
Kalman滤波和EM算法对M-to-M信道的参数估计
2012-09-01 00:18李新年
赤峰学院学报·自然科学版 2012年18期
李新年
(伊犁师范学院 文理系,新疆 奎屯 833200)
Kalman滤波和EM算法对M-to-M信道的参数估计
李新年
(伊犁师范学院 文理系,新疆 奎屯 833200)
本文将在随机微分方程(S D E)建立的M-t o-M状态空间模型基础上,通过对该线性模型进行离散化,然后利用离散K a l m a n滤波对其状态空间进行估计,最后,再利用基于滤波的E M算法对该离散空间模型参数进行估计.
EM算法;Kalman滤波;M-to-M;随机微分方程
1 M-to-M随机状态空间模型
对于M-t o-M信道,有很多种随机形式可用于同相和正交分量所得到的状态空间表达式,具体选择主要取决于实际应用.由此我们将选择更为一般的线性状态空间模型,通常随机状态空间表达式为:

其中:X(t)=[XI(t)TXQ(t)T]T

其中y(t)为信号的观测值,X(t)为可变的同相和正交分量,v(t)为连续时间下的观测噪声.
2 M-to-M信道模型的离散化
下面将利用E M算法和K a l m a n滤波器,通过估计M-t o-M信道模型参数和状态来描述整个过程.下面我们对模型进行离散化[6]:

下标k属于序集{0,1,…},xk∈R2n为离散时间状态限量,yk∈R1为离散时间观测向量,ωk∈R2为离散时间时间状态噪声,vk∈R2为离散时间观测噪声,Ak=Φ(tk+1,tk),其中Φ(t,t0)为(25)式的基本矩阵,

噪声过程ωk和vk假定为独立零均值和单位方差的高斯过程.
系统参数θk={Ak,Bk,Ck,Dk}和状态是未知的,但可以利用基于滤波的E M算法,从获得的观测信号YN={y1,y2,…,yN}数据估计出来确定参数,再利用K a l m a n滤波器估计出信道状态.
3 信道参数的确定
基于滤波的E M算法通过一组K a l m a n滤波器获得高斯状态空间模型的一个极大似然参数估计(简称M L E),令θk= {Ak,Bk,Ck,Dk}表示(3)中的系统参数,{Pθ:θk∈Θ}表示由系统参
k数θk诱导的一组概率测度,其中Θ为θk所在的参数空间R2n×2n×R2n×2×R2n×R2.E M算法由已知的数据Yk计算系统参数θk的M L估计,E步由所给完全数据来估计对数似然函数的条件期望

其中θk表示在时间k时估计的系统参数,极大化后发现:

求期望和对其进行极大化,一直这样进行下去,模型参数序列收敛到实际参数.E M算法描述如下:

其中E(·)表示期望算子.(6)式为模型(3)中的每一次迭代都给出了E M参数估计,而且,因为)在θk和是连续的,在似然曲面上E M算法收敛到一个驻点,从而参数可以通过条件期望计算出来[6]:
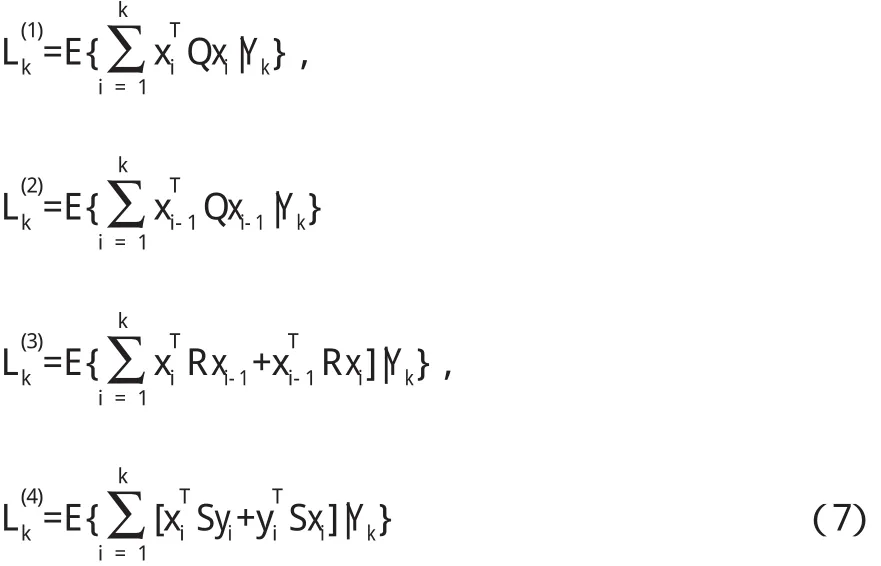
ei为欧几里得空间中的单位向量,例如考虑2 n=2时:

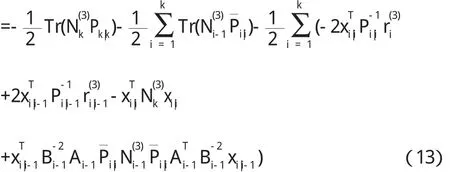
估计得出:
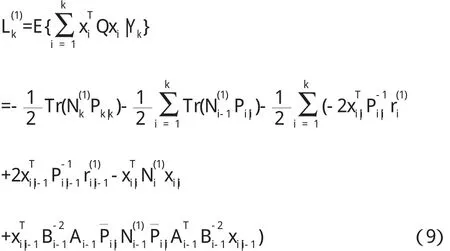
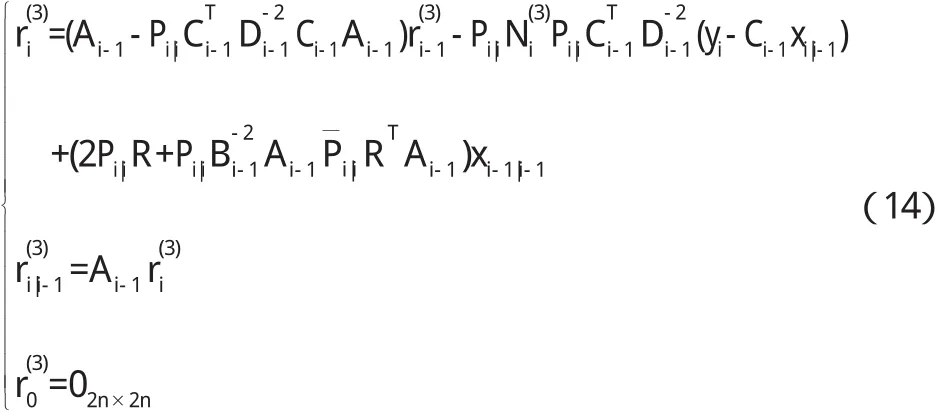
其中T r(·)为矩阵的迹,在(9)式中r(1)i和N(1)i满足下列递归式:






4 结论
系统参数θk={Ak,Bk,Ck,Dk}用E M算法进行估计,即可估计出M-t o-M随机状态空间模型系统参数.由于K a l m a n滤波器和E M算法均可由计算机编程实现,因而接下来工作将通过实验模拟现实场景,通过实验比对来验证K a l m a n滤波器和E M算法对M-t o-M随机状态空间模型系统参数估计,这将是一个非常有意义的工作.
〔1〕G.Casella,R.L.BergerStatisticalInference.2nd Edition(2002).
〔2〕G.Bishop and G.Welch,An introduction to the Kalman filters.University of North Carolina,(2001).
〔3〕J.L.Speyer and W.H.Chung,Stochastic processes, Estimation, and Control, Ralph C. Smith,North Carolina State University,pp.197-201(2008).
〔4〕Peter,S.Maybeck,Stochastic,models,estimation and control,New York,Academic Pr voll.2(1979).
〔5〕A.G.Zajic,G.L.Stuber,Three-Dimensional Modeling and Simulation of Wideband MIMO Mobile-to-Mobile Channels,IEEE Trans.Veh.Technol,vol 8,no.3 pp. 1260-1275,Feb.(2009).
〔6〕A.S.Akki, Statistical properties of mobile-to-mobile land communication channels,IEEE Trans. Veh. Technol.vol.43 no.4,pp.826-831,Nov.(1994).
〔7〕J.L.Speyer and W.H.Chung,Stochastic processes, Estimation,and Control,Ralph C.Smith, North Carolina State University,pp.197-201(2008).
〔8〕M.M.Olama,S.M.Djouadi,and C.D.Charalambous, Stochastic Differential Equations for Modeling,Estimation and Identification of Mobile-to-Mobile Communication Channels .IEEE Transactions on Wireless Communications,Vol.8,No.4,April(2009).
〔9〕M.Patzold.VERDIKT Project Proposal:Mobile-to-Mobile Communication Systems(M-to-M),Mobile Communicationsatthe University ofAgder(UiA), Norway,(2007).
O 241.8
A
1673-260 X(2012)09-0019-03本文将在随机微分方程(S D E)建立的M-t o-M状态空间模型基础上,通过对该线性模型进行离散化,然后利用离散K a l m a n滤波对其状态空间进行估计,最后,再利用基于滤波的E M算法对该离散空间模型参数进行估计.
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
北京航空航天大学学报(2020年10期)2020-11-14
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
统计与决策(2017年2期)2017-03-20
系统工程与电子技术(2016年7期)2016-08-21
系统工程与电子技术(2016年2期)2016-04-16
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
火控雷达技术(2016年2期)2016-02-06
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
