基于LabVIEW的超级稻秧盘播种质量检测技术研究①
2012-09-27 14:26周海波李洪波王桂莲刘冠乔
佳木斯大学学报(自然科学版) 2012年5期
周海波, 李洪波, 王桂莲, 刘冠乔
(佳木斯大学机械工程学院,黑龙江 佳木斯 154007)
0 引言
超级稻与常规水稻(杂交稻和常规稻)在种植上的不同之处在于秧盘育秧播种技术的要求由原来的常规水稻大于3粒/穴(取秧面积)的精少量播种,提升为2±1粒/穴(取秧面积)的精量播种[1-2].目前精密播种的理想目标是 2 ~ 3 粒/穴(取秧面积),而现有的机械化播种技术达不到此要求,且单粒率和空穴不可避免[3].因此,针对目前水稻秧盘育秧播种均存在空穴的情况和超级稻种植的要求,使得超级稻秧盘播种质量检测的研究变得非常重要.该研究是今后补种工作不可缺少的步骤,也是提高水稻单产、实现农业增效和农民增收的主要途径.
1 钵体秧盘图像处理及算法研究
为了消除图像中无关的信息(如图像的背景),将所需要的信息予以还原,需要对图像进行预处理,其主要目的是最大限度地简化数据,增强相关信息的可检测性,以便于提高后续图像处理的可靠性,为此本文针对钵体秧盘图像特点采用图像增强的中值滤波方法对钵体秧盘图像进行预处理,中值滤波法可以有效的滤除噪声,可以得到较清晰的种子边缘信息,有利于图像分割.图像分割就是把数字图像细分为若干个图像子区域并将感兴趣目标从子区域中提取出来的过程,本文主要采用基于阈值分割和边缘检测相结合的分割方法,提取种子图像,并进行播种质量检测.
边缘检测是图像分割的一种重要途径,其方法计算简单、适用范围广,是最常用的图像分割方法.本文运用Roberts算子对钵体秧盘图像进行了处理,采用Robers算子运算效率较高,是边缘检测中最常用的一阶微分算子[4-5],它为梯度幅值计算提供了一种简单的计算方法,其公式为:

其中 f(x,y),f(x+1,y+1),f(x+1,y),f(x,y+1)分别为四邻域的坐标,且是具有整数像素坐标的输入图像,在水平和垂直方向的定位精度较高,它的平方根运算与人类视觉系统的发生过程相类似.
Roberts算子的两个模板:
这两个2×2算子模板(卷积核)形成了Ro-berts算子,所处理的图像中的每一个像素点都与这两个模板作卷积,对其进行梯度运算.根据Roberts边缘检测算子的原理,我们利用LabVIEW虚拟仪器平台实现了Roberts算子对钵体秧盘图像进行边缘识别的过程(图1).

图1 Roberts算子程序框图
程序说明:通过LabVIEW的IMAQ模块建立图像处理任务,读取摄像头拍摄的图像文件,通过Color Plane控件以及IMAQ Extract可以提取钵体秧盘图片红色R分量,IMAQ Threshold将所拍摄的图像转化为二值图像,经中值滤波去除噪声后,利用Roberts算子提取稻种边缘并输出处理后的图像.

图2 Roberts算子分割图像

图3 经阈值分割后使用Roberts边缘算子得到的图像
通过图2可知,使用Roberts算子进行图像分割,其计算方便快捷,利于在线检测.因其采用对角线方向相邻两个像素之差近似梯度幅值检测图像边缘,对水平和垂直两个方向定位精度高,但对噪声敏感,检测出的图像边缘较粗糙,因此,考虑在使用Roberts算子分割图像之前对图像进行中值滤波和自动阈值分割处理.然后利用Roberts算子对获得的种子的二值图像进行二次分割,提取种子的边缘信息,图3为Roberts算子分割后的图像,噪声影响减小,种子的边缘较为连贯.
2 钵体秧盘播种质量检测系统的设计
秧盘播种质量检测系统所需要的硬件设备主要有CCD照相机、采集卡、光电位置开关、箱体和计算机.系统工作前,根据所采用的钵体秧盘规格,调整摄像机的安装高度,本研究所采用的钵体秧盘规格为25×15穴,预拍摄区域为5行×15列的范围,CCD摄像机的安装高度约为700mm.并且2YCL-450型水稻秧盘育秧精密播种机稳定工作时,秧盘前进速度约为76mm/s的条件下进行试验.LabVIEW拥有丰富的图形控件[6],其中视觉模块还提供了丰富的图像处理函数,完全能够解决基于视觉识别的种种问题.
下图为应用LabVIEW设计播种质量检测系统的程序框图(图4).
程序说明:程序框图a主要实现的功能是读取CCD摄像头以及图像采集卡采集的钵体秧盘图像,并建立图像采集任务,设定待识别区域的参数,并将其转化为掩模,将原图像转化为R分量图像,利用阈值分割和Roberts边缘算子对图像进行处理;程序框图b主要实现的是将程序框图a处理的二值图像进行掩模覆盖,计算掩膜内灰度值,并将数据进行存储.
3 检测结果的分析
利用CCD摄像机和图像采集卡对钵体秧盘图像进行了连续拍摄.在实际操作中,处理与分析一幅图片的总耗时约为0.26s.随机选取了一组钵体秧盘图像,经图像处理后得到二值掩模图像(图5),根据图像处理结果,将每个掩模内的灰度均值统计结果储存在数组中.进行处理,所得到的试验结果如图5所示:

通过对所处理的钵体秧盘图像中各个穴孔内种子形态及其灰度均值的统计,然后将各个掩模内对象的灰度均值范围由小到大排列,我们可以根据灰度均值的范围大致判断出穴孔内种子的数量(见表1),从而检测出钵体秧盘的播种质量.

图4 播种质量检测系统主要程序框图

表1 不同灰度均值范围所对应的稻种形态
表1中我们可以看出,当灰度均值小于0.015时为空穴;当灰度均值在0.015~0.05范围时,孔穴内有一粒种子;当灰度均值大于0.05时,孔穴内有两粒以上的种子.
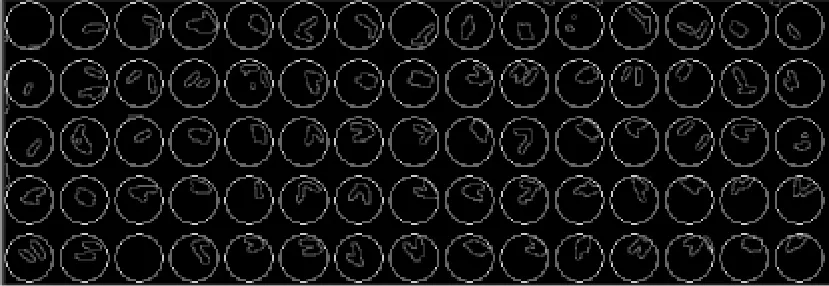
图5 种子边缘信息的二值掩模图像
4 结论
文章应用计算机视觉技术系统设计了钵体秧盘播种质量检测系统.该系统基于LabVIEW编写了虚拟仪器程序,通过视觉模块所提供的图像处理函数,在红光R分量图下,运用中值滤波获得平滑图像,通过自动阈值法和Roberts边缘算子得到了较为连贯的钵体秧盘边缘二值图像.并进行了在线钵体秧盘播种值量检测的应用试验与对比分析,试验结果表明,改进后的检测精度达到80%以上.
[1]何文洪,陈惠哲,朱德峰.不同播种量对水稻机插秧苗素质及产量的影响[J].中国稻米.2008(3):60-62.
[2]孙涛,商文楠,金学泳.不同播种粒数对水稻机插秧苗素质及产量的影响[J].中国农学通报.2005,21(7):134 -137.
[3]张传斌,吴亚萍.烟草装盘播种机用精量穴播排种器的试验研究[J].农机化研究.2012(10):161-168.
[4]吴炯,张秀彬,张峰等.数字图像边缘算法的实验研究[J].微计算机信息.2004,20(5):106-107.
[5]赵月云,王波.基于Roberts边缘检测的面向对象建筑物信息提取[J].城市勘测.2012(2):121-125.
[6]刘洋,方敏.基于LabVIEW的视觉伺服机械臂控制系统[J].微型机与应用.2012,31(10):25 -27.
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19
江苏农业科学(2021年10期)2021-07-01
高技术通讯(2021年2期)2021-04-13
中学生数理化·高一版(2021年1期)2021-03-19
中学生数理化·高一版(2019年1期)2019-06-26
新农民(2019年36期)2019-02-20
测控技术(2018年10期)2018-11-25
农业机械学报(2018年6期)2018-07-05
农业科技与装备(2018年6期)2018-03-15
中学生数理化·高一版(2018年1期)2018-02-10