信息共享条件下传感器组网发现概率建模
2012-08-27 08:15:28姚佩阳周翔翔张杰勇
电光与控制 2012年11期
王 欣, 姚佩阳, 周翔翔, 张杰勇
(空军工程大学信息与导航学院,西安 710077)
0 引言
信息是决定现代化战争胜负的核心因素。利用现代网络通信技术,将分布在不同区域的各种不同类型、不同频段、不同工作模式的传感器合理配置、统一部署,形成全区域、层次化的有机探测体系,快速、准确、高效地截获和提取军事信息,掌握瞬息万变的战场态势,夺取制信息权,是信息时代战争制胜的关键。传感器组网利用信息的冗余性和互补性来弥补单传感器的不足[1],能克服独立传感器的性能局限和地势、气象等因素带来的环境约束,获得更广泛的空间、时间探测范围[2];传感器节点之间互相进行信息共享,能提高协同检测概率的正确性并减少误报的可能性[3]。
目前对传感器组网目标检测的研究,多为通过传感器组网对探测区域的重复覆盖率研究目标发现概率的提高效果,和通过数据融合检测研究目标检测虚警概率的降低效果[4],但对于传感器之间实时信息共享对检测概率造成的影响,却没有进行专门的研究。因此,本文结合搜索论[5-6]重点研究了信息共享条件下的传感器检测发现概率。
1 单传感器独立探测的发现概率
为了求取传感器在作战区域空间各点上对目标的发现概率,通常使用空间分割的方法,将作战空间进行离散化处理:高度上分为若干层,同一高度层的平面分成若干个小矩形网格,并以网格中心的发现概率作为整个网格所对应的小区域内的发现概率。作战区域的高度分层和平面分格可参照文献[1]进行。
设pi为传感器Ri的瞬时探测发现概率,即Ri以一定速度进行扫描时,扫描视场与目标在一次接触条件下的发现概率,pi与探测距离有关,在有效探测范围内,可用形如pi=e-aidi的函数表示[7];di为在笛卡尔坐标系下,探测目标所在网格中心与传感器Ri之间的欧氏距离;参数ai可表示Ri的发现概率随着距离增加而减少的速率。
设λi为传感器Ri的扫描频率,即单位时间内扫描视场与目标接触的次数,λi与Ri扫描区域范围和扫描速度大小有关,令Ai为Ri的扫描区域范围(以雷达为例,可用扫描扇区的张角表示);vi为扫描的速度(以雷达为例,可用角速度表示),则λi=vi/Ai。
假设目标通过一个网格需要一定时间Td,当目标进入Ri探测区域中的某一网格时开始计时,经时间t(t<Td)后,传感器Ri对目标的发现概率为

其中,n=[λit],[·]为取整函数。
将式(1)中的n近似地用连续的时间函数λit表示,得到

可见,传感器对目标的发现概率是随时间累积而增长的,其对应的概率分布函数为指数分布

如果目标一直存在于该网格内,则传感器Ri在该网格内发现目标的期望时间为

通常目标会以一定速度运动,在一定时间之后离开该网格。如果能降低发现目标的期望时间Ei,相当于提高了目标在该网格中被检测发现的概率。由目标通过网格的时间Td,可得Ri在该网格中检测发现到目标的概率为

2 信息共享条件下的传感器发现概率
假设组网传感器采用并行结构,为降低组网传感器的虚警概率,通常采取K/N判决规则[8],在N部传感器共同探测一个目标时,必须当其中任意K部(及K部以上)都发现目标时,才认为目标确实存在。如果各传感器探测发现目标的期望时间能够缩短,则整个传感器网络的发现期望时间也将缩短,相当于提高了一定探测时间的发现概率。
当组网传感器之间存在协同作用时,先发现目标的传感器可以将该目标的位置信息传送给其他传感器。如果传感器Ri预先获得了目标位置的正确信息再开始搜索目标,可以因此减小扫描范围[9]。考虑目标存在运动,位置指示信息也存在一定误差,假设减小之后的扫描区域范围为Ai',通常Ai'<Ai,在扫描速度vi不变的情况下,λi'=vi/Ai',λi'> λi。由式(4)可知,Ri发现目标的期望时间会减少,即Ri在得到先验信息的条件下,发现目标的平均时间缩短,相当于在一定的探测时间内提高了发现概率,即提高了探测发现的能力。
从目标进入Ri探测区域起计时,假设Ri在目标进入t1时间以后(要求t1<Td,否则目标已经进入其他区域了),接收到了其他传感器的位置指示信息。但由于提供信息的传感器受各种因素影响,提供的信息不一定可信,即位置指示信息可能是正确的,也可能是错误的。下面分别计算在位置指示信息正确和不正确情况下,传感器的发现概率。
2.1 位置指示信息正确时传感器发现概率
如果该位置指示信息正确,即目标真实存在于区域Ai'内。传感器Ri在t1时刻已发现目标的概率有,在t1之后仅扫描Ai'区域,则在任意时刻t,Ri对目标的发现概率PiT(t)为

已知 λi'> λi,令 0 < pi<1,t1≥0,令 EiT为目标真实存在于区域Ai'内时,传感器Ri发现目标的期望时间,则


2.2 位置指示信息不正确时传感器发现概率
如果其他传感器提供的位置指示信息不正确,即目标真实存在于区域Ai'外,传感器Ri在Ai'内扫描一段时间至t2后仍不能发现目标,则将扫描范围重新扩至Ai。要求t2<Td,则在任意时刻 t,Ri对目标的发现概率PiF(t)为
已知 λi'> λi,令0 <pi<1,t1≥0,t2>0,令 EiF为目标不存在于区域Ai'内时,传感器Ri发现目标的期望时间,则


当 t2=t1时,有 EiF=Ei;当 t2>t1时,EiF>Ei。
此外,当传感器Ri在Ai'内不能发现目标时,可以向提供位置指示信息的传感器反馈一个出错的报告,提示对方重新搜索确认。
2.3 传感器综合发现概率
假设位置指示信息正确的概率为PT,即目标以概率PT真实存在于区域Ai'内,以概率1-PT存在于区域Ai'外,则Ri的综合发现概率Pi'(t)为

则传感器Ri发现目标的综合期望时间Ei'为

3 传感器组网发现概率
上文给出了单传感器在单个网格中的发现概率,而计算目标在进入探测区域之后的发现概率,需要结合目标的运动轨迹。假设目标在运动中经过M个网格,按通过顺序依次编号为1,2,…,M,目标通过每个网格的时间相应记为 Td1,Td2,…,TdM。
对每一传感器Ri,分别计算其在每一区域的发现概率在独立探测条件下的计算方法为


假设目标在运动中共被N个传感器Ri(i=1,2,…,N)检测,分别计算出每个传感器的发现概率Pi后,可以用K/N规则整体判决[10]。其计算式为

式中:P为整个传感器网对特定运行轨迹目标的发现概率;D为状态空间;S表示组网传感器中发现目标的传感器集合;表示组网传感器中未发现目标的传感器集合;k为集合S中的传感器数目。且
4 仿真实验
求解传感器组网目标发现概率的关键是获得单传感器在各网格内的目标发现概率,下面以某一网格内的单传感器探测为例,讨论不同参数对信息共享条件下发现概率的影响。
取 λi=0.1,pi=0.8 进行仿真,并令 b= λi'/λi,b反映了信息共享条件下,指示的目标位置信息精确性对传感器扫描频率的改善作用。
1)位置指示信息正确时传感器发现概率。分别取b=10,改变t1,以及取t1=3,改变b来观察发现概率随时间t的变化,如图1所示。
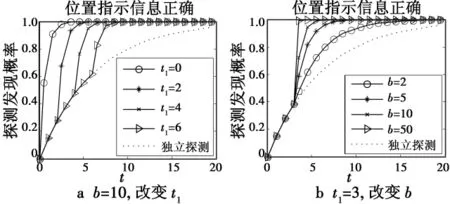
图1 位置指示信息正确时传感器发现概率对比图Fig.1 The contrast of sensor discovery probability with the right location indication information
由图1可见,自目标进入探测区域至传感器接收到位置指示信息的时间t1和共享的位置指示信息对扫描频率的改善程度b同时影响着信息共享条件下的发现概率,使之在时间点t1之后更快地增长,且时间点t1之后发现概率的增长速度由b的取值决定。b取值越大,发现概率增长越快,即信息共享条件下位置指示信息正确时,传感器越早获得位置指示信息,且指示的目标位置越精确,越有利于提高传感器发现概率随时间的增加速度。
2)位置指示信息不正确时传感器发现概率。分别取 t2-t1=2,改变 t1,以及取 t1=3,改变 t2-t1来观察发现概率随时间t的变化。如图2所示。

图2 位置指示信息不正确时传感器发现概率对比图Fig.2 The contrast of sensor discovery probability with the wrong location indication information
由图2可见,位置指示信息不正确时,信息共享条件下的发现概率永远低于独立发现概率,t1和t2-t1的取值对时间点t2之后的发现概率增长速度没有影响。因此,位置指示信息不正确时,传感器越晚获得位置指示信息,且在错误目标位置指示区域内花费的扫描时间越短,越有利于提高传感器发现概率随时间的增加速度。
3)位置指示信息正确时传感器发现期望时间。分别以t1和b为自变量,观察另一参数改变时,期望的时间变化。如图3所示。
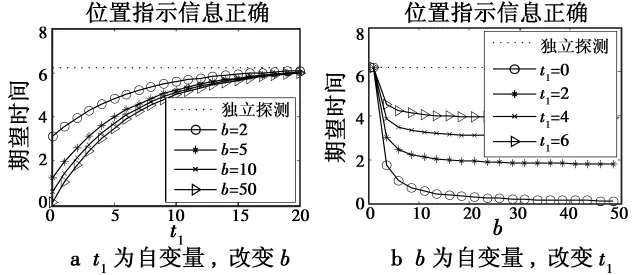
图3 位置指示信息正确时传感器发现期望时间对比图Fig.3 The contrast of sensor discovery expectation time with the right location indication information
由图3可知,信息共享条件下位置指示信息正确时,传感器发现期望时间永远小于独立探测条件下的期望时间。随着t1增加,信息共享条件下的发现期望时间也相应增加,当t1→∞时,该期望时间趋近于独立探测条件下的期望时间;随着b增加,信息共享条件下的发现期望时间降低,当b→∞时,该期望时间趋于一个特定值,该特定值是由t1取值决定的。因此,信息共享条件下位置指示信息正确时,传感器越早获得位置指示信息,且指示的目标位置越精确,越有利于降低期望时间。
4)位置指示信息不正确时传感器发现期望时间。分别以t1和t2-t1为自变量,观察另一参数改变时,期望时间的变化。如图4所示。

图4 位置指示信息不正确时传感器发现期望时间对比图Fig.4 The contrast of sensor discovery expectation time with the wrong location indication information
由图4可知,信息共享条件下位置指示信息不正确时,传感器发现目标的期望时间永远大于独立探测条件下的期望时间。随着t1增加,信息共享条件下的发现期望时间降低,当t1→∞时,该期望时间趋近于独立探测条件下的期望时间;随着t2-t1增加,信息共享条件下的发现期望时间也相应线性增加。因此,信息共享条件下位置指示信息不正确时,传感器越晚获得位置指示信息,且在错误目标位置指示区域内花费的扫描时间越短,反而越有利于降低期望时间。
5)传感器综合发现概率。取b=10,t1=3,t2-t1=2,改变PT,观察发现概率随时间t的变化,如图5所示。

图5 传感器综合发现概率对比图Fig.5 The contrast of sensor integration discovery probability
由图5可见,随着位置指示信息正确概率PT的增加,在时间点t1之后,综合发现概率以不同的速度增长。可以推测:当位置指示信息正确概率的取值小于某一阈值δ1时,综合发现概率将永远低于独立探测发现概率,如图中PT=0.05的曲线所示;当位置指示信息正确概率的取值超过某一阈值δ2时,综合发现概率将永远高于独立探测发现概率,如图中PT=0.5和PT=0.9的曲线所示;当位置指示信息正确概率的取值介于δ1和δ2之间时,综合发现概率在一定时间内将高于独立探测发现概率,之后一直低于独立探测发现概率,如图中PT=0.25的曲线所示。
6)传感器综合发现期望时间。在b、t1、t2-t1三个参数中,分别固定其中两个,观察第3个参数改变时,观察发现期望时间随位置指示信息正确概率PT的变化。如图6所示。
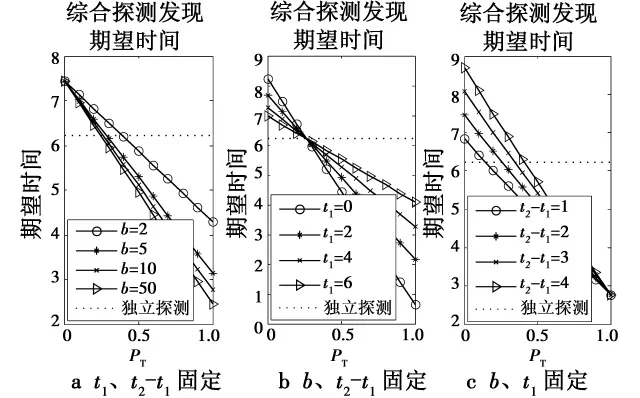
图6 传感器综合发现期望时间对比图Fig.6 The contrast of sensor integration expectation time
由图6可见,随着位置指示信息正确概率PT增加,能够降低综合发现期望时间。当固定b、t1和t2-t1中的任意两个参数,改变第3个参数时,信息共享条件下的发现期望时间曲线随PT呈线性变化,期望时间最大值出现在PT=0处,最小值出现在PT=1处,且当PT大于某一值时,信息共享条件下的期望时间将低于独立探测条件下的期望时间,表明随着位置指示信息正确概率增大,传感器发现目标的期望时间也随之降低。其中,图6a取t1=3,t2-t1=2,改变 b的取值,信息共享条件下的发现期望时间最大值不变;图6b取bi=10,t2-t1=2,改变t1的取值,信息共享条件下的发现期望时间曲线与独立探测条件下的期望时间曲线交于同一点;图6c取 bi=10,t1=3,改变 t2-t1的取值,信息共享条件下的发现期望时间最小值不变。由此得到结论:传感器获得位置指示信息的时间和其在位置指示区域内花费的时间,共同决定了综合发现期望时间的最大值;目标位置信息的精确性和传感器获得位置指示信息的时间,共同决定了综合发现期望时间的最小值;目标位置信息的精确性和传感器在位置指示区域内花费的时间,共同决定了使信息共享条件下综合发现期望时间等于独立探测条件下期望时间的对应PT值。
当位置指示信息正确概率较低时,信息共享对传感器综合发现概率和传感器综合发现期望时间的影响都是负面的。为降低位置指示信息正确概率较低时信息共享的不利影响,可以改变协同规则:当传感器接收到位置指示信息时,先根据提供信息的传感器可信度判断该信息正确的概率,如果正确概率低于一定值,该传感器将不改变扫描区域,继续在原定区域内搜索目标。在此期间,传感器可能会接收到来自其他传感器的位置指示信息,此时可综合前面接收到的信息,再进行信息正确概率的判断,直到接收的位置指示信息正确概率达到一定阈值,才开始改变扫描区域大小。
5 结论
战场组网传感器之间通过信息共享,能够提高目标发现概率,降低目标发现的期望时间。本文重点研究了目标位置指示信息共享条件下,单传感器的目标发现概率和传感器网络的目标发现概率求解方法。通过仿真,分析了不同参数的取值对目标发现概率和发现期望时间的影响,对传感器组网方式和协同机制设计有一定的参考价值。研究结果也可用于单传感器和传感器组网的作战效能评估。
[1] 杨志强,谢虹.基于信息原理的雷达网抗干扰性能评估[J].系统工程与电子技术,2004,26(1):34-35,39.
[2] CHONG C Y,KUMAR S P.Sensor networks:Evolution,opportunities,and challenges[C]//Proceedings of the IEEE,2003,91(8):1247-1256.
[3] IYENGAR S S,BOOKS R R.分布式传感器网络(上)[M].夏立,江汉红,译.北京:电子工业出版社,2010.
[4] 李修和,冷锋.复杂电磁环境下组网雷达的作战效能建模[J].军事运筹与系统工程,2006,20(4):20-24.
[5] 汪新刚,谢晓方,李雪.基于搜索论的反舰导弹捕捉概率研究[J].指挥控制与仿真,2011,33(1):34-38.
[6] 刘军伟,沙基昌,陈超.搜索论研究综述[J].舰船电子工程,2010,5:10-14,58.
[7] DHILLEN S S,CHAKRABARTY K.Sensor placement for effective coverage and surveillance in distributed sensor networks[C]//Proceedings of IEEE Wireless Communications and Networking Conference,2003:1609-1614.
[8] 朱彬,胡玮,邓科,等.多波段光学探测系统的探测概率研究[J].电子科技大学学报,2008,37(3):339-342.
[9] PERRY W,BUTTON R W,BRACKEN J,et al.Measures of effectiveness for the information-age navy:The effects of network-centric operations on combat outcomes[R].Santa Monica Calif.:RAND Corp,MR-1449-Navy,2002.
[10] 杨大志,丁建江,谢超.基于分布式检测的组网探测概率建模与仿真[J].现代雷达,2008,30(12):24-27.
猜你喜欢
中学生数理化·七年级数学人教版(2022年10期)2022-11-11 03:18:56
中学生数理化·中考版(2022年6期)2022-06-05 06:49:10
中学生数理化·中考版(2021年6期)2021-11-22 07:52:30
数学小灵通(1-2年级)(2021年10期)2021-11-05 07:20:44
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
数学小灵通(1-2年级)(2020年12期)2021-01-14 00:57:50
数学年刊A辑(中文版)(2019年3期)2019-10-08 07:34:40
北京航空航天大学学报(2017年6期)2017-11-23 05:57:36
小学阅读指南·低年级版(2016年10期)2016-09-10 07:22:44