
复杂背景中红外弱小目标检测技术研究
2012-09-18 02:33赵峰
上海航天 2012年1期
赵 峰
(中国人民解放军驻上海无线电设备研究所军事代表室,上海 200090)
0 引言
红外图像处理中弱小目标检测是难点。由于小目标亮度低,所占像素点很少,形状和面积信息均不明显,目标检测难度大,而背景的复杂性更增大了小目标检测的难度。近年来,为有效检测与跟踪红外图像序列中弱小目标,相继提出了各种算法,主要可分为基于空域信息的单帧目标检测与基于时域信息的多帧关联目标检测算法两类[1]。基于空域信息的检测利用目标像素强度检测出目标,通过序列图像投影获得目标运动轨迹,即跟踪前检测(DBT)算法;基于时域信息的目标检测算法对假设航迹包含的点作相关处理,经若干帧累计后获得检测结果与目标的航迹,即检测前跟踪(TBD)算法。
由于单帧图像中目标的信噪比和信扰比很低,DBT类算法对剧烈干扰中的弱小运动目标的检测效果较差。TBD类算法能沿目标运动轨迹积累目标能量,有效利用目标与背景像素在时间轴方向上的特性差异提高信杂比,增加目标检测率,对目标的最大帧间运动速率约束小。但该类算法是基于一系列对应像素点的操作,故存在像素点配准需要,对成像平台的稳定性提出了较高的要求。基于空域信息的DBT类算法能避免此问题,且计算量小。本文综合两类算法,对一种组合时域与空域特性的红外序列图像中运动点目标检测算法进行了研究。
1 目标检测
1.1 最大中值预处理
红外背景图像预处理技术主要包括空域和频域滤波,目的是消除噪声和背景信号对后续目标探测与跟踪的影响。与其他空间滤波器相比,中值滤波器能在衰减噪声的同时不使边缘模糊,但中值滤波慢于一般的卷积运算,因为需对模板中所有像素灰度进行排序。本文采用一种改进的最大中值滤波预处理技术:选择模板尺寸为奇数,分别求取行、列,以及对角线方向的灰度中值,以这4个中值的最大值为模板的计算结果。该滤波模板在保证不影响边缘锐度的条件下减少了中值计算中需排序的像素数。用原始图像减去最大中值滤波结果,较好抑制了所得的残差图中平滑背景,有效提高了信杂比。
令x为输入图像,y(m,n)为经大小为2N+1的最大中值滤波模板获得的输出图像,则定义

式中:z1~z4分别为算得的行、列,以及对角线方向的灰度中值,且

1.2 时域方差滤波
时域滤波广泛用于红外图像目标探测,能有效增强目标的信噪比,提高检测率。由大量实验数据可认为,绝大多数条件下红外图像的时域噪声分布符合高斯模型[2]。本文的时域方差滤波方法也基于该条件。
时域方差滤波方法为:对最大中值滤波预处理后的图像序列,当前帧的每个像素值由前T帧的时域方差递归算得,有

式中:(σt)2,μt分别为每个像素的时域方差及其均值,且μt=。从当前帧每个像素的时域方差值中减去图像序列中前一帧的估计方差,差值图像即为输出。在差值图像中,噪声像素输出接近于零,而由于位置的关联性,当前帧中疑似目标像素的方差值会明显增强。输出残差图像中每个像素值

对目标运动速度大于1像素/帧的图像,该方法能较有效去除大面积云层、小面积快速运动云层的干扰,减少单帧图像中的高频噪声,降低虚警率。
1.3 自适应分割
经滤波处理后的图像,信噪比有明显改善。本文用直方图对时域方差滤波后的图像进行自适应分割。
图像直方图能描述原始图像的灰度层次,从而确定不同灰度区域。一个区域类通常对应直方图中的一个峰,但直方图中的每个峰不一定都对应一个区域类,可能从属于邻近的一个峰。在滤波图像中,背景像素一般在直方图中占有大部分的亮度值,而噪声像素和目标点稀疏地分布在高亮区域。因此,在滤波后图像的直方图中,常出现波谷,波谷的深度被称为视觉对比度。若按一般的门限选取方法,将视觉对比度最大的位置设为分割门限,则不一定能正确地将目标与背景分离,因为此时门限过高,目标就会丢失;门限过低,又会造成分割后的可能目标点过多,影响后续处理的速度。因而有必要确定对应于应分割区域类的峰(如用直方图)[4]。首先对直方图进行平滑,求直方图一阶差分,找到其由正至负的过零点,然后确定初始的区域类数,再根据以下准则判断独立峰:有一定的灰度范围;应有一定的面积(尽可能排除噪声点);有一定的峰谷比。
依据上述准则确定独立峰,也就确定了分割的门限。对可能是目标的点,保留灰度值,其余点的灰度值为零。通过门限分割消除一些不可能为目标的孤立噪声点和大面积的连续区域,此时所得区域中有真实的目标点和少数的噪声点,以及少数的亮背景区域,形成一个去除部分背景干扰和弱噪声的目标图像序列。在后续处理中,利用时域多帧关联检测运动的连续性,对该图像序列可检测出目标经过的像素点。
2 基于形态学算子的目标检测
为比较算法的性能,本文用基于形态学算子的目标检测算法对复杂背景中的红外弱小目标进行检测。
图像形态学运算中,“腐蚀”运算的作用是消除物体边界点,而“膨胀”算法是“腐蚀”的对偶运算,可以说是一种“包装”运算,即在原图像的外面“包”上一层。其实质是将结构元素与原图像“合并”。假设结构元素在原图像上移动,若原图像中无结构元素中的像素点,则在原图像中按结构元素添加像素点,故图像的膨胀运算会使原图像变大。数学形态学的其他运算均由“腐蚀”和“膨胀”两个基本运算组合而成,其中最重要的是“灰度开”和“灰度闭”运算。前者先进行腐蚀运算,再进行膨胀运算;后者先进行膨胀运算,再进行腐蚀运算。
设f(x,y),b(x,y)为二维离散空间F,G上的2个离散函数,其中f(x,y)为灰度图像,b(x,y)为结构元素,则f(x,y)关于b(x,y)的形态变换如下:
a)膨胀
b)腐蚀

c)开运算

d)闭运算

式中:Db为b(x,y)的定义域。
开运算有消除灰度中小于结构元素的“突起”或“山峰”的作用,而闭运算作用相反。因此,选择合适的结构元素,用灰度开运算可将图像中的点目标和孤立噪声点消除,实现背景预测。如将输入图像减去对其灰度开的结果,所得就是灰度图象中尺寸小于结构元素的高亮度的点目标、孤立噪声点及少数高梯度背景边角。在形态学中,上述操作即为Top-Hat算法,记为

经Top-Hat法运算后,图像中的目标点由于其在小邻域内对比度高,可用图像自适应分割算法对目标点作标记,一些邻域内对比度较高的干扰点同时也会被标记,这些需要利用多帧中目标特征的不变性进行判断。
3 实验
为检验算法的有效性,本文对海、空背景的红外图像进行小目标检测实验,时域方差滤波和基于形态学算子滤波,以及最终目标检测结果分别如图1~2所示。由图可知:用最大中值滤波与时域方差滤波组合不仅能去除平滑背景的影响,提高信杂比,而且可较好地滤除电磁干扰噪声,降低在时域检测算法中的虚警率。此处,中值滤波模板选择N=2。在时域方差滤波结果图中,由于目标能量的多帧积累,有效抑制高频噪声干扰。两种图像均能获得较好的目标识别结果。
为评价时域滤波和形态学滤波算法的背景抑制和去噪性能,定义信杂比和信噪比分别为

式中:μs为目标亮度均值;σcn,σn分别为图像背景与噪声的标准差及标准差[3]。定义滤波后信杂比的增益为

式中:下标out,in分别表示输出和输入。因小目标在图像中所占的尺寸比例非常小,故认为有目标的图像标准差与无目标的图像标准差相同。时域方差滤波和形态学滤波算法处理前后原始图像和滤波图像的信噪比和信杂比见表1。
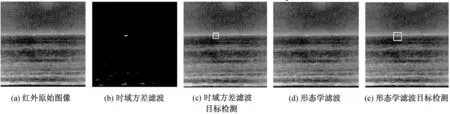
图1 海背景小目标检测Fig.1 Small target detection in sea background

图2 空背景小目标检测Fig.2 Small target detection in sky background

表1 时域方差滤波前后图像的信噪比和信杂比Tab.1 Signal to noiseration and signal to clutter before and after variance of time-domain filtering
4 结束语
综合时域与空域信息,本文研究了复杂背景中红外图像序列中弱小目标识别技术,对在两种不同背景中获得的红外图像进行了基于时域滤波与形态学算子滤波算法的性能验证和比较。实验结果表明两种算法均能正确检测出目标,本文的最大中值滤波与时域滤波算法组合能更有效地增强图像的信噪比。在海天背景中的弱小目标检测中,因海杂波的边缘点的亮度和运动特性与运动目标相似,不易与小目标区分,识别概率低于空背景中的点目标检测,为此还需要后续研究。
[1]许 彬,郑 链,王永学,等.红外序列图像小目标检测与跟踪技术综述[J].红外与激光工程,2004,33(5):482-487.
[2]SILVERMAN J,CAEFER CE,DISALVO S,et al.Temporal filtering for point target detection in staring IR imagery:II.recursive variance filter[C]//Proc SPIE Conference on Signal and Data Processing of Small Targets,[s.l.]:[s.n.],1998,3373:44-53.
[3]SUN X C,ZHANG T X,LI M.Moving point target detection using temporal variance filter in IR imagery[C]//Proc SPIE Conference on Signal and Data Processing of Small Targets,[s.l.]:[s.n.],2007,67861Z-1.
[4]袁志伟.图像分割和目标识别的算法研究[D].长沙:长沙国防科学技术大学,1992.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
哈尔滨工程大学学报(2021年10期)2021-11-05
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
军事运筹与系统工程(2019年4期)2019-09-11
宇航计测技术(2019年1期)2019-03-25
电子制作(2018年16期)2018-09-26
雷达学报(2017年6期)2017-03-26
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
