北工业大学,2009.XU Ning-lai.General underwater acoustic countermeasure equipmentsimulation software design[D].Xi'an:Northwestern Polytechnical University,2009.
猜你喜欢
家庭影院技术(2020年6期)2020-07-27 01:37:54
河北省科学院学报(2020年1期)2020-05-25 06:57:18
家庭影院技术(2019年1期)2019-01-21 02:25:04
家庭影院技术(2018年11期)2019-01-21 02:20:50
制造技术与机床(2018年11期)2018-11-23 01:07:50
家庭影院技术(2018年10期)2018-11-02 05:35:26
电子制作(2017年22期)2017-02-02 07:10:34
电子制作(2017年19期)2017-02-02 07:08:28
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
海军航空大学学报(2015年1期)2015-11-11 17:18:37
