无人直升机着舰模拟台控制系统设计
2012-09-15 05:12何剑钟廖智麟申焕萍
直升机技术 2012年2期
何剑钟,廖智麟,申焕萍
(中航工业直升机设计研究所,江西景德镇 333001)
0 引言
无人直升机着舰模拟台是在着舰试验中为规避风险而在路基上模拟舰船运动的试验平台,它是一种6-DOF(自由度)的 Stewart并联机构[1]。相比其他6-DOF机构,Stewart机构具有精度高、刚度大、受力合理、速度高、响应快等优点,因此这种机构得到了广泛关注和研究,并成功用在了多自由度要求的飞行模拟器、船舶舰面模拟器及其他各类大负载的运动模拟。本文针对此种无人直升机着舰模拟台,进行运动学逆解后,提出一种基于PAC可编程自动控制器的数字PID闭环控制策略,使6个伺服电动缸能同时实现闭环控制,各缸协调运动即可模拟舰船的纵摇、横摇、振荡等单项或复合运动。
1 运动学分析
本文所研究的着舰模拟台机构简图如图1所示,它由上下两平台及并联连接两者的6根伺服电机驱动杆组成。这6根驱动杆都可以独立地自由伸缩运动,其两端分别用虎克绞与上下平台连接。平台的姿态是通过对6个伺服电动缸的协调控制来实现摇摆台上平台沿空间x、y、z轴的平移和绕各轴的转动[2]。
在上下平台分别建立静坐标系O-xyz与动坐标系O1-x1y1z1,静平台各虎克铰的中心分别为Bi(i=1,2,3…6),动平台的虎克铰中心分别为bi(i=1,2,3…6),则它们在各自坐标系中的向量可表示为OBi、O1bi,并设姿态变换矩阵R为
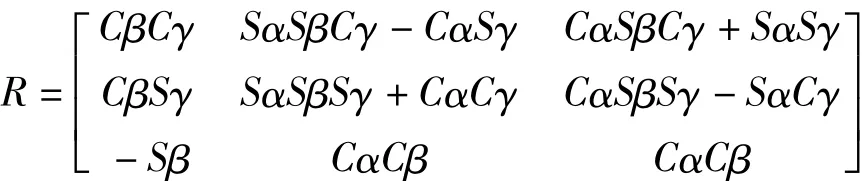
式中的α、β、γ分别是动平台中心 O1绕 x、y、z轴的旋转角。由此建立该机构的各支链的闭环方程:

其中Li为驱动杆的方向向量,OOi为动平台参考点O1相对于静平台坐标系原点O的位移向量。所谓的机构逆解即指用已知的动平台位置量和姿态量作为输入量来求解各驱动杆的位移量,当模拟平台的位姿为[x y z α β γ]T时,则各支链的驱动位移为

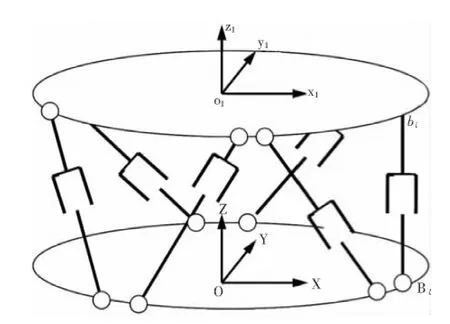
图1 Stewart机构简图
至此,完成机构的逆解分析,即把所要求的模拟台面的位置和姿态量转换成6个支杆的位移量,从而实现各伺服缸的位置伺服控制。逆解作为模拟台运动控制的底层算法,写入PAC控制器内。
2 控制系统设计
着舰模拟台控制系统是以一种基于WINCE 5.0的可编程自动化控制器[4]为控制核心,采用PID算法前馈控制与伺服驱动器的位置伺服相结合的闭环控制模式,经CAN总线传输至伺服驱动器实施RTS控制。该系统的特点是在嵌入式PAC工控系统进行底层运动算法和PID数字控制算法,结合了IPC高速数据处理传输能力和PLC可靠性等优点,利用PAC的CAN总线耦合器进行快速的DA转换,实现对6个伺服电动缸位置的模拟量控制。相比专用运动控制卡结合驱动器的控制策略,此种解决方案不仅节省了成本,而且提高了开发效率及控制的可靠性。
2.1 控制系统原理
图2所示为控制系统的原理简图,以PAC作为运动控制核心,运用梯形图或各种其他高级编程语言,将运动算法、离线轨迹规划、控制模式和逻辑定义通过PAC提供的Modbus TCP协议下的函数接口写入PAC底层软件,PAC将解耦的各缸位置数字量通过CAN总线分别传送给2个扩展的模拟量DA模块(4通道的I8024),转换后各通道的模拟量通过驱动器对6缸进行同步与协调控制,使平台平稳地实现舰船的纵摇、横摇、振荡等运动效果。为了提高系统的安全性,系统用垂直陀螺和位球栅尺测量平台的位移和姿态,通过扩展的隔离开关量输入模块I8040W32反馈PAC,然后通过串口或网线传输给触摸屏、监控PC和无人直升机飞行控制系统,进行监控或着舰时机判断。
运动平台的6台伺服电动缸为相对独立的伺服控制回路,每一回路包括伺服电动缸、伺服驱动器、编码器、A/D模块、I/O模块和控制器PAC,构成快速高精度数字闭环控制系统,如图2所示。在每一回路中,伺服缸的计算机伺服控制是一种离散化的采样控制技术,即将连续的伺服缸位移指令信号按一定的采样周期离散化,在每一个指令周期内,将缸的位置指令信号视作常量,由伺服控制算法、D/A及A/D转换器、伺服驱动器和伺服电动缸构成的伺服控制回路在一个指令周期内实现:
1)根据位置传感器反馈信号与指令信号比较,计算出差值;
2)控制器的数字控制算法根据该差值计算出对于伺服缸的驱动信号;
3)该信号经D/A转换和脉冲转换后发给伺服驱动器,经功率放大器放大后驱动电动缸运动,并控制位移量和运动方向。
在一个指令周期内进行采样、比较、运算、功放、驱动、缸运动,再采样,再比较,反复迭代后形成了闭环反馈控制。该种闭环控制的周期要比指令周期小得多。因此,在一个指令周期中,通过高速反复的闭环迭代,使伺服缸最终到达指令位置,然后再进入下一个指令周期,对下一个阶跃信号进行闭环控制,从而使伺服缸实现预定规律的运动。
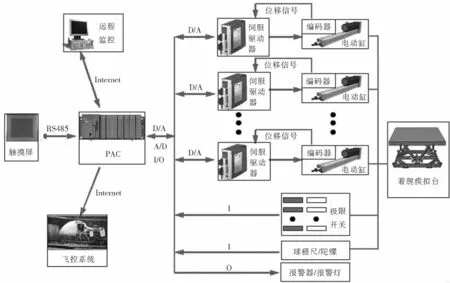
图2 控制系统原理图
2.2 控制律设计
各伺服缸的控制系统采用基于数字PID控制律的位置闭环控制策略。PID控制是现今应用最广泛、最成熟的控制算法,可用位置信号的积分和微分实现各缸位置的精确控制[3]。
PID控制就是首先将底层软件运算得到的控制指令与电动缸编码器反馈的实际位置响应进行比较,得出偏差e(t),然后对偏差的比例ke(t),偏差的积分进行控制,将u(t)作为输入量,从而纠正偏差,如图3所示。

图3 单个伺服电动缸的闭环控制原理图

其中,图2中的r(t)为给定量,式中kp为比例系数,Kpl/Ti为积分系数,KPTD为微分系数。在PAC控制器中,使用的是数字PID控制律,就是对上式离散化。离散时,令
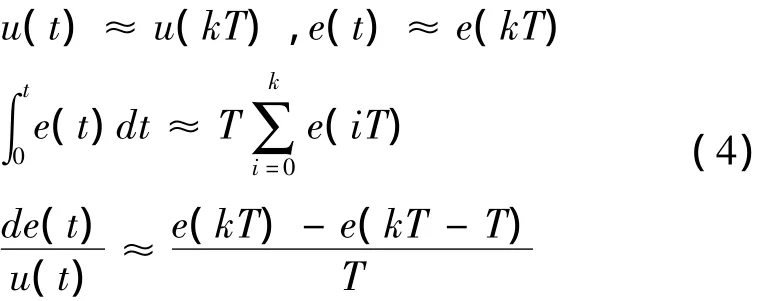
式中,T为采样周期,当T足够小时,就保证了模型离散化的精度。于是,离散化的PID控制律为:

2.3 控制软件设计
着舰模拟台监控软件总体结构如图4所示,各模块功能介绍如下:
1)通信模块:通过CAN总线实现对数字量和模拟量信号的输入和输出;
2)运动控制模块:运动逆解算法、轨迹规划、运动模式、运行逻辑等;
3)电动缸驱动模块:PID算法、数据缓存处理、脉冲转换、软件限位等;
4)电动缸测试模块:对电动缸进行在线测试和调试;
5)人机对话模块:通过人机界面(如图5所示),用户可设置着舰模拟台的运动参数、工作状态和运行参数;
6)故障诊断报警模块:主要负责开机设备自检、设备状态监测及故障报警。
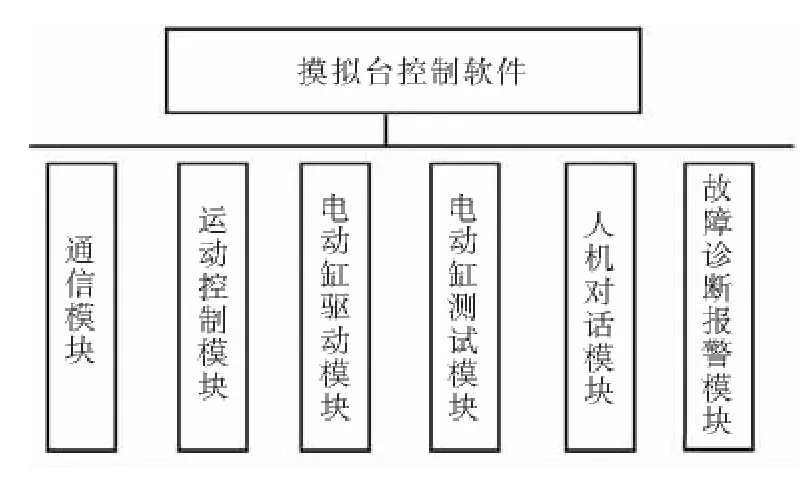
图4 软件总体结构图
3 结束语
本文所设计的无人直升机着舰模拟台控制系统,充分利用了PAC可编程自动控制器的多函数接口、高速数据处理传输能力和高可靠性等优点,为6个伺服电动缸的实时运动控制提供了一个性价比更高的设计开发平台。在某型无人直升机的着舰试验中,验证了该系统具有良好的实时控制能力和运动稳定性,达到了±0.01m的位置控制精度,实现了预期的模拟效果,图6所示为着舰模拟台实物图及模拟4级海况下模拟台台面横摇、纵摇的运行曲线。

图5 监控界面
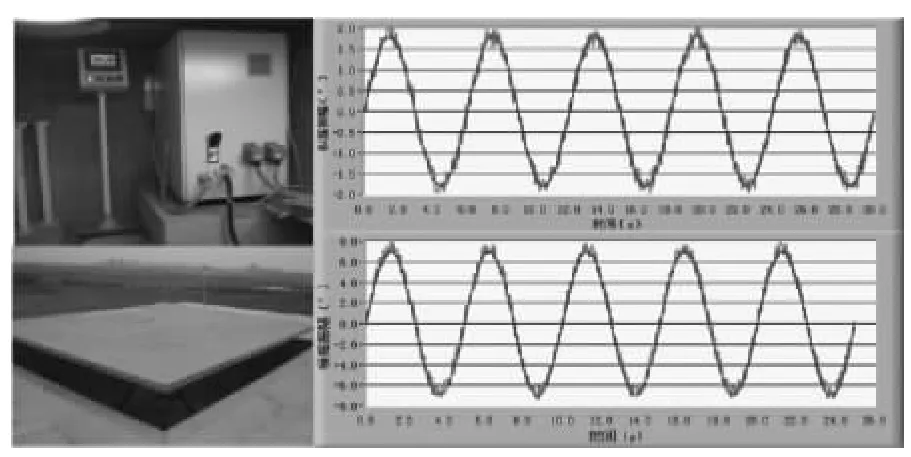
图6 着舰模拟台及模拟纵摇和横摇正弦图
[1]STEWART DA.Platform with six degree of freedom[J].Proc.On institution of Mechanical Engineering,1965,18(1):371-386.
[2]郝轶宁.并联六自由度电液伺服摇摆台的控制研究[D].北京:北京理工大学,2003.
[3]陶水华,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,1998.
[4]刘素一.基于Wincon8000的机械高压液压设备测试系统的研制[J].武汉:武汉科技学院学报,2010.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
北华大学学报(自然科学版)(2021年3期)2021-07-13
学校教育研究(2020年11期)2020-06-08
电脑爱好者(2020年6期)2020-05-26
电子制作(2018年11期)2018-08-04
北京航空航天大学学报(2017年5期)2017-11-23
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
科技传播(2015年20期)2015-03-25
西安航空学院学报(2014年5期)2014-07-13