
直接磁悬浮永磁直线电动机运行机理研究*
2012-09-26 09:31蓝益鹏张凤阁
制造技术与机床 2012年3期
蓝益鹏 张 武 张凤阁
(沈阳工业大学电气工程学院,辽宁沈阳110870)
摩擦阻力是制约直线电动机数控机床性能和加工精度的重要因素之一,将磁悬浮技术应用于直线驱动系统研制新一代高精高速数控机床有着重要意义[1-4]。目前主要采用电磁铁实现直线电动机磁悬浮来消除摩擦,其缺点是需要多点支撑悬浮,装置复杂。针对以上问题,提出一种新型直接磁悬浮永磁直线电动机,该电动机的动子上有两套绕组,一套绕组用于产生电磁推力,另一套绕组用于产生磁悬浮力。它不同于电磁铁磁悬浮系统,是靠永磁直线电动机自身产生的磁悬浮力来运行,既能够实现零传动快速进给,又能够从根本上解决困扰高精高速数控机床消除摩擦问题的技术难点。通常计算电动机电磁力的方法有麦克斯韦张量法、虚位移法和等效节点力法[5-9]。麦克斯韦张量法公式推导和使用比较简单,但是受单元类型和积分路径的影响较大,当采用不同剖分单元类型和不同积分路径时,计算误差较大。等效节点力在描述电磁力分布时不够直观,而且各节点处的等效节点力受其周围剖分单元大小的影响,不便进行直接的比较。
文献[5]证明虚位移法虽然推导相对复杂,但是受积分路径、剖分单元的影响不大。文献[7]用虚位移法对涡流场进行了分析;文献[8]采用虚位移法计算了对相接触的不同磁性材料在瞬态场中所受电磁力,但是得到的解析表达式是由雅克比矩阵表示的。本文采用虚位移法对直接磁悬浮永磁直线电动机推力和悬浮力解析式进行推导,并将解析计算结果与ANSOFT的计算结果进行比较,对本文提出的理论进行验证。
1 直接磁悬浮永磁直线电动机的运行机理
图1为直接磁悬浮永磁同步电动机示意图。电动机次级定子上附有N、S极相互交替的永磁体,初级动子由铁心设计成开口槽结构,槽内嵌入两套绕组。
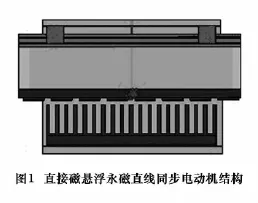
新型直接磁悬浮永磁直线电动机在动子槽内有两套绕组,分别为推力绕组以及悬浮绕组。与目前主要采用的电磁铁或者电磁和永磁混合励磁的直线电动机磁悬浮技术相比,新型磁悬浮永磁直线电动机不需要电磁铁悬浮系统,即不增加实现悬浮的功耗,而且由于省去了电磁铁悬浮系统从而节约了成本,同时降低了装置的复杂性。在电动机中通入三相电流后,会在气隙中产生在直线方向呈正弦分布的行波磁场。永磁体励磁磁场与推力绕组产生的行波磁场相互作用产生电磁推力。通过改变悬浮绕组的电流对励磁磁场进行弱磁或者增磁调节,使动子实现稳定悬浮。在这里利用矢量控制策略令推力绕组id=0产生最大推力;对于悬浮绕组令iq=0,使悬浮绕组产生可控悬浮力。
2 电磁力的数学模型
当磁场能量用磁链或磁感应强度表示时,处于磁场中的物体包括载流导体和磁质受到的作用力可表示为

式中:Wm为所研究系统的磁场能量;g表示广义坐标。所研究系统的总磁能可表示为

式中:V为场域的体积;H为磁场强度;B为磁感应强度;A为矢量磁位;S为外边界表面。发生虚位移时,S面的形状及其上的边界条件并不改变,因此式(1)对能量求偏导数时,式(2)中第二项面积分的导数为0。

于是有

当媒质为各向同性时,式(4)可写为
式中:Nn为运动边界上的节点数;Ne为邻接单元数;为单元i中的磁场能量;ΔVi为单元体积。在直角坐标系下,对于线性问题采用三角形单元时,有

式中:▽为微分算子;u为单元待求函数展开式的平面线性插值函数,故有

式中,a1、a2、a3为待定系数。将单元3个节点的坐标和待求函数值代入,可得
解此方程组得
式中
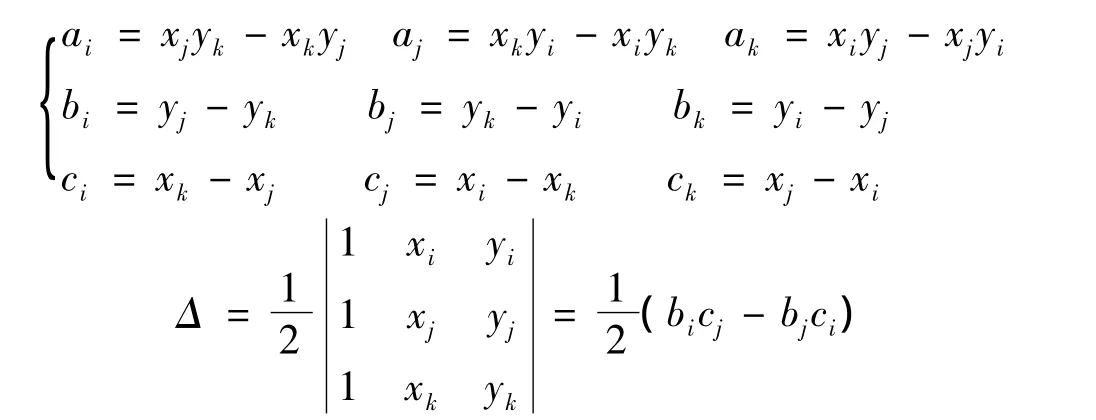
于是,得到单元的磁位线性插值函数为
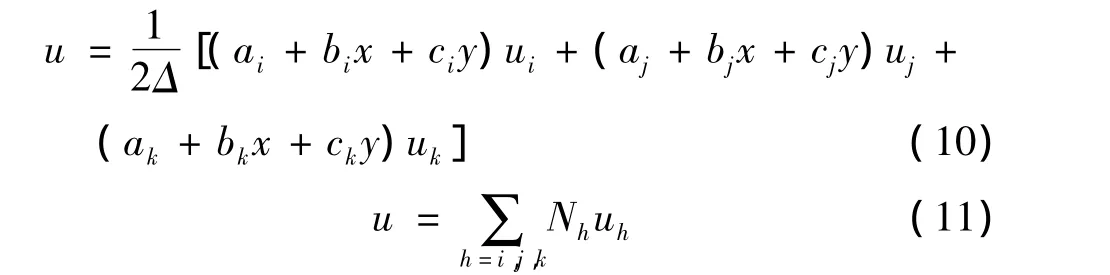
本文计算二维情况下的电磁力,于是有

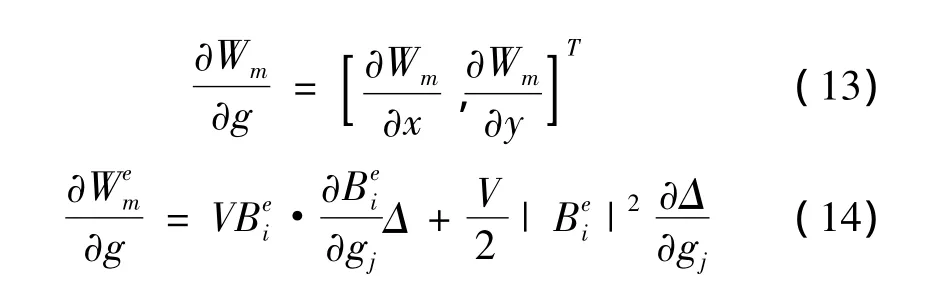
其中
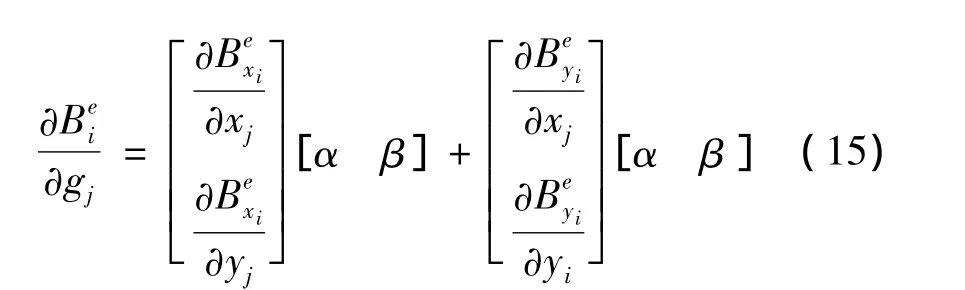
式中,α、β为节点的坐标微分。关于三角形单元的节点坐标微分,如有对于x方向的虚位移,则α=1,β=0;如有对于y方向的虚位移,则α=0,β=1。于是有
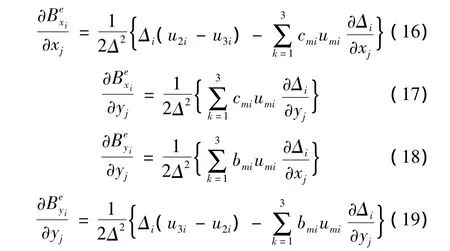
式中:bmi、cmi为三角形单元上插值函数的系数;下标2、3代表邻接单元中节点的编号,本文推导三角形单元只有一个点在交界面上的情况。其中:
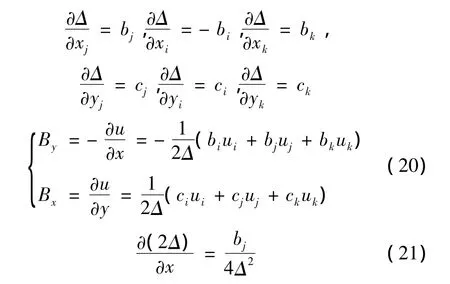
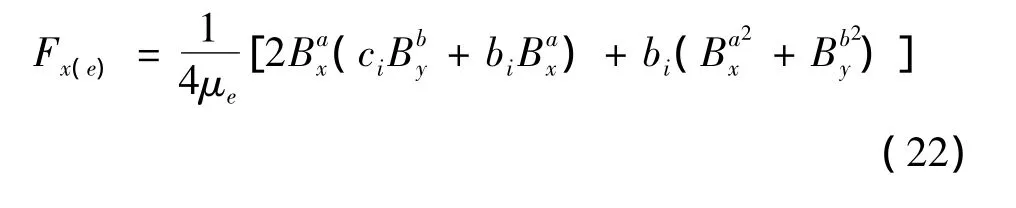
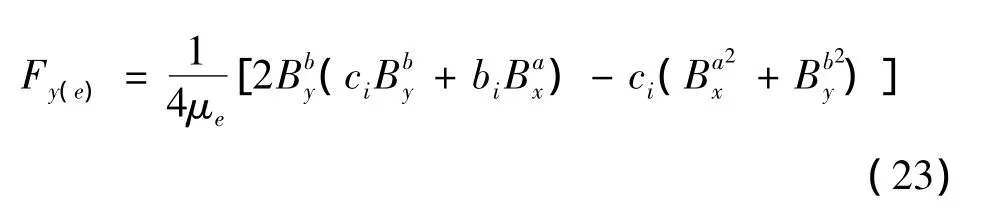
式中:μe为空气磁导率。于是电动机的切向电磁推力Fx和法向磁悬浮力Fy可表示为
3 仿真结果及分析
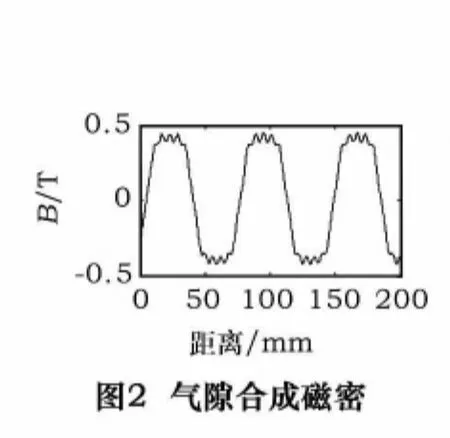
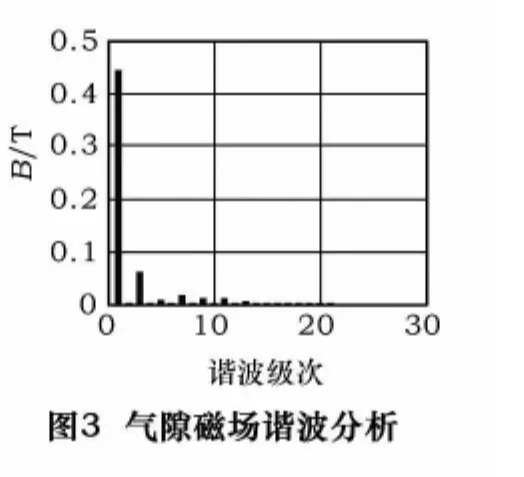
本文设计了一台6极36槽的直接磁悬浮永磁直线电动机。极距τ=36 mm,动子长度218 mm,齿间距6 mm,气隙高度5 mm,永磁体采用NeFeB30。图2为某时刻气隙中的合成磁通密度分布。图3是该电动机一对极下气隙磁密所作的谐波分析,可以看出谐波分量主要是三次谐波。
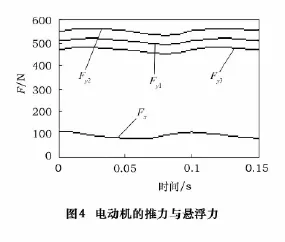
令推力绕组 id=0,iq=2.5;悬浮绕组 iq=0,id分别为0、2、-2产生的悬浮力分别为 Fy1、Fy2、Fy3。图 4为电动机产生的推力和悬浮力的变化情况,可以看出直接磁悬浮永磁直线电动机可以产生可控的悬浮力,通过控制悬浮绕组直轴电流可实现稳定悬浮。
根据虚位移法推导的电磁力解析表达式计算了直接磁悬浮永磁直线电动机的推力和悬浮力,同时利用有限元软件ANSOFT对电动机进行了建模及分析。为了验证采用虚位移法建立的电磁力模型的有效性和直接磁悬浮永磁直线电动机设计的正确性,将虚位移法解析计算结果与ANSOFT软件的计算结果进行了比较。图5、图6为悬浮绕组电流不变,只改变推力绕组电流时电动机的推力和悬浮力的变化情况;图7、图8为推力绕组电流不变,改变悬浮绕组励磁电流时电动机的推力和悬浮力的变化情况。
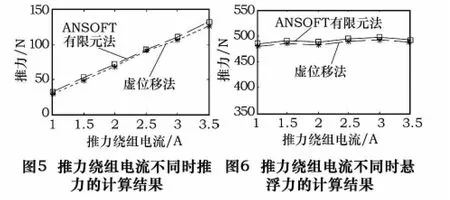
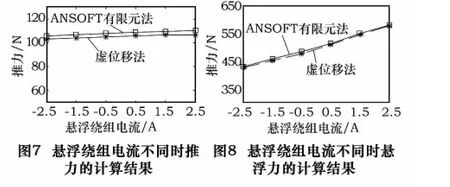
由仿真结果可知,解析式计算的结果与ANSOFT计算出电磁力结果的误差不超过4%,而且力的变化趋势一致,证明了采用虚位移法建立电磁力计算方法的有效性。此外,通过仿真结果可以看出对于推力绕组令其直轴电流id=0,控制其交轴电流iq,而悬浮绕组电流不变时,电动机产生的推力随推力绕组电流变化,而变化悬浮力有微小变化;对于悬浮绕组令其交轴电流iq=0,控制其直轴电流id,而推力绕组电流不变时,电动机产生的悬浮力随悬浮绕组电流变化而变化,推力有微小变化。证明直接磁悬浮永磁直线电动机可以产生解耦的推力和悬浮力,从而实现数控机床的无摩擦进给。
4 结语
(1)提出一种具有两套绕组的直接磁悬浮永磁直线同步电动机的结构,其中一套绕组用于产生电磁推力,另一套绕组用于产生磁悬浮力。该电动机可以产生可控的悬浮力,通过控制悬浮绕组电流来控制电动机的悬浮力实现稳定悬浮。
(2)提出对于推力绕组采用id=0的控制方式;对于悬浮绕组采用iq=0的控制方式。采用这种控制方式,直接磁悬浮永磁直线电动机可以产生解耦的推力和悬浮力,可以将电磁推力和悬浮力分为两个独立的控制系统单独进行控制,从而可以实现数控机床的无摩擦进给。
(3)采用虚位移法推导了直接磁悬浮永磁直线同步电动机的电磁推力及磁悬浮力的数学模型。
(4)将ANSOFT有限元软件和虚位移法推导出的电磁推力及磁悬浮力的结果进行比较,证明了虚位移法建立的电磁力表达式的正确性,以及采用该方案实现数控机床无摩擦进给运行的可行性。
[1]DONG -YEUP LEE,CHUN -GIL JUNG,KANG -JUN YOON.A study on the efficiency optimum design of a permanent magnet type linear synchronous motor[J].Transactions on Magnetics,2005,41(5):1860-1863.
[2]卢琴芬,叶云岳.混合励磁直线同步电动机的磁场与推力[J].中国电动机工程学报,2005,25(10):127 -130.
[3]施金良,刘飞,许弟建,等.变频调速数控机床主传动系统的功率平衡方程[J].机械工程学报,2010,46(12):188 -194.
[4]王凤翔,郑柒拾,王宝国.不同转子结构无轴承电动机的磁悬浮力分析与计算[J].电工技术学报,2002,17(5):6 -9.
[5]CHOI H S,PARK I H,LEE S H.Concept of virtual air gap and its application for force calculation[J].IEEE Trans.Magn,2006,42(4):663-666.
[6]万尚军,倪光正,徐善纲,等.电动悬浮型磁悬浮列车悬浮与导向技术剖析[J].中国电动机工程学报,2000,20(9):22 -25.
[7]FU W N,ZHOU P,LIN D,et al.Magnetic force computation in permanent magnets using a local energy coordinate derivative method [J].IEEE Trans on Magnetics,2004,40(2):683 -686.
[8]李志强,罗应立.基于有限元和虚位移原理的电动机内电磁力密度计算新方法[J].中国电动机工程学报,2009,29(3):71 -77.
[9]金志颖,杨仕友,倪光正.EMS型磁悬浮列车电磁系统动态电磁场的有限元分析及其悬浮与牵引力特性的研究[J].中国电动机工程学报,2004,24(10):133 -137.
猜你喜欢
重庆理工大学学报(自然科学)(2022年9期)2022-10-26
防爆电机(2022年3期)2022-06-17
小猕猴智力画刊(2022年4期)2022-05-23
防爆电机(2021年5期)2021-11-04
防爆电机(2021年5期)2021-11-04
小学科学(学生版)(2021年4期)2021-07-23
上海大中型电机(2021年2期)2021-07-21
军事文摘(2017年16期)2018-01-19
都市家教·上半月(2017年8期)2017-08-29
中国科技教育(2016年12期)2017-08-11
