鱼雷浅水主动声引信的一种布阵方法
2012-10-20 06:57崔户山王明洲白志科张文波
舰船科学技术 2012年2期
崔户山,王明洲,白志科,张文波
(1.中国船舶重工集团公司第七〇五研究所,陕西 西安 710075;2.水下信息与控制重点实验室,陕西 西安 710075)
0 引言
鱼雷作为重要的水下攻击武器,既能攻击水下目标,又能打击水面舰艇。而水声技术的研究,主要是对目标进行探测、估计、跟踪和定位。半个多世纪以来,随着人们对水下声学环境认知的不断深入,微电子和信号处理等技术的飞速发展,以及应用需求等多方面的推动,水声技术得到迅猛发展。近年来,对水下高速目标的探测、认知和定位日益受到重视,成为水声技术的一个重要研究领域。
在浅水状态下,鱼雷主动声引信应用较少,主要有2方面原因:一是主动声引信在水下环境中工作时,存在的干扰主要有海洋环境噪声、混响和运动目标的航行辐射噪声。除海洋环境噪声外,其他2种都是强干扰背景。尤其在浅水状态下混响强,信混比较低,一般条件下检测概率低。二是主动声引信发送窄脉冲,频率分辨率低,信号检测困难。在国外声引信鱼雷多用于深水反潜,由于在深水状态下界面混响影响小,信混比较高,检测成功率高,相对可靠。在浅水采用声引信具有一定的技术难度。本文通过提高引信发射信号频率,利用接收动目标回波信号的多普勒特性,提出一种适合浅水声引信的布阵形式,并给出了初步的设计参数和计算结果。
1 指向性函数
指向性函数[1]是描述发射阵辐射声场(自由远场)或接收阵灵敏度的空间分布函数,指向性函数也称作指向性图、方向特性函数等。
采用左手坐标系来绘制和测量阵的指向性图。

图1 左手坐标系Fig.1 Reference frame of left hand
1.1 N个点源任意分布的离散阵的指向性函数
如图2所示,各阵元的位置由矢径ri=(xi,yi,zi)表示。在(α,θ)方向,入射声线的单位矢量为e=exi+eyj+ezk,其中 ex=sinθcosα,ey=sinθsinα,ez=cosθ。如若采用相控技术使主波束在 (α0,θ0)方向上,设该方向上的单位矢量为m=mxi+myj+mzk,其中 mx=sinθ0cosα0,my=sinθ0sinα0,mz=cosθ0。

图2 任意分布离散阵的坐标系Fig.2 Reference frame of discrete arrays
取坐标原点o为参考点,则沿任意方向(α,θ)入射的声线使第i号阵元相对参考点o的声程差ξi=ri·e=xiex+yiey+ziez。来自主极大方向的声线使第i号阵元相对参考点o的声程差ξi0=ximx+yimy+zimz。因此任意方向(α,θ)入射的声波使第i号阵元相对主极大方向(α0,θ0)入射的声波的相位差为
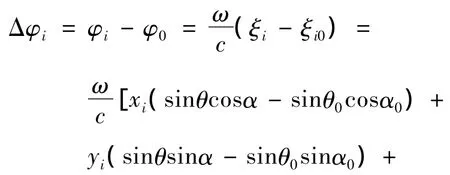

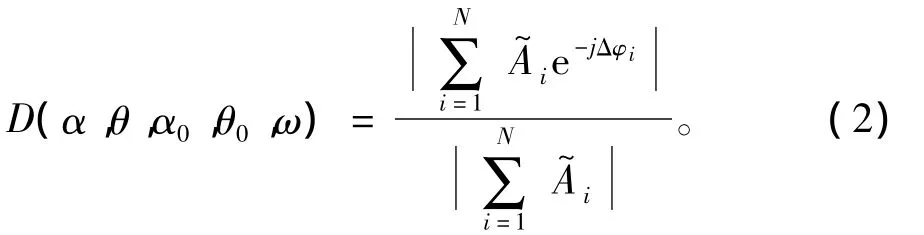
其中,c为声速;ω为工作角频率。N个阵元任意分布的离散阵在三维空间的指向性函数为

1.2 连续体的指向性函数
有连续曲面阵的指向性函数为
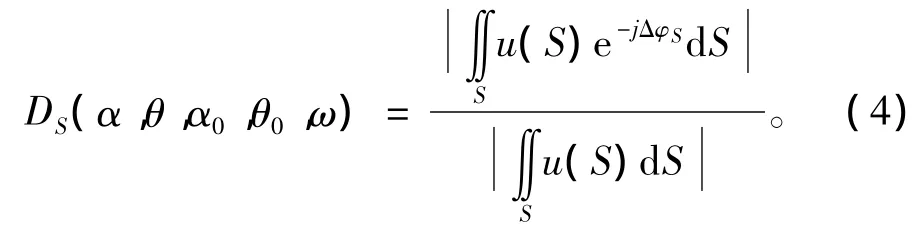
式中:u(S)为连续面上的响应分布函数,也称做孔径分布函数;ΔφS为连续体各积分元在(α,θ)方向的声波相对于主极大(α0,θ0)方向的声波的相位差。
将矩形阵置于oyz平面上,设y和z轴所对应的矩阵的两边长为b和a。坐标原点在矩形活塞阵的对称中心。面元dS相对于对称中心o的相位差为

将上式代入式(4),被积函数u(S)为常数,于是其指向性函数为

取定向面为面 oxz,即 α =0°,0°≤θ≤180°。则有
2 布阵方法
2.1 前向-周向布阵方法
如图3所示,矩形阵元A布在雷头前端面,将矩形阵元B放置在侧面上。如图4所示,在雷头对称的排列出3~4对阵元。令矩形阵元A的一边为a,矩形阵元B的两边分别为c和d。

对矩形阵元A,为在频率f0时波束宽度达到要求(θ-3dB≥90°),计算得出 a边长最大为6.2 mm。
对矩形阵元B波束宽度要求为θ-3dB≥60°,结果见表1。

表1 矩形阵元B尺寸参数Tab.1 Size parameter of array B
表1中c和d长度均为满足条件时的最大长度。
通过分析可看到,前向-周向布阵方法中的B阵元角度利用不够充分,会造成引信覆盖的盲区。
2.2 前向-侧周向布阵方法
如图5所示,前向-侧周向布阵方法与前向-周向布阵方法的区别是将矩形阵元B放置在雷头的斜面上,波束宽度要求有所不同,计算方法与前向-周向布阵方法一致,由其波束宽度确定各个阵列的尺寸大小。

图5 前向-侧周向布阵示意图Fig.5 Arrays in front-side around direction
为实现引信角度的全覆盖,在临界条件下,各个角度之间有如下关系:

为确定最合适角度,综合考虑,下列角度选择较为合适,即当α =65°,β=50°时,矩阵A的频率为f0,a边覆盖角度θ-3dB≥50°,可得a边长最大为10.5 mm,θ-3dB=50°。此时a边对应的波束图如图6所示。

图6 a边对应波束图Fig.6 Beam pattern of side a
在径向布放4对换能器,频率及尺寸的最大值在表2中给出。

表2 矩形阵元B尺寸参数Tab.2 Size parameter of array B

采用前向-侧周向布阵方法,各个阵元尺寸较为适中,且阵元尺寸符合要求。
3 换能器厚度计算
根据厚度计算公式,即

当工作频率等于长棒固有的基波特征频率时,机械振动系统达到谐振,即当工作在谐振时,棒长应等于工作频率时声波波长的二分之一。选用PZT-4型压电陶瓷,故有如下计算:

则根据式(8),可计算出各个频率矩形阵元所对应的厚度。
4 目标的多普勒频移
如图7所示,鱼雷在行进过程中,目标在波束覆盖的范围内出现。2种极限情况是:目标速度方向和鱼雷速度方向相反、目标速度方向和鱼雷速度方向垂直。在这2种极限情况下,可求得目标对于鱼雷位置角度η与θ、目标速度方向角度φ与δ角度变化时的多普勒频移,如图7所示。其中鱼雷速度v为40 kn,目标速度v1为20 kn。

图7 鱼雷检测目标角度示意图Fig.7 Angles when detecting target
图7中,φ和δ分别为目标速度方向与水平方向、垂直方向的夹角;η为目标与矩形阵元A几何中心的连线与矩形阵元A法线的夹角,θ为目标与矩形阵元B几何中心的连线与垂直方向的夹角。则对矩形阵元A,有

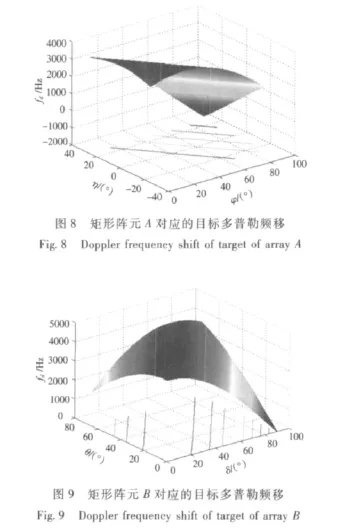
其中,η的变化范围为[-25°,25°];φ的变化范围为[0°,90°]。故可得矩形阵元A对于目标的多普勒频移三维图如图8所示。
对矩形阵元B,有

其中,θ的变化范围为[0°,65°];δ的变化范围为[0°,90°]。可得矩形阵元B(以f1为例)对于目标的多普勒频移三维图如图9所示。
综上所述可得如下结论:
1)若采用时宽为1 ms的信号,频谱宽度约为1 kHz,则对矩形阵元A检测模糊区为
对矩形阵元B(以f1为例)检测模糊区为

2)若采用时宽为2 ms的信号,频谱宽度约为500 Hz,则对矩形阵元A检测模糊区为

对矩形阵元B(以f1为例)检测模糊区为
5 结语
本文设计了浅水状态下的主动声引信模型,给出了引信各个部分的尺寸计算方法,获得了各个矩阵对应的多普勒频移图,针对频移图来确定目标。本文确定了一种有效的布阵方案,是在浅水状态下对抗混响的一种有效方式,是对浅水主动声引信研究的一次积极的探索。
[1]栾桂冬,张金铎,王仁乾.压电换能器和换能器阵[M].北京:北京大学出版社,2005.
[2]周福洪.水声换能器及基阵[M].北京:国防工业出版社,1983.
[3]杨崇林,陆善明,姚蓝.水下动目标近程主动声引信技术研究[J].中国造船,2000,41(4):79 -84.YANG Chong-lin,LU Shan-ming,YAO Lan.Study and implementation of active acoustic fuze for underwater moving target[J].Shipbuilding of China,2000,41(4):79-84.
[4]R.J.尤立克.水声原理[M].洪申,译.哈尔滨:哈尔滨船舶工程学院出版社,1990.
[5]ETTER P C.水声建模与仿真[M].蔡志明,等译.北京:电子工业出版社.
[6]HINES P C,ELLIS D D.High-frequency reverberation in shallow water[J].IEEE Journal of Oceanic Engineering,1997,22(2):292 -298.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
电声技术(2022年4期)2022-06-15
动漫界·幼教365(中班)(2021年3期)2021-04-06
作文成功之路·小学版(2020年9期)2020-10-28
人大建设(2018年11期)2019-01-31
水下无人系统学报(2018年5期)2018-11-09
农产品市场周刊(2018年15期)2018-05-16
小雪花·成长指南(2017年4期)2017-06-12
小雪花·成长指南(2017年5期)2017-06-07
火控雷达技术(2016年1期)2016-02-06