
空间微重力地面模拟试验系统智能控制器设计
2012-09-03 06:13齐乃明张文辉霍明英
哈尔滨工业大学学报 2012年1期
齐乃明,张文辉,马 静,霍明英
(1.哈尔滨工业大学 航天学院,150001哈尔滨,hit-zwh@126.com;2.东北农业大学 工程学院,150001哈尔滨)
在地面建立模拟太空的微重力环境来验证空间机器人的性能已成为最有效、最经济的手段.世界各国模拟太空环境的方式到目前为止主要有[1-2]:悬吊法,水浮法、气浮法、自由落体运动法.悬吊法是通过吊丝的垂直拉力来平衡机器人自身重力,但该方法系统复杂,吊丝易倾斜晃动,上方导轨布局复杂困难,且只能试验轻载机器人,否则运动阻力更大,重力补偿精度不高.美国卡耐基梅隆大学研制的SM2地面试验系统[3]采用此方法.自由落体法是在高空上或者近真空的落塔(例如著名的德国不莱梅落塔)中令试验目标物做平抛运动,缺点是造价昂贵、试验时间短.目前国内外已很少使用,NASDA曾在日本微重力试验室进行过此类研究[4].水浮法是指利用水的浮力来平衡机械臂自身的重力,通过精确调整漂浮器的浮力,使目标物所受的向上水浮力与向下重力平衡.水浮法易受水的阻力和紊流的影响,成本高,且要求试验期间密封性非常好.马里兰大学研制的Ranger试验系统[5]及哈尔滨工业大学研制的宇航员太空模拟系统采用此方法.气浮法是目前空间机器人微重力环境模拟应用最广泛的方法,是利用气浮轴承,将机器人托在平整光滑的平台上,利用喷气悬浮力抵消机器人的重力.气浮法结构简单,承载能力大,且具有建造周期短、费用低、易于实现、零重力模拟精度高等优点.目前美国斯坦福大学建造的自由飞行空间机器人系统[6]及哈尔滨工业大学为空间研究院研制的多套空间机器人地面模拟系统均采用气浮方法.然现有气浮法只能在水平面上进行二维仿真试验,而飞行器姿态运动复杂,展开部件不仅要完成水平展开,且竖直方向及多自由度旋转方向均要完成展开动作.现有微重力模拟方法已不能满足需要.目前仅文献[7]提出一种采用气浮与气缸结合的方式用于三维微重力模拟的试验方案,该方案忽略了气源本身压力不稳及气缸本身很重的因素,且该方案仅用于微型机器人,大的附加重量会加剧对空间机器人的性能测试影响,另外,该方案采用的神经网络算法需要大量样本学习,这些都影响了工程应用价值.
本文针对以上方案的不足,提出了一种新型的三维空间微重力模拟装置.水平方向采用气悬浮技术,竖直方向采用机电驱动的恒力控制方式来实时抵消目标的重力,电机作为其质执行器件,经减速器后,通过滚珠丝杠及导向杆作为其传动装置.考虑到在竖直方向上外界非线性驱动力干扰机机械传动部件的摩擦非线性,为提高控制精度,采用基于神经网络的等效滑模控制策略来自适应学习并补偿各种不确定及非线性影响.实验结果表明了该地面试验装置对于三维空间微重力具有较高模拟精度,且能够应对各种非线性因素的影响,对于做复杂运动的空间机器人的微重力模拟试验具有很高的工程应用价值.
1 空间微重力地面模拟系统力学模型
由于三维空间复杂运动均可以分解为水平及竖直两个方向的运动,因此系统主要由一套电机驱动系统及机械传动系统组成,并通工作板处的压力传感器形成1个恒力伺服系统,三维空间微重力环境地面模拟系统如图1所示.
所设计的三维空间微重力地面模拟装置的主要工作原理为:
1)气足为整个直推式三维升降气足提供水平零重力模拟环境;
2)伺服电机带动丝杠进行旋转,是实现位置伺服的执行机构;
3)制动器用于出现故障或需要紧急停止时对电机进行紧急制动;
4)丝杠被电机带动,并推动螺母进行竖直升降.螺母与丝杠配合,将丝杠的螺旋运动变成螺母的竖直升降运动,螺母与螺母托板固连,带动螺母托板竖直升降运动;
5)导向杆与直线轴承形成微重力模拟装置的竖直导向,使螺母托盘不随丝杆而转动;
6)支撑杆将上层托板与螺母托板固连,实现上层托板与螺母托板的竖直升降;
7)压力敏感器用于测量压力信息,实现压力反馈,通过控制器的处理,产生控制信号控制电机,实现三维运动零重力模拟.
将机械传动系统、力传感器、接触试件(空间机器人)都看作是质量、阻尼、刚度模型.则地面模拟设备与环境的接触可以粗略用图2表示[8].
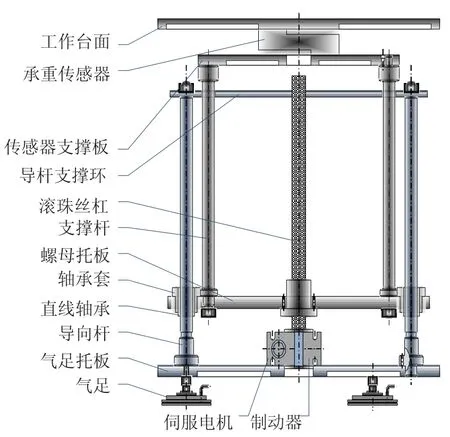
图1 三维空间地面模拟试验设备结构
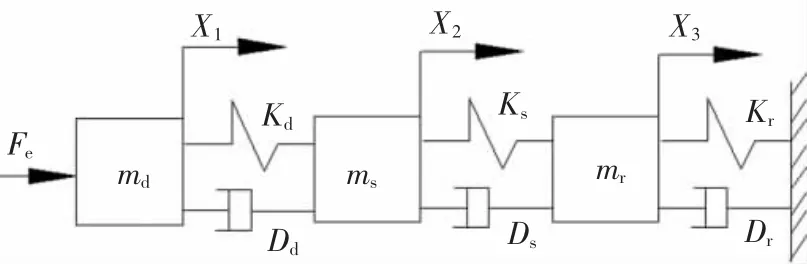
图2 力系统动力学模型
图2给出了试验设备/传感器/环境在1个方向上的模型.md、ms、mr分别为地面设备机械传动系统、传感器、接触空间环境的质量,{Kd,Dd}、{Ks,Ds}、{Kr,Dr}分别是它们的刚度及阻尼系数.据图2可建立其输入 /输出方程为
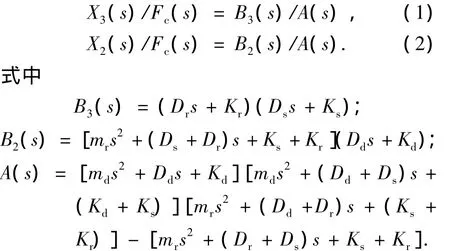
由刚度控制得传感器的测量力Fs输出为

将式(1)及式(2)代入上式得

2 微重力模拟系统的神经滑模控制器
考虑到试验目标只身的本体会施加给试验目标的非线性驱动力,且执行机构及机械传动机构本身的摩擦等各种非线性因素,整个系统出现较强的非线性.若采用传统的控制算法,系统很难在较大工作范围内实现精确控制.滑模控制具有响应速度快、鲁棒性强的特点,但存在抖振现象.而RBF神经网络属于局部泛化网络,能够快速学习系统不确定信息[9],将二者结合起来能够有效提高系统控制精度,并抑制抖振现象.
因此本文提出了一种基于神经网络的等效滑模控制.等效滑模神经网络控制可以在满足滑模稳定条件的基础上,采用RBF神经网络对不确定性及外部干扰进行自适应补偿,起到鲁棒控制器的作用.由于环境刚度远大于传感器刚度,忽略传感器动力学参数,针对被控模型,进行简化,不失一般性.则传动系统接触环境的系统被控模型为
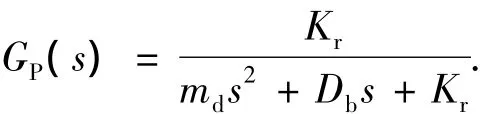
其中:Db=Dd+Dr为综合阻尼系数,Dd为地面传动系统速度阻尼系数,Dr为接触的环境的速度阻尼系数,Kr为环境的刚度.
将上式转化为状态方程为
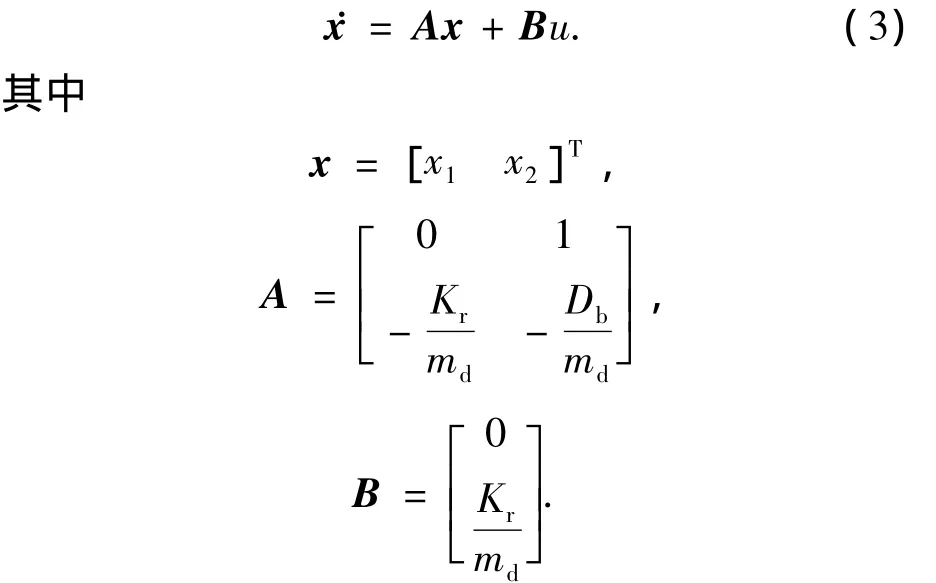
将状态方程式(3)转化为离散状态方程为

其中 x(k)= [x1(k)x2(k)]T.
将离散状态方程式(4)转化为离散误差状态方程为

式中r(k)为力指令,dr(k)为力指令变化率;e(k)为误差,de(k)为误差变化率,
误差及其变化率为
切换函数定义为

当滑模达到理想状态时

由于

根据式(6)~式(8),得

总控制律为

其中unn(k)为RBF网络的输出.
设X=[x1x2]=[s(k)ds(k)]为网络输入,这里

网络隐含层输出为

式中hj为高斯函数,且

其中 Cj= [cj1cj2]T,bj= [bj1bj2]T,m 为隐含层个数.

这里wj为权值.
神经网络的学习指标为

则由式(5)及式(6)
根据梯度下降法,神经网络权值学习算法为
其中:i=1,2;η为学习速率;α为惯性系数.
3 应用实例与分析
任何复杂的三维空间运动,均可以分解为水平二维与竖直一维的三维运动.考虑到很多空间机构都有展开运动,常见的展开运动为伸展臂的回旋运动,由A位置运动到B位置,如图3.
不失一般性,本文主要针对这种三维运动进行分析,试验目标机械臂运动的整个过程共分3部分,第一部分由位置A启动,经平移到位置B.第二部分由位置B经旋转运动到位置C,此过程同时出现平移及竖直高度的上升.第三部分在位置C处抓取了一物体,此时试验目标相当于突然加载.
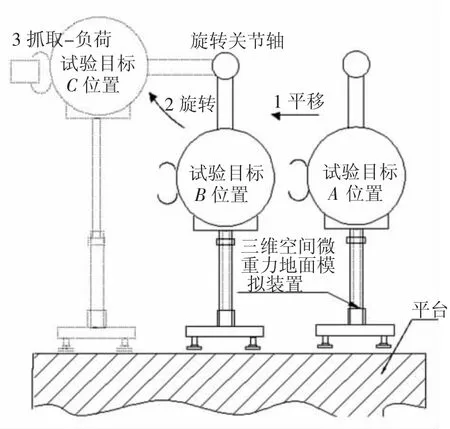
图3 运动模型
当试验目标做这种三维复杂空间运动时,旋转轴必将再施加给试验目标一驱动力,其在竖直方向必然受到驱动力分力ΔF,则拉力传感器输出为

当存在重力补偿误差的情况下,

联立以上两式得ΔFq=ma-δF.理想的微重力情况下ΔF=ma.
控制的目的是使δF=0,从而达到理想的零重力状态.本研究系统的模拟目标为重量为1 kN空间目标机器人,零重力模拟时间为10 s,采样时间为0.001 s.在0~1.5 s时,地面模拟装置由启动支撑,到完成平移动作.1.5~4.5 s为旋转关节旋转,带动模拟目标旋转,完成平移和升降,其旋转驱动力在竖直方向的分力为ΔF=50sin(2πt).在4.5 s时,目标机器人抓捕成功,其总重量变为1.2 kN.整个过程受到摩擦力f=3sin(πt)的影响.
神经网络结构取2-6-1结构,网络学习参数取η=0.60,α=0.2.网络初始值及高斯值均在(-1,1)之间随机选取.Kr=8,md=5,Db=2.图4~图7分别为采用RBF神经网络的等效滑模控制方案所得的张力控制曲线、等效控制器控制输出及神经网络控制器输出曲线.
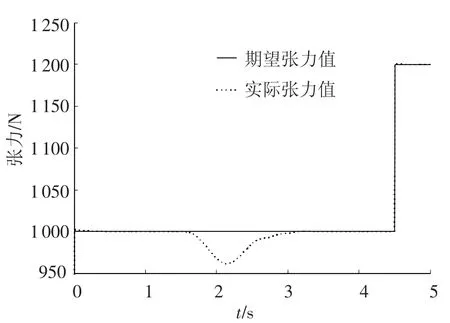
图4 张力跟踪曲线
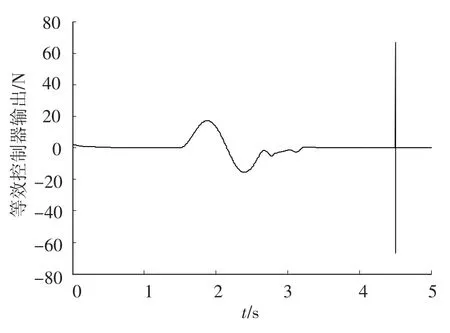
图5 等效控制器输出
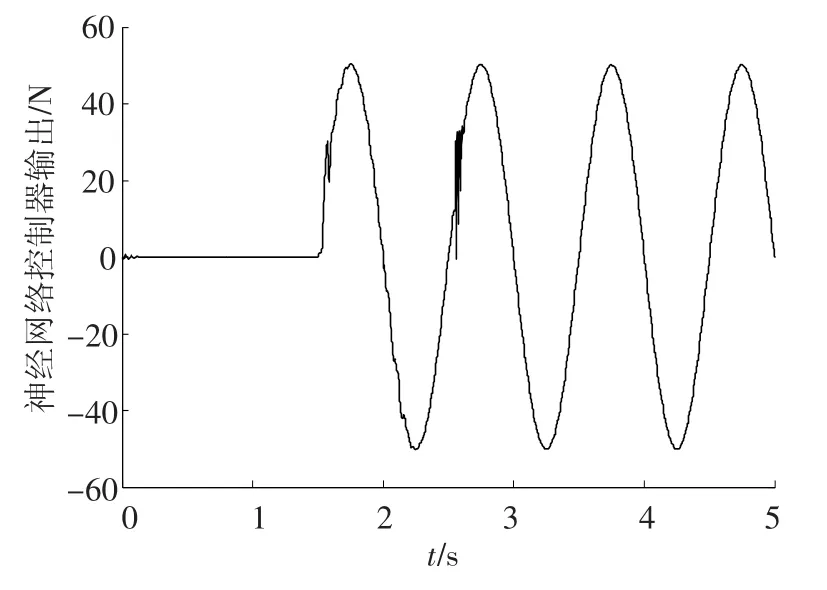
图6 神经网络控制器输出
由图可以看出,张力控制从初始时刻,大约0.25 s后即达到了精确补偿重力.且初始控制误差不大,约为5 N.在1.5 s时由于在竖直方向受到非线性的驱动分力影响,控制误差增大,但在不到2 s的时间内就抑制了影响,并达到了很好的补偿精度.在4.5 s抓捕成功后,控制器能够快速响应,并达到了很好的零重力控制效果.整个过程控制力矩不大,且当出现干扰时,滑模等效控制器能够快速响应.考虑到空间机器人为保持其姿态,通常运行于低速工况,这为神经网络的学习提供了时间,能够应对实时性及非线性要求.
进一步仿真发现,采样周期及神经网络的学习率对控制效果有较大影响,采样效果越大,控制精度越差.神经网络的学习率增大时,收敛加快,控制效果会变好,但过大的学习率会引起系统振荡.
4 结论
本文设计了一种机械传动的三维空间微重力地面模拟系统,经减速器后,通过滚珠丝杠及导向杆作为其传动装置.考虑到摩擦非线性及外界干扰,为提高控制精度,利用神经网络良好的学习能力及滑膜快速的动态响应优点,提出了基于神经网络的等效滑模控制策略来自适应学习并补偿各种不确定及非线性影响.实验结果表明了该地面试验装置对于三维空间微重力具有较高模拟精度,能够应对各种非线性因素的影响,对于做复杂运动的空间机器人的微重力模拟试验具有很高的工程应用价值.
[1]徐文福,梁斌,李成,等.空间机器人微重力模拟实验系统研究综述机器人[J].机器人,2009,31(1):88 -96.
[2]史士财,吴剑威,崔平远,等.空间机械臂全局反作用优化及地面试验研究[J].机器人,2009,31(3):242-248.
[3]NECHYBA M C,XU Y S.Human-robot cooperation in space:SM2 for new space station structure[J].IEEE Robotics and automation Magazine,1995,2(24):4 -11.
[4]SAWADA H,UI K,MORI M,et al.Micro-gravity experiment of a space robotic arm using parabolic flight[J].Advanced Robotics,2004,18(3):247 -267.
[5]GEFKE G G,CARIGNAN C R,ROBERTS B J,et al.Ranger telerobotic shuttle experiment:status report[C]//Proceeding of SPIE.Bellingham,WA,USA:SPIE,2001:123-132.
[6]RUSSAKOW J,ROCK S M,KHATIB O.An operation space formulation for a free-flying,multi-arm space robot[C]//Proceedings of the Fourth International Symposium on Experimental Robotics.Berlin:springer,1997:448-457.
[7]陈三风,梅涛,张涛,等.空间微重力环境地面模拟系统的控制器设计[J].机器人,2008,37(3):201-204.
[8]邱志成,谈大龙.基于加速度反馈的柔性关节机械臂接触力控制[J].机械工程学报,2002,38(10):37 -41.
[9]谢箭,刘国良,颜世佐,等.基于神经网络的不确定性空间机器人自适应控制方法研究[J].宇航学报,2010,31(1):123 -129.
猜你喜欢
科学大众(2022年23期)2023-01-30
有色金属加工(2020年4期)2020-08-20
思维与智慧·上半月(2020年4期)2020-04-13
思维与智慧(2020年7期)2020-04-09
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
福建质量管理(2018年20期)2018-11-14
水利技术监督(2017年3期)2017-06-09
小天使·一年级语数英综合(2016年9期)2016-05-14
