
分布式InSAR基线转换及其误差分析
2012-09-18 02:33路瑞峰陈筠力
上海航天 2012年2期
路瑞峰 ,高 强 ,李 科,陈筠力
(1.上海卫星工程研究所,上海 200240;2.中国人民解放军海军驻上海航天技术研究院代表室,上海 201109;3.上海交通大学 电子信息与电气工程学院,上海 200240)
0 引言
InSAR是基于SAR的一种干涉测量技术。In-SAR系统利用1副天线发射雷达信号,2副天线同时接收回波或在不同时间对同一地区进行成像。由于2副天线接收的回波有一定的相干性,故经干涉处理而得的两幅图像的相位差取决于两副天线与地面目标物间的路径差,而此路径又与地形紧密关联。如地面无变形或受其他因素的影响,通过对干涉图像的相位解缠处理就可解算出每点正确的相位,再算得地面点到雷达的斜距以及地面点的高程信息[1]。分布式系统可为InSAR测量提供最佳的干涉测量基线,单航通过即可实现干涉测量,消除了单颗SAR卫星重复轨道干涉的时间去相干效应。这种基于编队卫星的InSAR系统是目前国外星载SAR干涉技术发展的热点[2]。分布式InSAR系统有效基线的长度和精度直接决定了三维测高精度。因此,有效基线的确定精度直接决定了系统最终的测量误差。有效基线的长度和精度主要取决于干涉基线的长度和精度。系统在长期轨道运行过程中,受姿态误差、GPS、天线安装误差和雷达天线相位中心的热变形误差等各种空间摄动等的影响,干涉基线会产生误差。对基线测量的研究报道较多,而涉及基线转换的却很少。为此,本文对分布式InSAR基线转换及其误差进行了仿真分析。
1 InSAR测高原理
InSAR成像的几何关系如图1所示。图中:oy为距离向方向;H为卫星的轨道高度;θ为天线波束视角;A1,A2为SAR成像的2个天线(设A1,A2均处于垂直于航向的平面内),A1用于发射和接收信号,A2只用于接收信号,由这2个天线收集的回波构成干涉数据对;r,r+Δr分别为两个SAR成像的斜距;B(A1,A2的连线)为基线;β为基线B与水平面的夹角(基线倾角);B⊥为基线B在垂直于主星波束指向方向的投影分量(有效基线),且B⊥=Bcos(θ-β),其取值直接影响InSAR数据处理和高程精度;h(y)为随地面距离y而变的地面目标高度,是InSAR成像的待测量。

图1 InSAR成像的几何关系Fig.1 Geometric relation of InSAR imaging
在SAR干涉处理中,对天线A1,A2接收信号进行SAR处理,形成2个复图像信号S1,S2,由形成亮暗条纹相间的干涉图,干涉图每点的相位φ比例于路程差Δr。此处:*表示共轭复数。由此,可建立基本关系式

式中:φ为干涉图相位(两幅图像间的相位φ1,φ2之差),φ=φ1-φ2;λ为工作波长。在式(1)~(3)中,λ,r,B,β为已知量,对干涉图进行相位解缠运算可得φ,则由式(1)可得Δr,代入式(2)可得θ,由式(3)可得h[3]。
为讨论各参数对测高精度的影响,假设各参数不相关,则InSAR测高精度可表示为

a)基线长度测量误差导致的测高误差

b)基线倾角测量误差导致的测高误差

c)斜距测量误差导致的测高误差

d)平台高度测量误差导致的测高误差

e)相位误差导致的测高误差

式中:δB,δβ,δr,δH,δφ分别为基线长度、基线倾角、斜距、高度和相位的误差。
2 基线模型建立
2.1 基线定义
编队的两颗卫星体结构几何关系如图2所示。图中:g1,g2分别为两星的测量点;S1,S2为两星SAR天线相位中心。测量基线矢量是g1,g2连线矢量,即编队卫星GPS相位中心间的连线矢量。干涉基线矢量是指目标在主星成像时刻SAR天线相位中心与辅星成像时刻SAR天线相位中心间的连线矢量,即S1,S2的连线矢量。本文讨论的基线转换是实现上述测量基线至干涉基线的转换,并仿真分析转换过程中由安装误差、热变形误差、天线安装点误差、GPS测量误差、姿态测量误差、配准误差和GPS授时误差等引起的干涉基线误差。
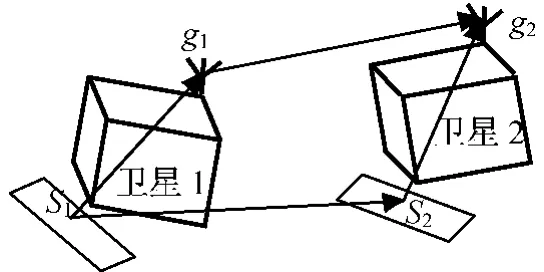
图2 编队两颗卫星体几何关系Fig.2 Geometric relation of master and slaver satellites
由图2所示卫星几何关系,干涉基线S1S2可表示为

需注意的是,上述基线为时变的。两颗卫星在分别按各自轨道运行的同时,也在作相对绕飞运动,故两颗卫星SAR天线相位中心连线构成的基线矢量为时变量。编队飞行的两星间的空间连线在垂直于卫星飞行方向的投影,构成InSAR要求的切轨基线。
2.2 测量基线至干涉基线的转换及误差源
由式(10)可知,主要误差源如下。
a)部位修正误差(由测量基线转换至干涉基线中引入的误差)
(a)GPS天线安装点位置误差,包括安装误差和热变形误差和GPS天线相位中心相对天线安装点的误差。
(b)SAR天线安装点位置误差,包括安装误差和热变形误差和SAR天线相位中心相对天线安装点的误差。
(c)姿态误差,卫星在长期的轨道运行中,受各种空间摄动等的影响会使姿态指向出现误差,姿态误差被引入转换阵中引起转换阵误差,从而影响测量基线至干涉基线的转换,最终对干涉基线的确定精度产生影响。
(d)GPS测量两颗卫星位置时引入的误差(GPS测量误差)。
b)GPS授时误差
该误差的影响有两种:第一,理想的测量基线是同时刻的GPS天线相位中心间的基线矢量,但因存在GPS授时误差,故测量基线两端实际为不同时刻,称此为测量基线的相对时间同步误差;第二,由于存在GPS授时误差,测量基线任一端的时刻都会与标准时刻存在误差,称此为测量基线的绝对时间同步误差。
c)插值误差
由于测量设备的采样频率有限(一般在数赫兹量级),须通过有效插值方法对SAR天线相位中心的位置进行插值重建,获得满足InSAR干涉测量所要求的位置间隔(一般为千赫兹量级)。插值方法的选取原则是保证由插值本身导致的误差足够小,以保证基线精度。因此,本文认为插值过程中引入的误差可忽略,仿真分析中不予考虑。
d)配准误差
星载SAR以两次有微小轨道差异的观测,获取地面同一成像目标的两幅SAR复图像,目标区域中各回波点与SAR图像中各像元点对应。由于两次成像的夹角存在较小差异,使目标区域中同一回波点在两幅SAR图像中对应不同的像元位置,即两幅图像各对应像元的位置存在偏移。因此,干涉成像处理中不能直接计算两幅SAR图像中各像元点的相位差,需对SAR图像进行配准,使两幅图像中对应的像元点位置对齐。在图像配准过程中,用某种配准方法计算两幅图像距离向与方位向的偏移量,再根据偏移量对辅图像重采样,使主图像和重采样后的辅图像中相同位置的像元点对应地面同一目标点。在此过程中,因方位向的偏移量对应主星与辅星成像时刻差Δt,配准误差会对干涉基线产生影响。
综上,干涉基线误差如图3所示。

图3 干涉基线误差Fig.3 Error of baseline interference
2.3 坐标系定义
a)地心赤道惯性坐标系E0原点为地心O0;平面X0O0Y0与地球赤道平面重合;O0X0轴指向春分点;O0Z0轴指向北极;O0Y0轴与O0X0、O0Z0轴构成右手坐标系。
b)轨道平面坐标系Ev原点为地心O0;O0Xv轴指向近地点;O0Zv轴与角动量方向重合;O0Yv轴与O0Xv、O0Zv轴构成右手坐标系。
c)卫星平台坐标系Er原点为卫星质心Ob;ObXr轴指向卫星速度方向;ObZr轴与卫星轨道坐标系方向相同;ObYr轴与ObXr、ObZr轴构成右手坐标系。
d)卫星星体坐标系Ee原点为卫星质心Ob;三个坐标轴分别与卫星的惯性主轴一致,并构成右手坐标系其中:Er系绕偏航轴(Y轴)逆时针旋转θy,绕滚动轴(X轴)逆时针旋转θr,绕俯仰轴(Z轴)逆时针旋转θp即得Ee系。
2.4 基线模型建立
在E0系中,可得干涉基线

式中:(x0,y0,z0)为卫星2相对卫星1的坐标;(Δx0,Δy0,Δz0)为GPS相对测量误差;(xg,yg,zg),(xs,ys,zs)分别为GPS及SAR天线相位中心在Ee系中的坐标;Δxaz为安装误差;Δxbx为热变形误差;Δxg,Δxs分别为GPS及SAR天线相位中心误差;下标1、2分别表示卫星1、2;θy,θr,θp分别为偏航角、滚动角和俯仰角:R为Ee系过渡至Er系的转换阵,且

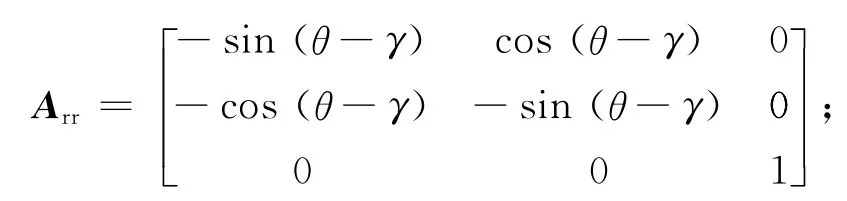
Arr为Er系过渡至Ev系的转换阵,且
Aov为Ev系过渡至E0系的转换阵,且

此处:θ为真近心角;γ为卫星的航迹角,且tanγ=,|γ|≤90°;Ω为升交点赤经;i为轨道倾角;ω为近地点幅角。
式(11)前3项为干涉基线的计算值,后11项为误差项。干涉基线的误差由这11项综合决定。
考虑配准误差及GPS授时误差对基线转换的影响,由前文的分析可知,配准误差及GPS授时误差导致构成干涉基线时主、辅星对应不同的时刻,如图4所示。
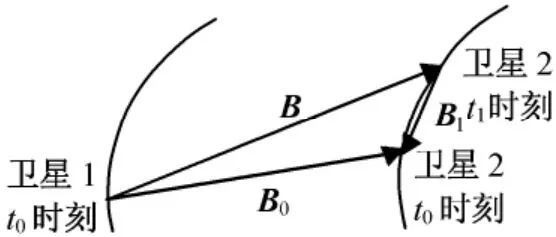
图4 配准及GPS授时误差对基线的影响Fig.4 Influence of registration error and GPS time service error for baseline
在精确计算时,可根据配准误差及GPS授时误差确定时间差Δt=t1-t0,以及轨道参数或GPS测量数据测得时刻t1=t0+Δt卫星2的位置矢量,由B=B0+B1计算干涉基线。为简化计算,用矢量vΔt替代B1,则

式中:v为卫星2的速度;Δt1,Δt2分别为由配准误差和GPS授时误差引起的主、辅星间的时间差。
3 仿真
设主、辅星姿态相同,偏航、滚动、俯仰角分别为20°,35°,40°,卫星为边长为1m的立方体,在Ee系中,取GPS坐标为(0.5,-0.5,0.5),SAR天线相位中心坐标为(-0.5,0.5,-0.5)。由式(11),可得干涉基线在E0系中的矢量表达式。为求出切轨基线的长度及倾角,需给出主、辅星的轨道根数及辅星相对主星的坐标(x0,y0,z0)。令主星在E0系中的坐标(-6 892,14.210 9,-123.851 7)km,速度矢量[-0.128 6-0.985 1-7.539 1]Tkm/s;辅星坐标(-6 891.9,13.992 0,-124.492 0)km,速度[-0.129 0-0.985 1-7.539 1]Tkm/s,则辅星相对主星的坐标(x0,y0,z0)为(5.3,218.9,640.3)m。此时,主、辅星真近心角为22.58°。
上述误差项对干涉基线影响的仿真结果见表1。由表可知:配准误差对干涉基线三轴误差的影响非常明显,这是因为在配准误差0.1像素导致的时间差Δt1内,辅星沿速度方向(更精确的说法是沿飞行轨迹向)飞行了v·Δt1=7 600×0.000 059 5=0.452 2m,误差量级达到分米级。由于时间同步精度很高,GPS授时误差对干涉基线三轴误差的影响很小。在部位修正误差中,GPS测量误差是主要误差源。另外,SAR天线相位中心误差及GPS天线相位中心误差对干涉基线三轴误差的影响也较大。安装误差、热变形误差及姿态误差由于误差量级很小,对干涉基线三轴误差的影响较小。
干涉基线是一个“三维”矢量,但对测高有影响的是一个“二维”基线矢量——切轨基线,即干涉基线在垂直于速度平面内的投影。取主星速度矢量为参考矢量,将干涉基线投影到垂直于速度方向的平面内,求得切轨基线,用Matlab软件仿真分析切轨基线长度及倾角误差,在视角为18°时,将仿真结果代入式(4)~(6)可得测高误差,仿真结果见表2。
a)视角对测高精度的影响
设误差项见表1(忽略配准误差及GPS授时误差),则不同视角的测高误差如图5所示。由图可知:测高误差随视角增大而逐渐变大。需注意的是,此处仅考虑了基线的长度和倾角对测高精度的影响,忽略了r,H,φ对测高精度的影响。

表1 源于误差项的干涉基线精度Tab.1 Baseline accuracy caused by errors
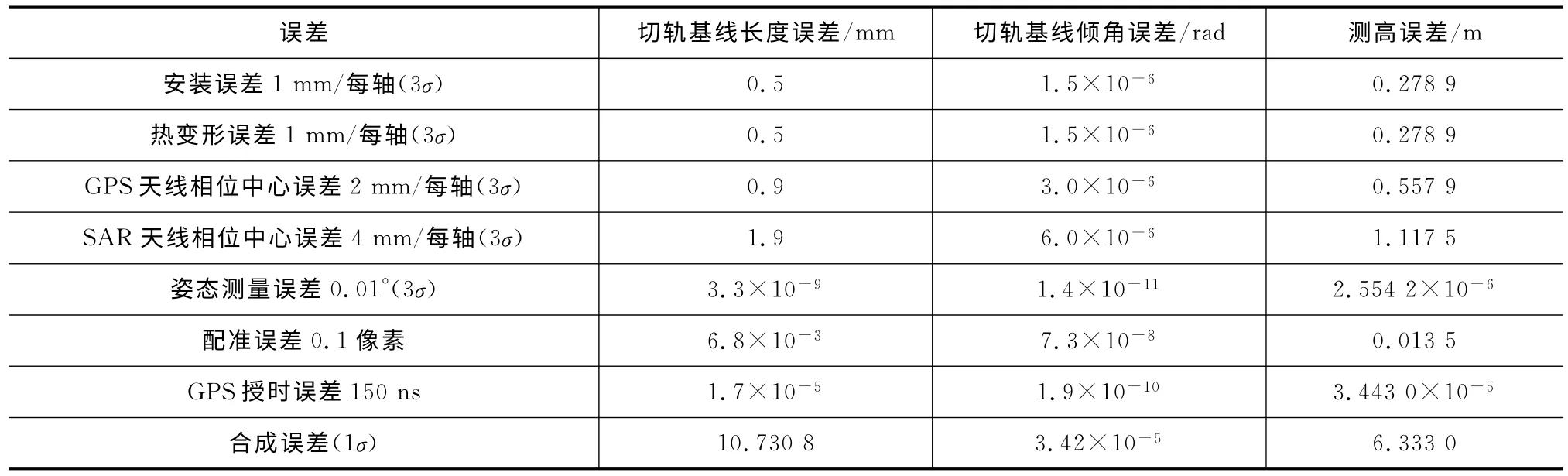
表2 视角18°时误差项对切轨基线和测高精度的影响Tab.2 Influences for cross-track baceline and height accuracy with sight angle 18°

图5 视角对测高精度的影响Fig.5 Height accuracy with various sight angle
b)切轨基线长度对测高精度的影响
设误差项见表1(忽略配准误差及GPS授时误差),则不同切轨基线长度的测高误差如图6所示。

图6 视角35°时切轨基线长度对测高精度的影响Fig.6 Height accuracy caused by length of cross-track baseline(sight angle 35°)
由图可知:测高误差随切轨基线增大而减小。
c)GPS相位中心至SAR天线相位中心间距离对测高精度的影响
由式(11)可知:GPS相位中心至SAR天线相位中心距离仅对姿态测量误差导致的基线误差及测高误差有影响,因给定的姿态精度很高,对基线误差及测高误差的影响很小(可忽略不计),故可认为GPS相位中心至SAR天线相位中心的距离对测高精度无影响。
4 结论
通过选择合适的坐标系以及对误差源的分析,本文建立了干涉基线模型,并对基线误差和测高精度进行了分析。结果发现:(1)GPS测量误差是基线转换及测高中的主要误差源,GPS测量误差10mm(1σ)可导致切轨基线长度误差10mm,切轨基线倾角误差3.2×10-5rad可导致测高误差约5.9m(视角18°时),减少GPS测量误差将显著提高测高精度。(2)SAR天线相位中心误差及GPS天线相位中心误差因误差量级较大[分别为4mm/每轴(3σ)、2mm/每轴(3σ)]对基线及测高精度也有较大影响,可产生毫米级的基线长度误差和分米级的测高误差。(3)安装误差和热变形误差因量级较小,对基线及测高精度的影响较小,安装误差1mm(3σ)可导致测高误差约0.3m,1mm(3σ)的热变形误差也将导致测高误差约0.3m。(4)如姿态测量精度能达0.01°(3σ),此时姿态测量误差对基线及测高精度的影响较小,可忽略不计。GPS天线相位中心至SAR天线相位中心的距离仅对姿态测量误差导致的基线误差及测高误差有影响,如姿态测量精度达到0.01°(3σ),也可认为GPS天线相位中心至SAR天线相位中心的距离对基线及测高精度并无影响。(5)配准误差仅对干涉基线有影响,因该误差较大(0.1像素),将产生分米量级的干涉基线误差,但由于其导致的干涉基线误差主要为沿航迹方向,对切轨基线及测高精度的影响很小,如假设主、辅星速度相同(近距离编队时),配准误差对基线及测高精度的影响近似为零,可忽略不计。(6)GPS授时误差因为同步精度很高(150ns),可认为对基线及测高精度无影响。(7)视角对测高精度的影响非常大,在各误差项不变的条件下,测高误差随视角增大而变大。(8)切轨基线长度对测高精度亦有影响,当视角为35°、切轨基线由300m增大至600m时,测高精度可提高约0.5m。
[1]孙 龙,张长耀.星载InSAR空间基线的系统设计与性能分析[J].雷达科学与技术,2007,5(2):133-138.
[2]曾 斌.分布式卫星系统中InSAR成像精度及测速精度研究[D].成都:电子科技大学,2002.
[3]袁孝康.星载合成孔径雷达导论[M].北京:国防工业出版社,2003.
[4]张光明,张晓玲,黄顺吉.分布式卫星INSAR中姿态变化对测高的影响[J].电子科技大学学报,2003,32(4):375-379.
猜你喜欢
红领巾·萌芽(2022年3期)2022-03-13
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
科学(2020年5期)2020-11-26
舰船电子对抗(2019年6期)2019-04-27
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
北京航空航天大学学报(2017年9期)2017-12-18
舰船电子对抗(2016年5期)2016-12-13
电子制作(2016年21期)2016-05-17

- 上海航天的其它文章
- 基于H∞控制理论的电动负载模拟器多余力矩抑制