
跨介质UAV水面滑跳转向特性建模与仿真
2012-09-19 02:04李金洪杨安强粟凌云
水下无人系统学报 2012年6期
李金洪, 杨安强, 粟凌云
跨介质UAV水面滑跳转向特性建模与仿真
李金洪, 杨安强, 粟凌云
(昆明船舶设备研究试验中心, 云南昆明, 650051)
跨介质无人驾驶飞行器(UAV)飞行处于近水面, 无法采用常规UAV的气动舵面提供转向力, 导致转向困难, 机动性较差。基于空气动力学、经典势流理论和二元平面滑行理论, 提出了UAV水面滑跳转向方法, 建立了跨介质UAV滑跳转向飞行动力学模型, 并进行了仿真计算, 重点研究了跨介质UAV滑跳转向特性及其影响因素, 给出了抑制UAV横滚的解决措施。仿真结果表明, 跨介质UAV入水角和固定舵角在滑跳转向过程中对自身姿态及其弹道形态均有较大影响。该结果可以为跨介质UAV提供方案总体设计、弹道规划、可靠性设计和控制系统设计理论依据和计算方法。
无人驾驶飞行器; 跨介质; 滑跳弹道; 转向特性; 仿真
0 引言
跨介质无人驾驶飞行器(unmanned aerial vehicle, UAV)是近年来新提出并重点研制的一种新概念多相飞行器。根据概念设计, 它融合了高速滑行艇、水上飞机和特种UAV的多重特点, 具有海空两栖特性, 能够在高海况条件下实现水面待机、水上高速滑行、水面起降、近水面滑跳机动飞行等多种状态。跨介质UAV较巡航导弹具有高机动性、多用途和复杂环境的高适应性, 面对现代高强度反导系统具有极大的突防能力。其巨大的军事用途逐渐为各主要军事大国所重视。
跨介质UAV在其特殊的机动滑跳弹道飞行过程中, 滑水机动转向由于其较高的隐蔽性和高海况下的可操作性, 可以有效躲避掠海雷达的探测, 具有良好的反侦测机动特征。但转向过程中, 受空气动力/水动力的复合影响, 力学状态复杂, 特别是UAV偏航过程中可能出现的姿态瞬时突变, 对整个滑跳机动弹道会产生巨大影响。鉴于运动特性比较复杂且课题比较新, 国内外对滑水转向特性研究均无成熟理论, 本文力图建立跨介质UAV滑水转向阶段飞行动力学模型, 并首次提出了较为可行的滑水转向运动, 重点针对滑水转向特性进行分析, 同时对滑跳入水条件对滑水转向的影响展开研究。
1 飞行动力学模型
1.1 滑水转向运动
跨介质UAV触水转向较常规转向的区别在于, 入水前在飞行器前段弹出全动转向舵, 空中飞行时, 水舵保持0°舵角, 入水前弹出舵获得固定舵角, 利用弹出舵所受水动力实现转向运动。
弹出舵动力模型主要指飞行器入水后弹出舵所受到的水动力特性, 主要为舵面受到的法向力F和轴向力F。弹出舵为矩形, 提供UAV转向的主要偏航力与力矩, 其工作示意图如图1和图2所示。按照惯例, 图1中只标出位置力。

(2)
式中:S为面元面积;为沾湿面元数量。
由于弹出舵安装位置的特点, 其法向力和轴向力均未作用于UAV质心, 因此均会产生UAV的俯仰、偏航和横滚力矩, 需要分别计算。
对整个跨介质UAV受力进行分析可知, UAV受到气动力与水动力的双重作用。当航行器在空中飞行时, 升力F, 侧向力F, 阻力F和3个通道的力矩为气动力; 当航行器进行滑水作业时, 不止受到气动力作用, 同样受到水动力影响, 其中惯性力(附加质量力)、滑水力F(X,Y)和水舵作用力F均为水动力作用力。
(a)水舵示意图 (b)水舵安装位置示意图
当UAV水舵触水时, 水舵作用在UAV的俯仰力由X和X分别所产生的力矩之和所组成, 即
M=M+M=X·H+X·H(3)
式中: 弹出舵轴向力沿UAV轴向分量

弹出舵轴向力系数
(5)
弹出舵法向力沿UAV轴向分量

弹出舵法向力斜率
(7)
其中:为机翼展弦比;H为X到质心的纵向距离;H为X到质心的纵向距离。
水舵作用在UAV上的偏航力矩由弹出舵法向力和轴向力沿UAV法向分量分别所产生的力矩之和所组成, 即
M=M+M=Z·L+Z·L(8)
式中:Z为弹出舵轴向力沿UAV法向分量;Z为弹出舵法向力沿UAV法向分量;L为Z到质心的轴向距离;L为Z到质心的轴向距离。
水舵作用在UAV的横滚力矩由弹出舵法向力和轴向力沿UAV法向分量分别所产生的力矩之和所组成, 即
M=M+M=Z·H+Z·H(9)
式中:H为Z距离质心的纵向距离;H为Z距离质心的纵向距离。
1.2 运动方程组
通过动量与动量矩定理可在弹体系建立跨介质UAV滑水转向过程的全空间运动方程组
(11)
位置力矩的有量纲系数

气动阻尼力的有量纲系数
(13)
气动阻尼力矩的有量纲系数
滑水阻力、滑水动升力、滑水动升力矩和滑水阻力矩分别为
(15)
根据二元平板滑行理论, 理想流体中二元滑行平板的下半平面流通与薄翼完全相似, 但前缘产生反射流。由于滑行平板缺少薄翼上表面的负压, 故其升力为薄翼升力的一半, 合力作用点距离前缘1/4处, 由此可得飞行器底部滑水升力系数

(17)
其中,为飞行器雷诺数。
将速度势按分量展开, 可得
(19)
由式(18)所得
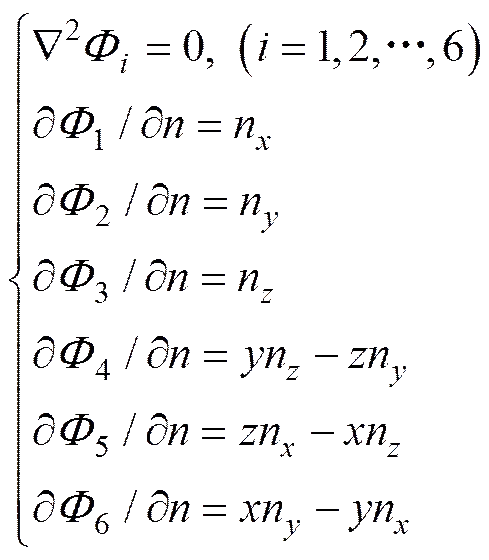
(21)
这里需要指出的是, 当飞行器触水过程中, 若速度过高, 水舵将产生自然空化现象, 因而无法保证舵的有效性。因此本文对跨介质UAV速度约束为≤0.3, 因此可以忽略空气压缩性对流体动力参数的影响。且如图2所示, 由于弹出舵面积非常小, 因此在空中段飞行时气动力在舵面作用力对UAV的影响可以通过尾部垂直舵进行修偏。
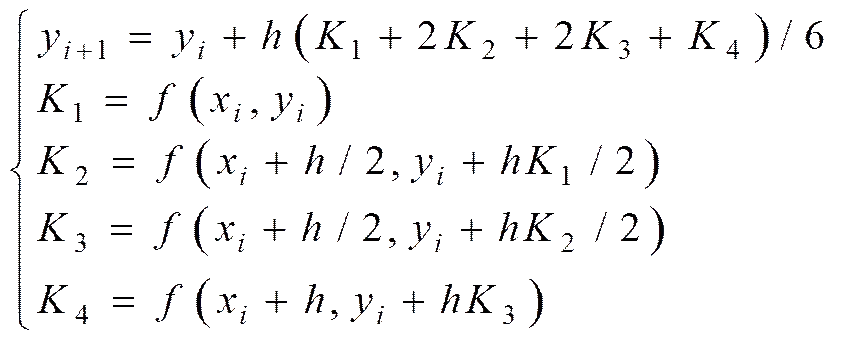
1.3 数值算法
上述偏微分方程计算无法获得解析解, 因此需要用数值算法求解, 这里采用龙格库塔(Runge-Kutta)数值算法对偏微分方程组求解。龙格-库塔方法是一种在工程上应用广泛的高精度单步算法。由于此算法精度高, 采取措施对误差进行抑制, 所以其实现原理也较复杂。该算法构建在数学支持的基础上, 本文采用4阶龙格-库塔公式对动力学模型进行数值求解
2 仿真计算及分析
2.1 跨介质UAV滑水转向弹道仿真
根据上述动力学模型对跨介质UAV滑水转向运动进行仿真计算, 图3为转向弹道曲线。
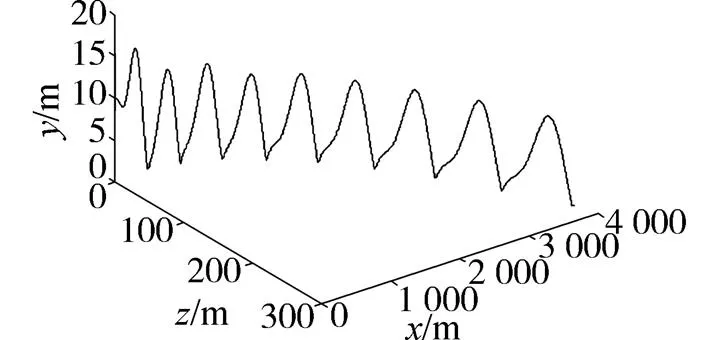
图3 跨介质UAV滑跳转向弹道曲线
跨介质UAV系统属于典型多输入多输出线性系统, 且滑跳转向弹道呈周期性变化趋势。滑跳周期分为两个状态段: 空中段和水面段, 研究滑水转向问题重点研究UAV的偏航和横滚特性。触水瞬间, 偏航角、横滚角, 偏航角速度和横滚角速度均出现突变; 水面段UAV处于持续转向状态, 偏航角和横滚角均持续增大; 当UAV脱离水面后, 飞行器基本保持出水状态后的直线运动, 直至下一次入水。由于滑跳时间较短, UAV入水滑水过程相似于一个6自由度的阶跃扰动, 作用于舵面的水动力等同于闭环系统的脉冲激励源, 故在入水滑水段内出现了明显的密集振动频率叠加区域; 空中运动段无脉冲力作用, 偏航角和偏航角速度在空中飞行段逐渐收敛, UAV处于振荡修正过程, 且自身横侧方向的流体修正作用, 对滑跳偏航能力具有一定的影响。
2.2 入水角对UAV触水偏转的影响
入水角即为跨介质UAV入水瞬间UAV体系轴向与液面夹角, 不同的入水角必然对入水姿态产生巨大影响, 从而导致UAV出水转向状态的不同。为了对控制系统提出更高的要求, 需要研究跨介质UAV入水瞬间入水角的不同对触水偏转的影响效果。本文定义两种跨介质UAV初始入水角: 1) 1.4°, 2) 3.5°。仿真结果如图4所示, 图中实线为工况1仿真结果, 虚线为工况2仿真结果。
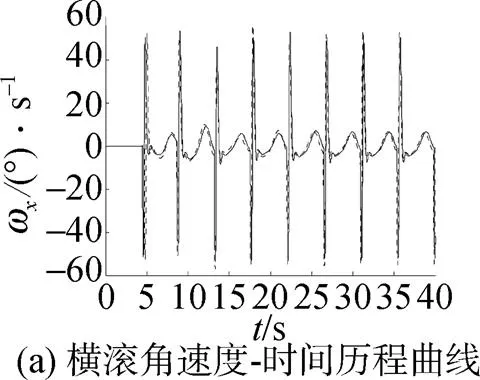
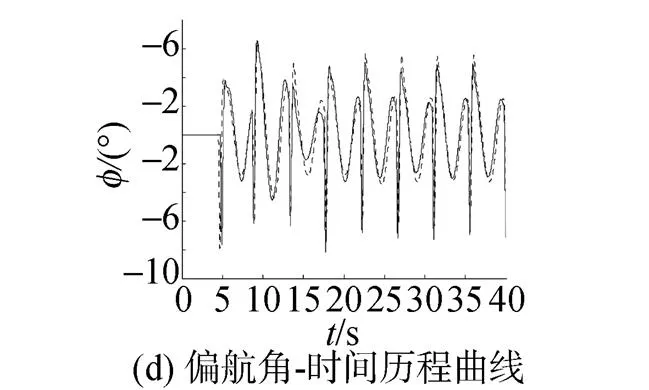
图4 入水角对跨介质UAV偏航及其横滚状态的影响
图4表现了入水角对跨介质UAV偏航及其横滚状态的影响。从仿真结果可知, 随着入水角的减小, 入水瞬间,,分别由-2.3°/s, 0.3°/s, 2.2°变化到-3.6°/s, -6.3°/s, -6.6°, 一次滑跳转向周期UAV的偏航角分别为1.8°和1.9°。
仿真结果可知, 入水角越小, 跨介质UAV侧向角速度和偏航角减小, 横滚角速度和横滚角增大。随着入水角的减小, 跨介质UAV入水起始角偏小, 在高速条件下导致短时间内的吃水较深, 固定舵上受到的横滚脉冲激励, 使UAV出现突变; 吃水深度较大也会导致UAV短时间内具有较大滑水动升力, 在动升力的作用下, UAV迅速脱离水面, 故滑水时间较短, 滑水所造成的偏航角和横滚角改变量均较小, 且静态振荡幅度也明显下降。与此同时, 减小入水角所导致的横滚角动态响应大于偏航角, 可见横滚通道对于入水角的变化更敏感, 受到的影响亦更大。综上所述, 增大入水角可以有效增大偏航角, 减小横滚角, 改善跨介质UAV可能出现的翼尖触水所导致的危险状态, 但滑水时间明显增加, 特别是在高海况下可能导致UAV倾覆。
2.3 固定舵角对UAV触水偏转的影响
弹出舵在入水前已拥有固定舵角, 入水后不再做角度上的变化, 弹出舵固定舵角的不同, 必然导致作用于弹出舵水动力的不同, 导致飞行器触水转向状态的显著不同。为了实现触水转向运动的最优设计, 需要研究飞行器弹出舵舵角的不同对触水偏转的影响效果。本文定义两种跨介质UAV固定舵角的工况: 1) 10°, 2) 15°。仿真结果如图5所示, 图中实线为工况1仿真结果, 虚线为工况2仿真结果。从仿真结果可知, 随着入水角的减小, 入水瞬间,,的分别由-2.3°/s, 2.2°/s, 2.2°变化到-48°/s, -7°/s, -7.4°, 一次滑跳转向周期UAV的偏航角分别为1.1°和1.9°。
仿真结果显示, 随着固定舵角增大, 阶跃激励增大, 跨介质UAV偏航角速度动态振荡响应明显增大, 较为有效地增加了一个滑跳周期内UAV的有效实际偏航角, 提高了偏航能力。由于偏航响应的增大, 自稳阻尼对偏航的修正亦随之增加, 导致整个偏航通道对阶跃扰动的响应幅值显著增大。但增大舵角随之带来扰动峰值的增大, 导致横滚角随之急剧增大, 与此同时, 横滚扰动依赖舵面控制而缺乏相应自稳阻尼作用, 导致在阶跃扰动后的振幅明显增大, 具有一定的非线性特征, 横滚通道对舵角的敏感性大于偏航通道, 使横滚通道动态响应特性趋于恶劣, 特别是高海况条件的滑跳弹道, 可能导致跨介质UAV翼尖触水倾覆, 从而造成整个滑跳弹道的纵向发散。综上所述, 提高固定舵角, 可以有效增加滑跳偏航能力, 改善飞行器机动性, 但随之导致横滚状态响应显著增大, 可能对跨介质UAV滑跳弹道的安全实现造成重大隐患, 因此对固定舵角的选取具有很强的区间性, 需要进行合理匹配优化。
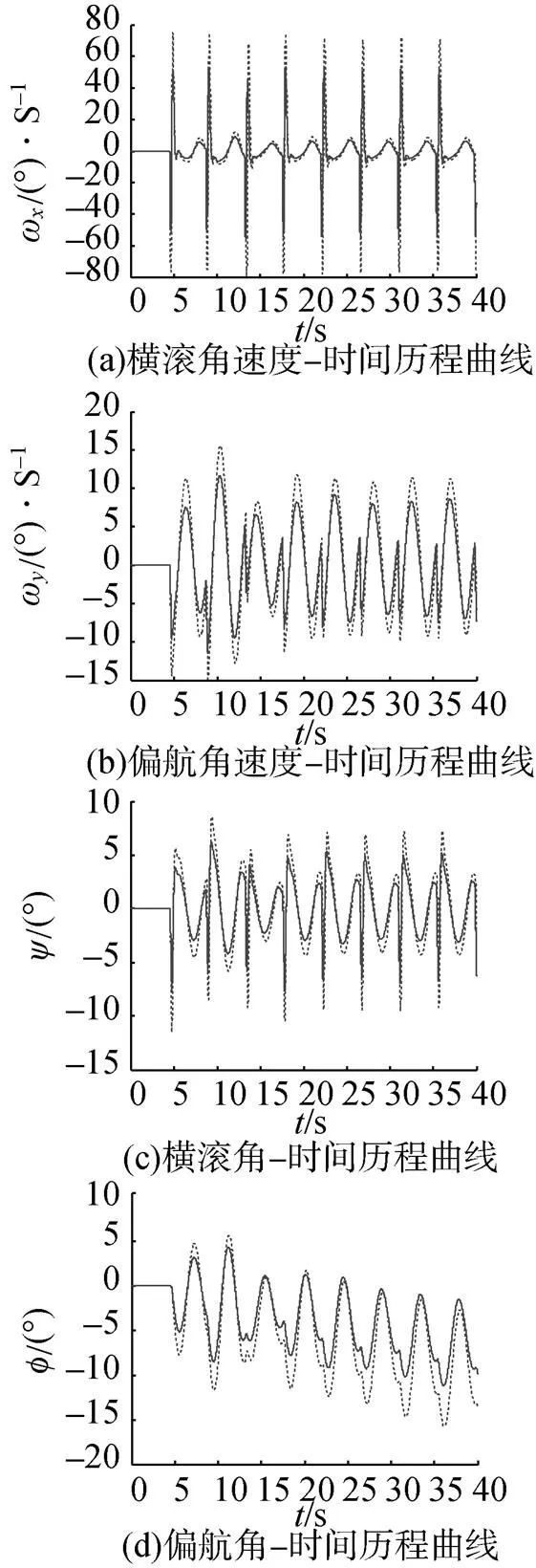
图5 固定舵角对跨介质UAV偏航及其横滚状态的影响
3 结论
本文通过建立跨介质UAV滑跳转向动力学模型和数值算法, 并对多种影响因素进行了相关的仿真研究, 表明所建模型可行。同时得到以下结论:
1) 当入水角增大时, 跨介质UAV横滚通道响应下降, 偏航通道响应提高, 能够有效改善UAV的危险飞行条件, 有利于滑跳转向飞行的实施; 但滑水时间增加, 受到的水动力特别是高海况条件下的影响程度增加, 对控制系统提出了更高的要求。
2) 弹出舵固定舵角的增大, 可以显著提高跨介质UAV触水偏航的能力, 同时使所对应的跨介质UAV偏航响应呈线性增大, 但是横滚通道响应更加敏感, 对飞行安全性有较大影响。
3) 在今后跨介质UAV设计中, 需要考虑滑跳入水角和弹出舵舵角的合理匹配, 同时需要注意UAV滑水冲击所造成的结构破坏问题及其底部可能出现的空化现象。
[1] Paul R. Hybrid Ram-Wing/Planning Craft-Today′s Race boats, Tomorrow′s Outlook[J]. Ships Engineering Service, AIAA, 2001(24): 1-8.
[2] Ghassemi H, Ghiasi M. A Combined Method for the Hydrodynamic Characteristics of Planning Crafts[J]. Ocean Engineering, 2008, 35(3-4): 310-322.
[3] Collu M, Patel M H, Trarieux F. A Mathematical Model to Analyse the Static of Hybrid (Aero Hydydrodynamically Supproted) Vehicles[C]//8th Symp.on High Speed Marine Vehicles, Naples Italy, 2008: 148-161.
[4] Savitsky D, De Lorme M F, Datla R. Inclusion of Whisker Spray Drag in Performance Prediction Method for High-speed Planing Hulls[J]. Marine Technology, 2007, 44(1): 35-56.
[5] Xie N, Vassalos D, Jasionowski A. A Study of Hydrodynamics of Three-dimensional Planing Surface[J]. Journal of Ocean Engineering, 2005, 32(13): 1539-1555.
[6] Savander B R, Scorpio S M, Taylor R K. Steady Hydrodynamic of Planing Surface[J]. Journal of Ship Research, 2004, 46(4): 248-279.
[7] Tarafder S. Third Order Contribution to the Wave-making Resistance of a Ship at Finite Depth of Water[J]. Journal of Ocean Engineering, 2007, 34(1): 32-44.
[8] 赵连恩. 高性能船舶水动力原理与设计[M]. 哈尔滨: 哈尔滨工程大学出版社, 2007.
[9] 张宇文. 鱼雷弹道与弹道设计[M]. 西安: 西北工业大学出版社, 1999.
[10] 吴子牛. 空气动力学[M]. 北京: 清华大学出版社, 2008.
[11] 王永虎, 石秀华, 李文哲, 等. 斜入水高速冲击的理论建模及缓冲分析[J]. 机械科学与技术, 2008, 27(6): 766-769. Wang Yong-hu, Shi Xiu-hua, Li Wen-zhe, et al. Modeling and Cushioning Analysis of Oblique Water Entry with High Velocity[J]. Mechanical Science and Technology for Aerospace Engineering, 2008, 27(6): 766-769.
(责任编辑: 陈 曦)
Modeling and Simulation of Dynamic Characteristics of Slide Jump Steering Trajectory for Trans-media UAV
LI Jin-hong, YANG An-qiang, SU Ling-yun
(Kunming Shipborne Equipment Research & Test Center, Kunming 650051, China)
A trans-media unmanned aerial vehicle (UAV), flying near water surface, cannot obtain steering force by conventional air rudder, which results in difficult steering and poor maneuverability of the UAV. A slide jump steering method of the UAV on water surface and a dynamic model of slide jump steering flying of the UAV are hence proposed in this paper on the basis of the aerodynamics, the classic potential flow theory, and the two-element plane sliding theory. The slide jump steering characteristics of the UAV and the influencing factors are simulated with the model and analyzed in detail. Moreover, some approaches for inhibiting UAV roll are given. Simulation results show that the water-entry angle and the fixed rudder angle of the UAV impose significant effects on its posture and trajectory pattern in the process of slide jump steering. This study may provide theoretical and calculation foundation for the UAV′s conceptual overall design, trajectory planning, flight reliability design and flight control system design.
unmanned aerial vehicle (UAV); trans-media; slide jump trajectory; steering characteristic; simulation
TJ630.1
A
1673-1948(2012)06-0401-06
2012-03-05;
2012-07-04.
李金洪(1984-), 男, 硕士, 助理工程师, 主要从事水下航行体控制系统分析与设计, 电子系统测试.
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
舰船电子工程(2020年4期)2020-06-19
智慧少年(2019年5期)2019-07-23
电子制作(2019年7期)2019-04-25
当代体育科技(2017年5期)2017-11-28
制导与引信(2016年3期)2016-03-20
中国水运(2015年2期)2015-04-23
弹箭与制导学报(2015年1期)2015-03-11
