
基于AT89C52的电动智能小车系统设计
2012-09-01 00:18陈志楚
赤峰学院学报·自然科学版 2012年18期
陈志楚
(湖北汽车工业学院 电信学院,湖北 十堰 442001)
基于AT89C52的电动智能小车系统设计
陈志楚
(湖北汽车工业学院 电信学院,湖北 十堰 442001)
介绍一种A T 89 C 52单片机为控制核心的智能小车.本系统采用A T 89 C 52单片机为控制核心,利用超声波传感器检测道路上的障碍,使用P WM调速控制电动小汽车的自动避障,快慢速行驶,以及自动停车,并具有自动记录时间、里程和速度,自动寻迹和寻光功能.整个系统的电路结构简单,可靠性能高,实验测试结果满足要求.
AT89C52单片机;光电检测器;PWM调速;电动小车
1 前言
智能小车是能够感知环境,能够有学习、情感和对外界一种逻辑判断思维的一种智能移动机器人.智能小车的设计与开发涉及控制、模式识别、传感技术、汽车电子、电气、计算机、机械等多个学科.开展自主寻迹智能小车的研究工作,对促进控制及汽车电子学科学术水平的提高,具有良好推动作用.
本课题结合全国高等学校智能车科研项目,其中智能电动车采用A T 89 C 52单片机为核心部件进行智能控制.开始由手动启动小车,开始计时并计算里程,小车低速行驶,当经过规定的起始黑线,由红外光电传感器检测,通过单片机控制小车开始加速,通过超声波传感器检测障碍,红外光电传感器检测路面弯道情况,由单片机控制实现左右转向和避障,在电动车进驶过程中,采用动态共阴显示行驶时间和里程.系统框图如1.

图1 系统原理框图
2 单片机系统的结构与设计
A T 89 C 52是高性能C M O S的8位单片机,40个引脚,片内含8 k字节可反复擦写的F l a s h只读程序存储器和256字节的随机存取数据存储器(R A M),32个可编程I/O口,3个16位定时/计数器和8个中断源,并具有可编程串行U A R T通道,可进入低功耗空闲和掉电模式.器件采用A TM E L公司的高密度、非易失性存储技术生产,与标准M C S-51指令系统及8052产品引脚兼容,A T 89 C 52单片机适合于许多较为复杂控制应用场合.本系统采用了A T 89 C 52(图中为P 89 C 52)单片机,使用内部F l a s h和R A M作为存储器,M A X 706构成系统的看门狗保护电路,系统具体原理图见图2.
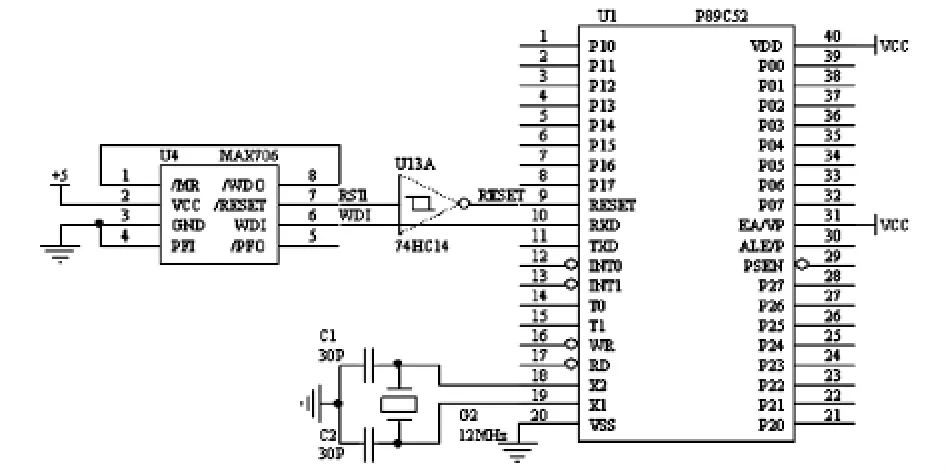
图2 单片机硬件系统原理图
A T 89 C 52外接石英晶体或陶瓷谐振器及电容C 1、C 2接在放大器的反馈回路中构成并联振荡电路.在设计中,C 1=C 2=30 P,晶振G 2选择12 M H z的石英晶体.
本设计采用M A X 706“看门狗”硬件电路.M A X 706是一种8脚封装的性能优良的低功耗C M O S监控电路芯片,其内部电路由上电复位、可重触发“看门狗”定时器及电压比较器等组成.将M A X 706的WD O连接到M R端,就可以在“看门狗”定时器溢出时产生相应的复位信号.通过单片机给WD I送输入翻转的喂狗信号,防止系统长时间“死机”.由于复位时输出低电平,而单片机需要高电平的信号,因此在后增加了一级反相器74 H C 14.
3 前向通道设计
3.1 前向通道含义
单片机用于测控系统时,总要有与被测对象相联系的前向通道.因此,前向通道设计与被测对象的状态、特征、所处环境密切相关.在前向通道设计时要考虑到传感器或敏感元件选择、通道结构、信号调节、电源配置、抗干扰设计等.在通道电路设计中还涉及到模拟电路诸多问题.本设计中,检测系统主要对小车的避障、位置、行车状态进行测量,因此选择各种光电传感器作为传感器,实现光电检测.选择好适当的传感器将需要的信号进行提取之后,为了使这些测量信号能满足计算机输入接口的电平要求,不可避免地要使用各种信号输入单元.这些包括了各种放大器或比较器方案,它们也构成了前向通道的重要部分.
在本设计中,光电传感器只输出一种高低电平信号且伴有外界杂波干扰,所以我们采用了一种数字器件——施密特触发器.施密特触发器是双稳态触发器的变形,它有两个稳定状态,触发方式为电平触发,只要外加触发信号的幅值增加到足够大,它就从一个稳定状态翻转到另一个稳定状态.施密特触发器具有与滞回比较器相类似的滞回特性,但施密特触发器的抗干扰能力比滞回比较器更强.见图3.

图3 电压比较器电路
3.2 系统各个检测电路的设计
3.2.1 加减速标志检测电路
加减速标志是在路面各设置一条2 c m宽的黑线,光线照射到路面后反射,由于黑色和白色对光的反射系数不同,可以根据接收到的反射光强弱来判断是否有黑线.利用这个原理,本系统采用反射式红外线光电传感器,安装在车底盘上前沿位置,贴近地面.正常行驶时,发射管发射红外光照射地面,光线经白色路面反射后被接收管接收,输出高电平信号;小车经过黑线时,发射端发射的光线被黑线吸收,接收端接收不到反射光线,传感器输出低电平信号.这个由高到低的电平变化被单片机处理,并选择预先编制的程序来控制小车的行驶状态.
3.2.2 行车速度检测电路
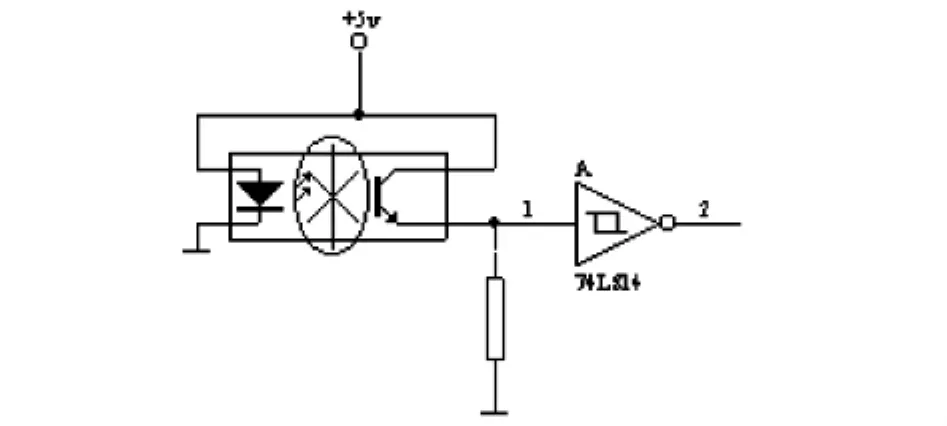
图4 行车距离检测电路
由于红外检测具有反应速度快、定位精度高,可靠性强以及可见光传感器所不能比拟的优点,故采用红外光电码盘测速方案.具体电路同图4行车距离检测电路所示.
红外测距仪由测距轮,遮光盘,红外光电耦合器及凹槽型支架组成的.遮光盘有一缺口,盘下方的凹形物为槽型光电耦合器,其两端高出部分的里面分别装有红外发射管和红外接收管.遮光盘在凹槽中转动,缺口进入凹槽时,红外线可以通过,缺口离开凹槽红外线被阻挡.测距轮每转一周,红外光接收管均能接收到一个脉冲信号,经过整形器后送入计数器或直接送入单片机中.在测距仪中并列放置了两个槽型光电耦合器实现可逆记数功能.
3.2.3 路面弯道检测电路
本系统设计两个光电三极管,分别放置在小车车头的左、右两个方向,在路面上需要转向的弯道处放置一个红外发光二极管,用来检测小车的行走方向,当弯道向左转时,红外发光二极管放置在靠近小车左侧路面,反之放置在右侧路面.当左侧光电管受到光照时,表明小车需要向左转;当右侧光电管受到光照时,表明小车需要向右转.
行车方向检测电路包括一个红外发光二极管、一个红外光敏三极管及其上拉电阻,如图5小车的方向检测电路.当没有遇到红外发光二极管时,红外光敏三极管不导通,L M 393的正输入端经过上拉电阻R 7到V C C高电压,高于其负输入端的V C C/2电压,L M 393的输出端经过10 K电阻R 9上拉到V C C.当遇到红外发光二极管时,红外发光二极管发射一定强度的红外线,红外光敏三极管在接收到反射回来的红外线后导通,L M 393的正输入端经过三极管连接到G N D,低于其负输入端的V C C/2电压,L M 393的输出端就会输出低电压,这样就会有一个由高到低的电平跳变信号.

图5 路面弯道检测电路

图6 超声波检测电路
3.2.4 障碍物检测电路
本设计采用T/R-40-12小型超声波传感器作为探测前方障碍物体的检测元件,其中心频率为40 H z,由A T 89 C 52发出的40 K H z脉冲信号驱动超声波传感器发送器发出40 K H z的脉冲超声波,当小车前方遇到有障碍物时,此超声波信号被障碍物反射回来,由接收器接收,经L M 318两级放大,再经带有锁相环的音频解码芯片L M 567解码,当L M 567的输入信号大于25 m V时,输出端由高电平变为低电平,送A T 89 C 52单片机处理.超声波检测如图6超声波检测电路所示.
4 后向通道设计
在工业控制系统中,单片机总要对控制对象实现操作,因此,在这样的系统中,总要有后向通道.后向通道是计算机实现控制运算处理后,对控制对象的输出通道接口.根据单片机输出信号形态及控制对象要求,后向通道应解决:
(1)功率驱动.将单片机输出信号进行功率放大,以满足伺服驱动的功率要求.
(2)干扰防治.主要防治伺服驱动系统通过信号通道﹑电源以及空间电磁场对计算机系统的干扰.通常采用信号隔离﹑电源隔离和对功率开关实现过零切换等方法进行干扰防治.
(3)数/模转换.对于二进制输出的数字量采用D/A变换器;对于频率量输出则可以采用脉宽调制电路.
4.1 直流调速控制系统设计
当小车需要进行加速或减速时,就需要用到直流调速设计.具体方案有以下几种:
(1)串电阻调速系统,简称G-M调速系统.(2)静止可控整流器,简称V-M调速系统.(3)脉宽调速系统,简称P WM调速系统.
G-M系统的可逆运行是很容易实现的.但该系统需要旋转变流机组,至少包含两台与调速电动机容量相当的旋转电机,还要一台励磁发电机,设备多、体积大、费用高、效率低、维护不方便等缺点.且技术落后,因此搁置不用.
V-M系统是当今直流调速系统的主要形式.它可以是单相、三相或更多相数,半波、全波、半控、全控等类型,可实现平滑调速.V-M系统的缺点是晶闸管的单向导电性,它不允许电流反向,给系统的可逆运行造成困难.它的另一个缺点是运行条件要求高,维护运行麻烦.最后,当系统处于低速运行时,系统的功率因数很低,并产生较大的谐波电流危害附近的用电设备.
脉冲宽度调制(P u l s eWi d t hM o d u l a t i o n),简称P WM,脉冲周期不变,只改变晶闸管的导通时间,即通过改变脉冲宽度来进行直流调速.
与V-M系统相比,P WM调速系统有下列优点:
(1)由于P WM调速系统的开关频率较高,仅靠电枢电感的滤波作用就可以获得脉动很小的直流电流,电枢电流容易连续,系统的低速运行平稳,调速范围较宽,可达1:10000左右.由于电流波形比V-M系统好,在相同的平均电流下,电动机的损耗和发热都比较小.
(2)同样由于开关频率高,若与快速响应的电机相配合,系统可以获得很宽的频带,因此快速响应性能好,动态抗扰能力强.
(3)由于电力电子器件只工作在开关状态,主电路损耗较小,装置效率较高.
根据以上综合比较,以及本设计中受控电机的容量和直流电机调速的发展方向,本设计采用了H型双极式可逆P WM变换器进行调速.
可逆P WM变换器主电路的结构式有H型、T型等类型.我们在设计中采用了常用的双极式H型变换器,它是由4个三极电力晶体管和4个续流二极管组成的桥式电路.图7为双极式H型可逆P WM变换器的电路原理图.
4个电力晶体管的基极驱动电压分为两组.V T 5和V T 8同时导通和关断,其驱动电路中U b 1=U b 4;V T 6和V T 7同时动作,其驱动电压U b 2=U b 3=-U b 1.
双极式P WM变换器的优点如下:
(1)电流一定连续;
(2)可使电动机在四象限中运行;
(3)电机停止时有微振电流,能消除静摩擦死区;
(4)低速时,每个晶体管的驱动脉冲仍较宽,有利于保证晶体管可靠导通;
(5)低速平稳性好,调速范围可达20000左右.

图7 双极式H型可逆P WM变换器电路原理图
4.2 行驶方向控制电路设计
小车的行驶方向分为前进、后退、停止、左转和右转,为了实现以上控制,在小车的两个驱动轮各安装直流电机M 1和M 2,当两台电机同速正转时,小车前进;同速反转时,小车后退;同时停转时,小车停止;小车需要左转时,右侧驱动轮正转;小车需要右转时,左侧驱动轮正转.图8分析了电机正反转的工作原理.控制电路的核心是一个双刀双掷的继电器,继电器线圈的正极接电源正极,负极通过三极管T 1控制其是否连接到地.继电器的两个公共端,1 c直接接电源正极,2 c通过三极管T 2控制其是否连接到地.

图8 继电器控制行车方向的电路图
4.3 显示电路设计
本设计中用两片4位八段数码管g e m 4561 a e作显示器, E M 78 P 458作为显示驱动器,分别显示行驶时间和行驶距离.E M 78 P 458是台湾E M C公司推出的一款高性能C M O S工艺的8位单片机.其内部有4 K*13位一次性R O M(O TP R O M),因此,用户可以方便地改进完善程序.程序代码可用E M C 编程器写入芯片.它具有运行速度高、功耗极低、抗干扰能力强、程序保密性好等一系列特点,特别是它内部带有1个8位的A/D转换器和2个10位的脉宽调制器P WM 1、P WM 2,使得它在智能化仪器仪表和自动控制领域中获得广泛应用.
5 软件设计
在进行微机控制系统设计时,除了系统硬件设计外,大量的工作就是如何根据每个生产对象的实际需要设计应用程序.因此,软件设计在微机控制系统设计中占重要地位.对于本系统,软件更为重要.在单片机控制系统中,大体上可分为数据处理、过程控制两个基本类型.数据处理包括:数据的采集、数字滤波、标度变换等.过程控制程序主要是使单片机按一定的方法进行计算,然后再输出,以便控制生产.本系统软件采用模块化结构,有利于程序编写和调试.因篇幅限制,本文中只给出主程序流程图.
5.1 程序设计
主程序主要完成(1)小车初始化后启动,进而转入低速行驶;(2)光电传感器判断是否有黑线,如果有则加速;(3)行驶过程中,通过超声波、光电传感器等判断路障和路面转弯情况,由单片机控制小车避障和转向.同时由L E D显示里程和时间.软件流程图如图9所示.
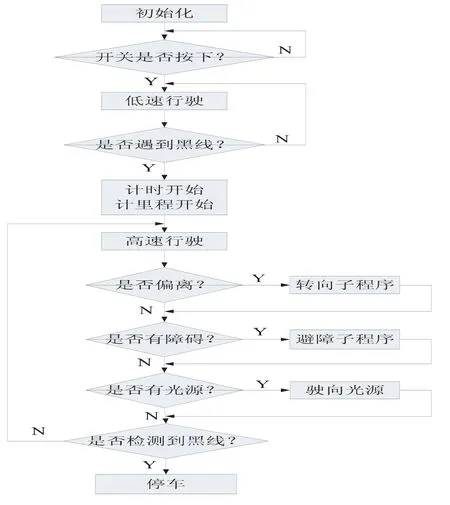
图9 主程序流程图
5.2 软件抗干扰技术
提高玩具车智能控制的可靠性,仅靠硬件抗干扰是不够的,需要进一步借助于软件抗干扰技术来克服某些干扰[6].在单片机控制系统中,如能正确的采用软件抗干扰技术,与硬件干扰措施构成双道抗干扰防线,无疑为了将大大提高控制系统的可靠性.经常采用的软件抗干扰技术是数字滤波技术、开关量的软件抗干扰技术、指令冗余技术、软件陷阱技术等.本设计中采用了编程指令冗余技术和多路传感器数据采集延时等方法保证了系统的正常运行.
6 结语
本设计采用A T 89 C 52单片机为控制平台的智能小车,能够根据道路标识行驶,并利用超声波传感器、光电传感器等对道路的障碍、弯道等路况辨识,使用P WM算法实现小车弯道和速度控制.控制效果和稳定性比较好.如果增加相应的硬件设备,小车可实现更高级、更智能、更复杂的功能.但是如何融合和处理各类传感器采集信息,如何对小车实现更有效的控制,需要我们在实践中不断探索研究.
〔1〕徐科军.传感器与检测技术[M].北京:电子工业出版社,2004.119~124.
〔2〕王兆安.电力电子技术 [M].北京:机械工业出版社,2000.150~158.
〔3〕何希才.新型实用电子电路400例[M].北京:电子工业出版社,2000.60~65.
〔4〕赵负图.传感器集成电路手册[M].北京:化学工业出版社,2004.590~591.
〔5〕陈伯时.电力拖动自动控制系统(第二版)[M].北京:机械工业出版社,2000.127~130.
〔6〕张毅刚,彭喜元.新编MCS-51单片机应用设计[M].哈尔滨:哈尔滨工业大学出版社,2003.25~27,411~417.
〔7〕何立民.单片机应用系统设计[M].北京:航天航空大学出版社,2000.2~5,46~50.
〔8〕李广弟.单片机基础[M].北京:北京航空航天大学出版社,2001.56~64.
〔9〕贾伯年.传感器技术 [M].南京:东南大学出版社,1992,78~90.
〔10〕王俊杰.检测技术与仪表[M].武汉:武汉理工大学出版社,2002.101~108.
〔11〕Harashi ma F.Power electronics and motion control[J]. Proceedings of IEEE.1994,82(8):1107~1111.
〔12〕Bord D.M,Novotny D.W.Current Control of VSIPWM Inverter[J].IEEE Trans.1985,21(2):210~218.
T P 216
A
1673-260 X(2012)09-0048-04
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
电子制作(2019年13期)2020-01-14
中学生数理化·中考版(2019年10期)2019-11-25
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2019年24期)2019-02-23
文苑(2018年22期)2018-11-19
电子制作(2018年17期)2018-09-28
