
智能切换的模型参考模糊自适应内模控制的研究
2012-09-21 06:27:48叶文通祝永华
时代农机 2012年7期
叶文通,陈 勇,祝永华
(衢州学院,浙江 衢州 324000)
1 引言
从我国发电状况来看,水力和核能发电发展很快,但由于火电发电具有投入少,工期短和见效快等优势,所以,火电发电还承担着主要的发电任务。而火电发电会涉及到发电安全和稳定高效运行等重要问题。发电厂中单元机组的大容量、高参数、高效率的发展趋势,必然会要求机组的控制系统要有较高的的控制品质和高水平的自动化程度。而大滞后、大惯性、非线性和扰动频繁等是单元机组具有的特征,运用常规控制方法已很难满足电网对机组的要求,必然要求火电控制中采用先进的智能化控制方法如:模糊、预测控制、内模控制等智能控制策略。在控制实现时,由于操作机构等的限制,控制信号的幅度及其变化率会被限制,因此必然要求在设计控制器的时候考虑控制受限的问题。文献中有利用柔化滤波器来限制控制量幅值、延长调节时间使控制量最小化等,但系统响应的快速性必然受到影响。Garcia等利用线性规划、二次规划等来处理,但算法复杂,实现困难。
因此,本文采用模型参考自适应控制的思想,结合模糊控制方法和内模控制方法,提出了一种模型参考模糊自适应内模控制方法:在相消法设计内模控制器的基础上,利用参考模型的系统误差及其变化率去调节控制器中的参数。并用带反馈校正的模型预测作系统输出预测,根据系统响应和系统预测值是否在给定误差范围内来共同决定控制量在限幅值与内模控制器输出值之间进行在线智能切换。并通过热工对象的鲁棒性仿真研究,证明其有效性。
2 模糊推理的模型参考自适应内模控制系统设计
2.1 控制系统结构
在相消法设计内模控制器的基础上,利用参考模型的系统误差及其变化率去调节控制器中的参数如图1所示。
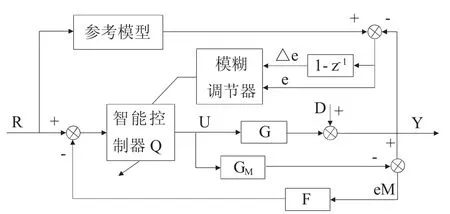
图1 自适应内模控制系统
其中,G为原始的被控对象,GM为其模型,GC是智能控制器,F为反馈滤波器,R、D和Y分别为输入、扰动及输出,eM、e和△e分别为模型误差、系统误差及其变化率。
2.2 控制器的设计
在GM准确的情况下我们可以通过对偶性来判断闭环系统的稳定性。
用相消法设计GC的思路是,将GM分解为两部分,即:GM(z)=GM+(z)GM-(z),其中,GM(z)是实际连续过程模型的传递函数加零阶保持器再离散化后得到的系统模型,GM+是模型的最小相位部分,GM-是模型的非最小相位部分。
则内模控制器GC为其中f为可实现因子,即控制滤波器,通常设一阶滤波器为
由对偶稳定性可知,GC稳定则闭环系统也稳定。而且GC能保证系统对阶跃输入和扰动稳态无差。
2.3 模糊参数调节器设计
系统误差e及其变化率△e,分别记为E,EC为输入变量;控制器参数α为输出变量。取E和EC的论域均为[-6,6],用X和Y表示:

α 的论域分 5 档,用 Z表示:Z={1,2,3,4,5}
子集记为:

E和EC及α的各模糊子集的隶属度函数见表1和模糊规则控制表如表2所示。
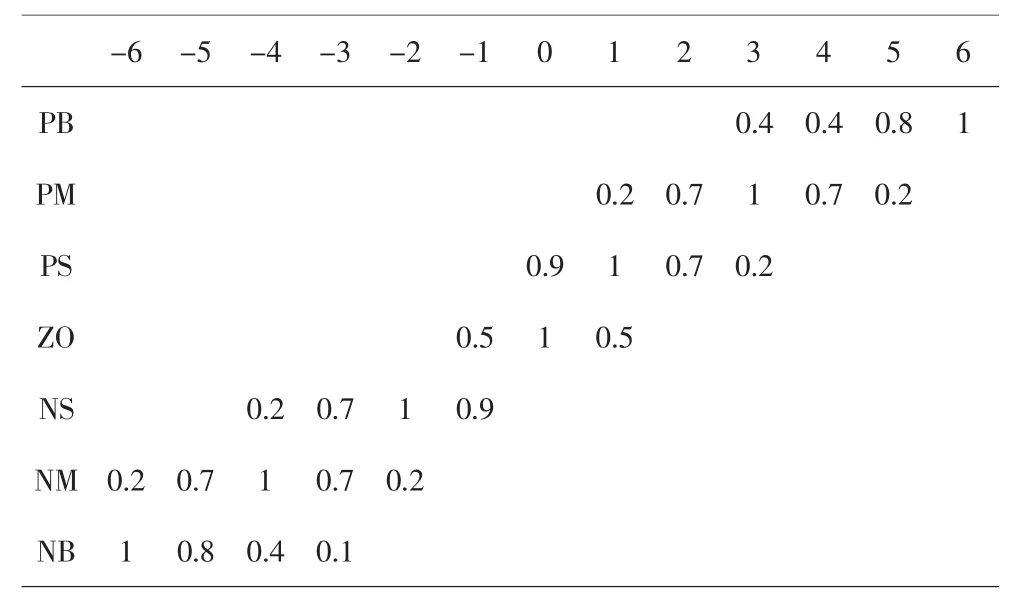
表1 E和EC的各模糊子集的隶属度函数
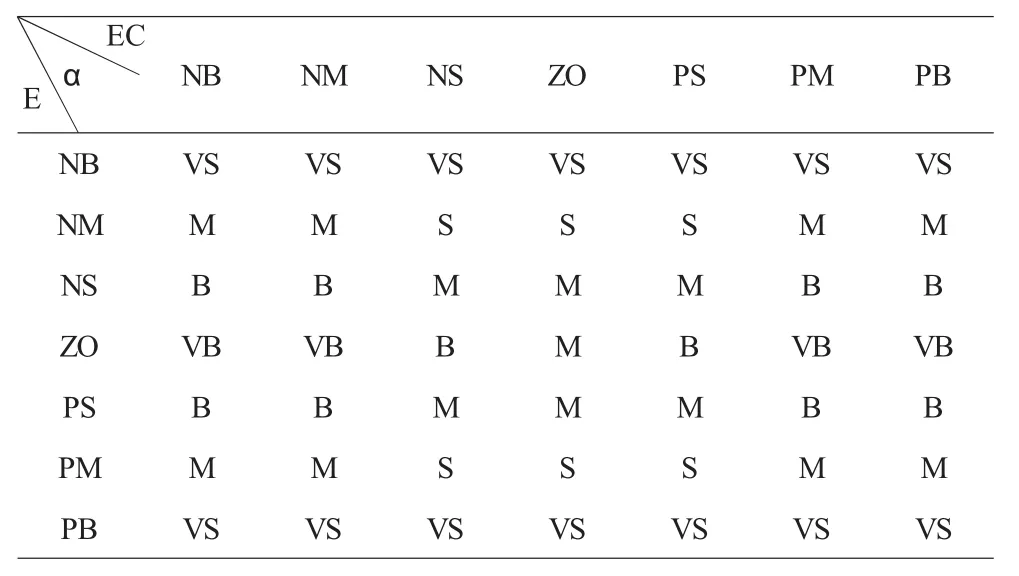
表2 模糊控制规则表
采用加权平均法对输入数据进行模糊化如表3所示。
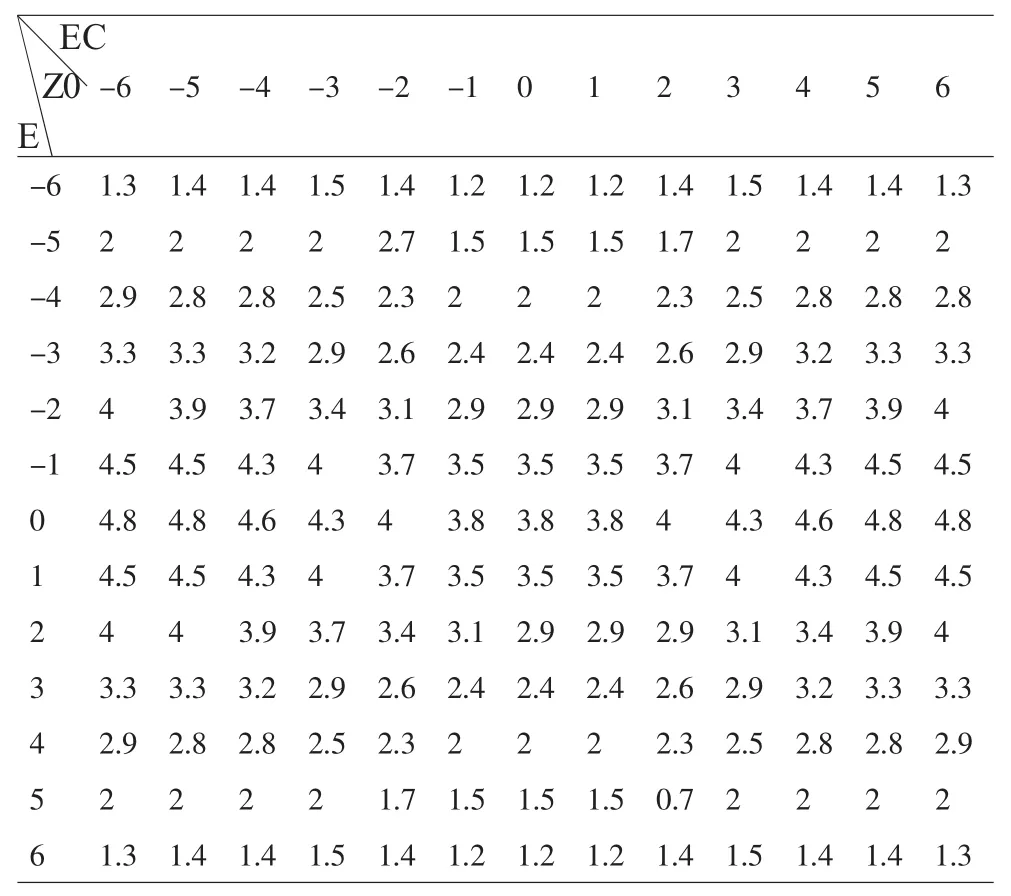
表3 模糊参数整定表
2.4 智能控制器的整定
智能控制器的系统结构图如图2所示。
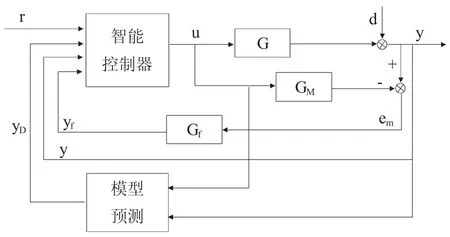
图2 智能内模控制结构图
如图3,令y1和y2分别为系统误差带的下、上限,y1'和y2'分别为系统预测输出的上、下限,y1、y2、y1'、y2'均可在线调整;y p(k+L)为系统模型预测输出值,其L表示滞后步数。
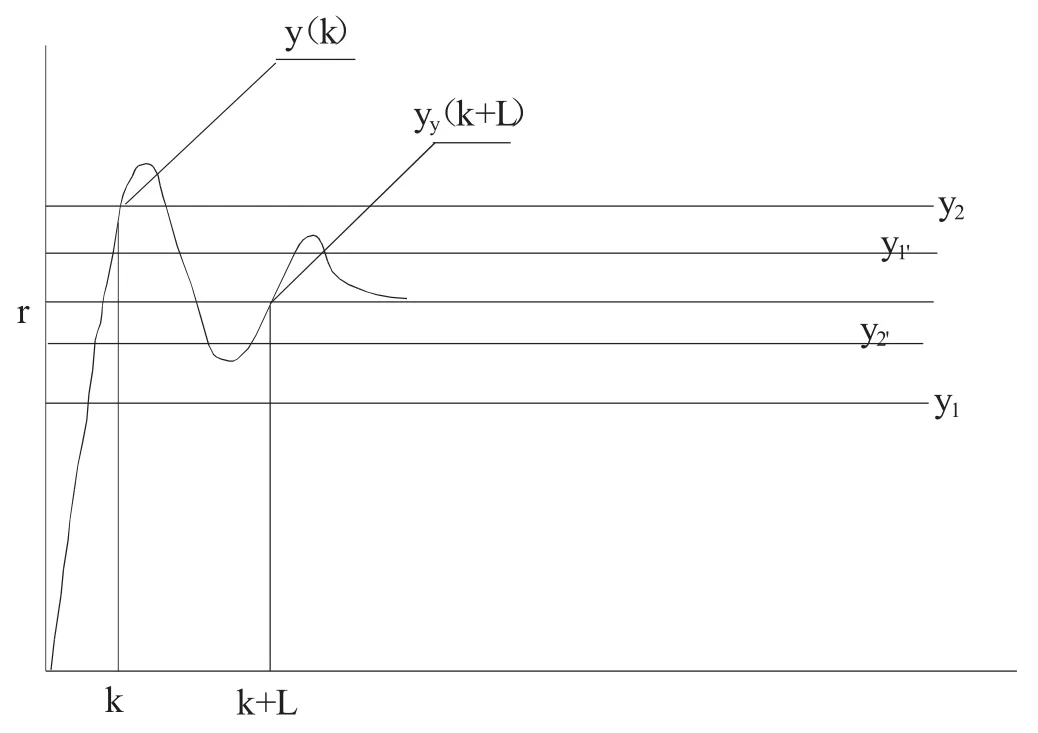
图3 输出与误差关系
采用对控制器的输出采用分段计算的方法,控制规则如下:
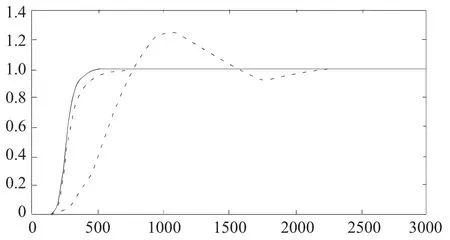
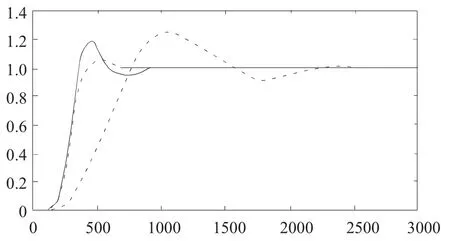
①y(k) ②y(k)>y2且yp(k+L)>y2',按最小限幅值计算u(k); ③其他均按式y=Gr×r+Gd×d=r计算控制量u(k)。 针对国内某500MW火电厂锅炉过热器一级减温被控对象动态传递函数进行在线智能调节的模型参考自适应内模控制系统仿真,并与常规内模控制系统、PID控制系统作各种性能比较。 一级减温控制系统被控对象的比例系数基本随着负荷增大而增大,而时滞常数基本随着负荷的增大而减小。文[8]由阶跃响应曲线来拟和求取传递函数,采用两点法,则被控对象的传递函数为 当 0≤u(k)≤2,取 α=0.6,在模型不变时,y1=0.75、y1'=1.8、y2=1.17、y2'=1.11,当参数发生变化时,y1=0.68、y1'=1.04、y2=1.28、y2'=0.83。 图中实线是为在线智能切换的模型参考自适应内模控制的响应曲线,小虚线是常规内模控制的响应曲线、大虚线是PID控制的响应曲线。 图4 模型匹配仿真结果 图5 模型不匹配仿真结果 仿真结果表明,在模型匹配时,PID控制系统的响应速度太慢,控制效果较差,而常规内模控制和在线智能切换的模型参考自适应内模控制能达到较好的控制效果;在模型失配时(K增大20%,滞后时间减小10%),PID控制较差,在线智能切换的模型参考自适应内模控制和常规内模控制相比较,不仅同样具有良好的快速性,而且超调小,鲁棒性好。 文章在总结自由度内模控制的调节方法和规律的基础上,在相消法设计内模控制器的基础上,利用参考模型的系统误差及其变化率去调节控制器中的参数。并用带反馈校正的模型预测作系统输出预测,根据系统响应和系统预测值是否在给定误差范围内来共同决定控制量在限幅值与内模控制器输出值之间进行在线智能切换。并通过热工对象的仿真研究结果表明,这种方法可以使系统的性能达到快速性和鲁棒性的最佳结合。其参数的在线调节的方法简单实用,具有一定的工程应用价值。 [1]Garcia C.E.,Morari.internal model control.A unifying review and some new results I&EC Process Des.Dev.,1982,21(2):308-323 [2]赵曜.内模控制发展综述[J].信息预控制,2000,29(6):526~531. [3]赵耀.直流调速系统的2自由度内模控制方法[J]电气传动,1997,27(1),41-43. [4]张井岗,吴聚华,曾建潮.模型参考自适应内模控制及其仿真研究[J].系统仿真学报,1997,9(2):38-43. [5]李成鑫.有控制限幅的模型参考模糊自适应内模控制研究:[D].四川:四川大学,2006. [6]金小峥,杨尤红.考虑有执行器故障和有界扰动的鲁棒自适应容错补偿控制(英文)[J].自动化学报,2009,(3). [7]柴天佑,张亚军.基于未建模动态补偿的非线性自适应切换控制方法[J].自动化学报,2011,(7). [8]郭巨众.模糊内模控制模糊内模控制及其在过热汽温控制中的应用[D].太原:太原理工大学,2006.3 在线智能切换的模型参考模糊自适应内模控制在过热汽温中的应用
4 结语
猜你喜欢
系统工程与电子技术(2021年8期)2021-07-27 08:39:18
北京航空航天大学学报(2017年4期)2017-11-23 05:48:25
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
系统工程与电子技术(2016年7期)2016-08-21 13:58:58
物理化学学报(2015年7期)2015-12-30 12:13:18
四川电力技术(2015年5期)2015-12-19 11:04:52
电测与仪表(2015年16期)2015-04-12 00:44:32
电测与仪表(2015年20期)2015-04-09 11:53:56
电测与仪表(2015年21期)2015-04-09 11:52:12
装备环境工程(2015年5期)2015-02-28 01:20:35
