
船舶机舱淡水温度自动控制系统限位设计
2012-10-20 06:57:58赵辅国董庆丰
舰船科学技术 2012年2期
赵辅国,董庆丰
(中国卫星海上测控部,江苏 江阴 214400)
0 引言
2010年9月3日,在执行“北斗”导航卫星的测量任务中,“远望”六号航天测量船运行的2台发电柴油机忽然出现淡水温度偏高报警,淡水温度并有不断上升的趋势。经过轮机人员检查发现,冷却发电柴油机淡水的1号中央冷却器淡水温度自动控制系统的三通阀处于完全旁通位置,淡水不经过中央冷却器在系统循环,致使发电柴油机淡水温度不断升高。如果淡水温度继续升高超过设定值时,发电柴油机就会自动停机而导致全船停电,严重影响着船舶航行和试验任务的安全。本文基于此故障介绍系统原理,分析故障机理,意在设计淡水自动限位装置,以保证船舶动力系统的安全稳定。
1 船舶淡水温度自动控制系统
机舱大部分运行的设备都需要淡水冷却,因此把淡水温度保持在设定值,对机舱设备安全、可靠和经济的运行十分重要。大部分船舶对淡水温度的控制方法是,把冷却设备后的淡水分成2部分:一部分淡水通过中央冷却器,用海水冷却淡水,使淡水温度降低;另一部分淡水不通过中央冷却器,与经过海水冷却的淡水混合,继续冷却设备。如果淡水温度高于设定值,则增大经过中央冷却器的淡水量;如果淡水温度低于设定值,则减少经过中央冷却器的淡水量,使淡水温度升高到设定值。
淡水温度自动控制系统由中央冷却器、测温元件(感温包)、调节器、定位器和三通调节阀等基本元件构成(见图1)。测温元件安装在设备的淡水进机管路上,测温元件的输出信号与淡水进口温度成正比例变化。测温元件输出信号送至调节器,调节器把淡水温度设定值与测量值相比较得到偏差,然后按照程序输出1个控制信号送至执行机构,从而改变三通调节阀的开度,把淡水温度控制在设定值。
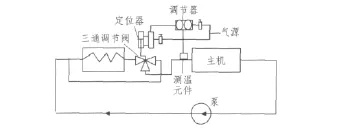
图1 气缸冷却水温度控制原理Fig.1 Cylinder cooling water temperature control principle
2 NAKAKITA型PID调节器工作原理
2.1 比例积分微分作用规律
比例积分微分作用规律就是把比例、积分、微分作用组合在一起。在这种作用规律中,仍以比例作用为主,吸收积分作用能消除静态偏差,微分作用能实现超前控制的优点,是目前最完美的作用规律。用这种作用规律制成的调节器,叫做比例积分微分调节器,或叫PID调节器。PID作用规律输出与输入之间的关系为:

式中:K为比例积分微分调节器的比例作用放大倍数,在实际系统中,仍然是用PB来衡量比例作用的强弱;Ti为积分时间;Td为微分时间。
图2显示出了比例积分微分作用规律的输出特性。在给比例积分微分调节器施加1个阶跃的偏差输入信号后,它首先有1个较大的比例加微分的阶跃输出,然后微分输出逐渐消失。当微分输出消失接近到比例输出时,积分输出才不断显露出来,使其输出不断增加。在图中,OA是比例输出,AB是微分的阶跃输出。在比例积分微分调节器中,如果把PB,Ti和Td这3个参数整定的合适,控制系统就能达到最佳的动态过程品质。
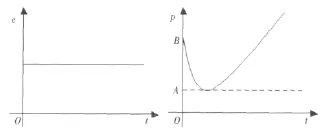
图2 PID调节器输出特性Fig.2 PID regulator exportation characteristic
2.2 PID调节器工作原理
在淡水温度自动控制系统中常用的调节器一般是NAKAKITA型气动调节器,该调节器是按照位移平衡原理工作的,能实现PID控制作用,其结构原理如图3所示。
当淡水出口温度的测量值与设定值相等时,调节器处于平衡状态,黑色测量指针与红色给定指针重合,这时,喷嘴与挡板之间的开度保持不变,调节器输出为某一稳定值。此时比例波纹管、积分波纹管、微分气室及积分气室的压力均相等,且等于调节器的输出压力。
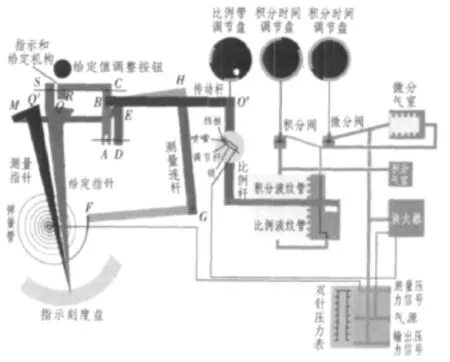
图3 NAKAKITA型PID调节器结构原理图Fig.3 NAKAKITA PID regulator structure principle
当系统受到扰动时,淡水出口温度的测量值就会偏离设定值而出现偏差,假设温度低于设定值,则温包输出一个与温度成比例减小的气压信号,经输入管路进入弹簧管,弹簧管因压力减小而收缩,使测量连杆带动HED杆和HEM以E为轴顺时针转动。它在使温度指示值减小的同时使AC杆绕C轴顺时针转动,BO'杆(传动杆)左移,比例杆以O为支点逆时针转动,使挡板靠近喷嘴,喷嘴背压升高,经功率放大器放大后使调节器的输出压力升高。这个升高的输出压力信号,一路去气动三通调节阀,关小调节阀使淡水温度升高;另一路经反馈环节,实现PID控制作用。调节器的反馈环节是由比例波纹管、微分气室、微分阀、积分气室、积分阀和积分波纹管等组成。调节器输出的压力信号首先进入微分波纹管。因为波纹管内压力大于微分气室的压力,微分波纹管伸长,挤压微分气室,使微分气室和比例波纹管内的压力瞬间增大,这时比例杆以传动杆B点为支点略有上移,使挡板略微离开喷嘴,这一负反馈作用很微弱,所以调节器的输出压力便大大升高。随着时间的增加,调节器的输出压力不断经微分阀向微分气室和比例波纹管充气,使比例波纹管内压力不断增大,负反馈作用不断加强,挡板又逐渐离开喷嘴。当测量信号使挡板靠近喷嘴的位移量与负反馈信号使挡板离开喷嘴的位移量相等时,调节器达到暂时稳定。积分作用是通过正反馈实现的,调节器输出的压力信号经微分阀向微分气室充气的同时,经积分阀向积分气室充气,使积分波纹管内压力不断增大,挡板又逐渐靠近喷嘴,调节器输出压力又逐渐增大。当淡水温度与设定值相等时,调节器又重新处于平衡状态,测量指针与给定指针又相重合。如果淡水出口温度大于设定值,调节器的动作方向与上述相反。
3 NS739气缸式三通阀定位器工作原理
NS739型定位器通过气缸来实现定位控制,定位准确稳定,输入由PID调节器输出的0.02~0.1 MPa的气压信号,气压信号控制阀芯动作使0.2 MPa的气源与气缸连通,使其动作来控制三通阀的开度,其工作原理如图4所示。
调节器输出的控制信号经过管路进入输入腔A,在输入腔A中通过压力的变化使挡板B移动,以此来改变喷嘴与挡板的距离,使喷嘴的背压改变。若输入1个增加的控制信号,则喷嘴与挡板的距离减小,使喷嘴的背压升高,导致隔板C侧的压力大于隔板D,阀芯向左移动,压缩空气通过左侧的气道进入气缸。气缸中的空气经过右侧气道排出使活塞向右移动来改变三通阀的开度,同时也导致反馈弹簧移动,当反馈弹簧的作用力与输入腔的气压平衡时活塞停止移动。若控制信号降低,则定位器动作与上述相反。
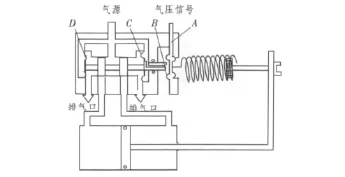
图4 NS739型气缸定位器原理Fig.4 NS739 cylinder position machine principle
4 影响淡水温度自动控制系统的因素
4.1 PID调节器故障
调节器长时间使用后由于气体中的灰尘,外界的震动等原因会导致以下故障:
1)当测量的输入值改变时,输出压力不增加。导致此故障的原因有:放大器内的气孔堵塞;气体管路出口侧产生裂缝而泄漏;管路焊接处泄漏;调节器内部环节连接不良甚至松落;调节器内部管路泄漏;测量部分的零件出现损坏等。
2)当测量的输入值改变时,输出压力不减少。导致此故障的原因有:调节器的喷嘴堵塞;放大器里的气道堵塞;调节器内部的机械环节松动;调节器内部管路泄漏。
4.2 三通阀定位器故障
长时间使用后由于气体中的水分和杂质,以及外界的震动等原因会导致以下故障:
1)当气压信号增加或减少时,气缸不动作,此故障是由气缸的进排气孔堵塞导致的;
2)气缸间歇地对气压信号做出反应,这是由灰尘等杂质阻塞了阀芯的移动或气缸的进排气孔堵塞导致的;
3)当气压信号超过20 kPa时,气缸不动作或气压信号低于20 kPa时气缸动作,此故障的原因是调零螺母调节不正确;
4)气缸的动作与气压信号(20~100 kPa)的改变不相应,故障原因为弹簧的跨度调节不正确;
5)气压信号增加时,气缸不动作,使三通阀始终保持在进冷却器一端全关,而旁通冷却器一端全开的位置,导致淡水温度急剧升高。
5 淡水温度自动控制系统限位设计方案
上面详细列举了影响淡水温度自动控制系统稳定运行的故障隐患,但是在船舶实际使用过程中,只有三通阀定位器故障中第5个问题时有发生,其他问题从没有出现过。而这个故障的机理是由于定位器中的气道或喷嘴堵塞使阀芯始终保持在一个位置,导致气缸一侧始终与气源连通,使定位器的控制作用失灵。三通阀始终保持在进冷却器一端全关,而旁通冷却器一端全开的位置,导致淡水温度急剧升高。因为当今大部分船舶采用主柴油机以及发电柴油机由淡水冷却的做法,而淡水温度正是由淡水温度自动控制系统控制,一旦该系统出现问题,发现不及时就会使全船停电,甚至导致主机停车的严重后果,严重影响着船舶航行的安全。所以为了避免出现此类严重后果,针对此故障设计了系统限位装置,在定位器失灵时及时切断气源防止定位器气缸进一步动作,以达到限位的效果,防止淡水温度进一步升高。
5.1 方案与原理
淡水温度自动控制系统中三通阀在进冷却器以及旁通冷却器2段管路上都安装有开度指示,每段管路开度由小到大分为5级,旁通冷却器管路开度用“Bypass”表示,进冷却器管路开度用“Cooler”表示。如图5所示,在气源与定位器之间安装1个机械两位三通阀,在旁通冷却器管路的开度指示器“Bypass 2”位置与机械两位三通阀之间安装1个机械传动装置,在旁通冷却器管路开度超过“Bypass 2”的位置时,开度刻度指示杆推动机械传动装置动作,从而激发机械两位三通阀阀芯上行,切断定位器气源,阻止旁通冷却器管路开度继续增大,避免淡水温度继续升高,达到限位的功能。
5.2 方案可行性分析
1)此方案实现了淡水温度自动控制系统发生故障失去控制时的自动限位功能,避免了因系统故障而使淡水温度急剧升高的严重后果。
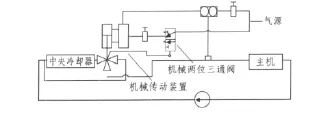
图5 设计方案Fig.5 Design project
2)此方案中使用的机械两位三通阀及机械传动装置结构简单,造价低,维护容易,安全可靠。
3)此方案在改造过程中需要改动的设备少,工程量较低,对系统无其他不良影响,可行性高。
5.3 方案实践验证
通过在“远望”六号船实践验证,机舱淡水冷却设备最大功率(主机满负荷运行)时,把淡水温度设定值设为船舶冷却淡水常用温度35℃,三通阀旁通冷却器管路不同开度时,记录对应淡水的实际温度(见表1)。

表1 三通阀开度对淡水实际温度的影响Tab.1 Triple valve opening impact on the true temperature of freshwater
由表1可以看出,冷却设备最大功率的情况下,旁通冷却器管路开度达到Bypass 1时,淡水温度可以维持在设定值35℃;开度达到Bypass 1与开度达到Bypass 2之间时,淡水实际温度高于设定值35℃,但小于40℃;开度达到Bypass 2时,淡水实际温度可以维持在40℃;当开度大于Bypass 2时,淡水实际温度就开始高于40℃;一般情况下,船舶低温冷却淡水的温度范围基本都为35~40℃。机舱淡水冷却设备最大功率时,冷却淡水与设备之间的交换热量最大,旁通冷却器管路开度的大小对淡水实际温度的影响也最大。所以选择在Bypass 2位置激发机械传动装置,在任何设备功率的情况下,即使系统出现故障,也可以有效避免淡水温度超过40℃,从而可以保证淡水冷却设备的稳定运行。
6 结语
机舱淡水温度自动控制系统的工作状况切实影响着船舶动力系统以及电力系统的安全稳定,因此确保该系统安全可靠的运行尤为重要。本文通过加装机械传动装置以及两位三通阀的方法,提出了一个相对简单的解决方案。该方案提高了机舱淡水温度自动控制系统的安全性和可靠性,有效保证了船舶动力设备的稳定运行,为船舶更加安全的航行提供了切实可行的安全保障。
[1]李世臣,徐善林.轮机自动化[M].大连:大连海事大学出版社,2008.LI Shi-chen,XU Shan-lin.Ship engine automate[M].Dalian:Dalian Maritime University Press,2008.
[2]费千.船舶辅机[M].大连:大连海事大学出版社,2005.FEI Qian.Ship auxiliary machine[M].Dalian:Dalian Maritime University Press,2005.
[3]于洪亮.船舶动力装置[M].大连:大连海事大学出版社,2006.YU Hong-liang.Ship power equiment[M].Dalian:Dalian Maritime University Press,2006.
[4]孙明.轮机管理[M].大连:大连海事大学出版社,2005.SUN Ming.Ship engine manage[M].Dalian:Dalian Maritime University Press,2005.
[5]初忠.轮机自动化[M].大连:大连海事大学出版社,2006.CHU Zhong.Ship engine automate[M].Dalian:Dalian Maritime University Press,2006.
[6]李杰仁.轮机自动化基础[M].大连:大连海事大学出版社,2005.LI Jie-ren.Ship engine automate foundation[M].Dalian:Dalian Maritime University Press,2005.
猜你喜欢
湖北农机化(2021年7期)2021-12-07 17:18:46
减速顶与调速技术(2021年1期)2021-08-14 01:59:38
科技创新导报(2021年33期)2021-04-17 08:38:01
电气化铁道(2016年4期)2016-04-16 05:59:46
自动化仪表(2015年5期)2015-06-15 19:01:34
电源技术(2015年9期)2015-06-05 09:36:06
汽车维修与保养(2015年6期)2015-04-17 03:31:40
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:42
质量技术监督研究(2015年1期)2015-04-09 06:42:12
