提高脉冲激光近炸引信定距精度的研究
2012-08-27 08:16:08赵忠伟张玉钧倪家正
电光与控制 2012年12期
赵忠伟, 张玉钧, 周 权, 沈 超, 倪家正
(脉冲功率激光技术国家重点实验室(电子工程学院),合肥 230037)
0 引言
提高炸点控制精度是引信特别是近炸引信发展的一个永恒主题,而提高炸点控制精度关键在于对目标的精确定距和起爆点位置的精确控制,激光引信能精确控制起爆点的位置[1-2],所以对激光引信实现较高的距离判别精度有着重要意义。
目前,由于激光引信对体积、重量和功耗有着苛刻的要求,所以激光引信主要采用脉冲测距的方法进行距离判别[3-4]。根据脉冲激光测距的原理可知,影响测距的因素主要有起止脉冲信号时刻的判别和时间间隔的测量。国内外目前在脉冲激光引信中,主要采用缩短发射激光的脉冲宽度来提高引信的测距精度[5-6],虽然这种方案能提高引信测距精度,但对于发射机和接收机的带宽却提出了更高的要求,引信功耗也随之加大,因此,本文设计了可在原有发射机和接收机的条件下提高脉冲激光引信测距精度的时刻判别和时间间隔测量电路。
1 时刻判别电路设计
时刻鉴别单元的主要作用是对放大电路的输出信号进行实时监测,为系统产生起始信号和结束信号,其性能直接影响着测时精度和系统的距离分辨率。目前常用的方法有前沿时刻鉴别、恒定比值时刻鉴别法和高通容阻法[7]。前沿时刻鉴别容易实现,但是漂移误差较大,无法满足高精度测量的应用;恒定比值时刻鉴别能够克服前沿时刻鉴别的缺点,减小漂移误差,提高测量精度,但是其需要得到一个精确到纳秒量级的延迟,这是很难实现的,系统的复杂度也会增加:所以本文在高通容阻的原理上设计了有源CR双阈过零时刻判别电路。其原理如图1所示。
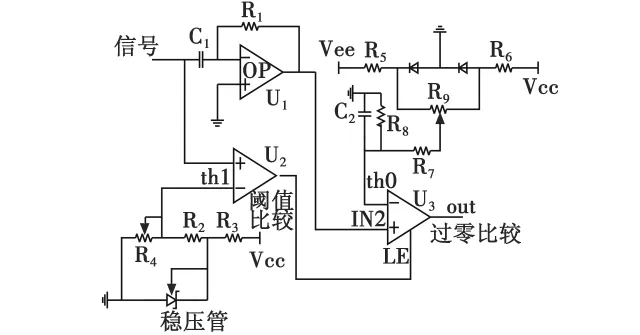
图1 有源CR双阈过零时刻判别原理图Fig.1 The active CR double threshold zero-crossing timing discriminating circuit
由图1可知,放大后的信号分为两路,一路经过C1、R1和放大器U1构成的有源CR微分电路,由单极性脉冲信号变为双极性信号,输出到过零比较器U3;另一路输入到阈值比较器U2进行阈值比较,只有当信号大于阈值时,才确定信号有效,输出高电平到U3的使能端口LE,使U3处于比较状态,避免了因噪声和干扰信号引起过零比较器的误触发。当U3处于比较状态时,双极性信号经过U3,与零阈值进行比较,输出所需的脉冲信号。整个电路的时序如图2所示。
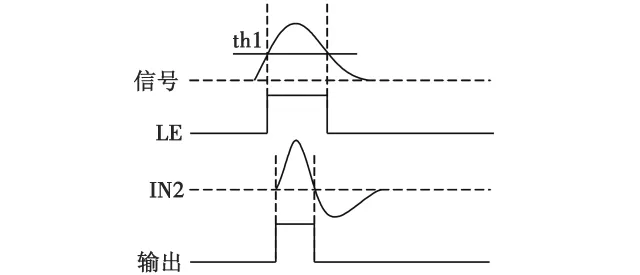
图2 时刻判别电路时序图Fig.2 The time sequence of discriminating circuit
为了减小误差,避免电源电压波动或者噪声等造成的比较器阈值电平飘移,在比较器U2中采用稳压管稳定阈值th1,电位器R4用来调整阈值大小;在U3中采用两只二极管串联来稳定零电平,并且为了得到稳定的阈电压,对电位器R9输出的电压进行了衰减和滤波,减少了噪声和外部干扰的影响。
2 时间间隔测量原理
脉冲激光引信测距的工作原理是通过测定脉冲光波在测线上往返所经历的时间,按照式(1)求出距离值,即脉冲飞行时间法[8]。

式中:D为被测距离;c为光速;t为脉冲光波在测线上往返经历的时间间隔,即飞行时间。在激光引信中,测距的时序如图3所示。
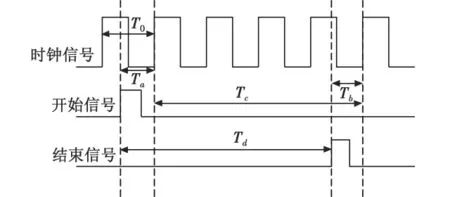
图3 脉冲激光引信测距的时序图Fig.3 Time sequence diagram of pulse laser fuze ranging
从图3中可以看出,由开始信号到结束信号的真实时间间隔为Td,而若采用简单的直接计数法得到的测量结果为Tc,存在极大的误差。目前,脉冲测距时间测量方法有模拟法[9]、数字法和数字插入法。数字插入法是在数字法的基础上,通过插入法提高测量精度,包括延迟线插入法、时幅转换插入法和时间放大插入法。数字插入法继承了数字法测量范围大和线性好的优点,又实现了高精度的时间测量,因此,为了精确测量开始信号和回波信号的时间间隔,本文选择具有结构简单、测量重复频率高、易于单片集成和精度高等优点的FPGA延迟线插入法进行高精度时间间隔的测量。
在本设计中,时间间隔的测量包括“粗”时间测量和“细”时间测量两部分,其主要结构如图4所示。
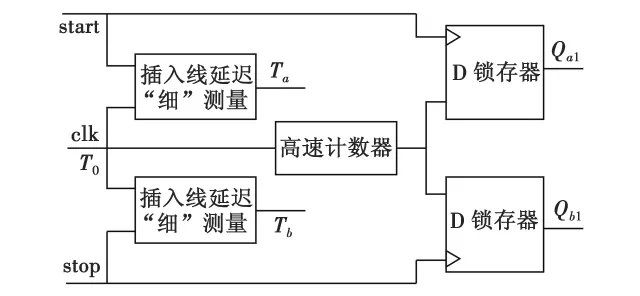
图4 时间间隔测量的主要结构Fig.4 Main architecture of time-interval measurement
“粗”时间测量,就是直接计数法,通过一个高速计数器和两个锁存器来实现,以时钟周期为基准,开始信号和回波信号为计数开门和关门的锁存信号,锁存住激光开始信号start和回波信号stop到达时的计数值,根据计数器的时钟周期T0算出“粗”时间Tc;两路延迟线构成“细”时间测量电路,用来测量开始或回波信号与时钟上升沿之间的时间间隔Ta和Tb,最后得到开始和回波信号之间的时间间隔Td。

假设计数器和两个锁存器位宽为N,开始信号的锁存器Qa锁存的计数值为Qa1,回波信号的锁存器Qb锁存的计数值为Qb1,则开始信号和回波信号之间的计数间隔Q△可表示为

假设延迟线每个单元的延时时间为Tr,主波信号延迟线和回波信号延迟线编码器的输出分别为Na、Nb,计算可得Ta和Tb。

由式(2)~式(4)可得Td为

由以上分析可知,在计数时钟稳定的条件下,FPGA延迟线插入法测量时间间隔的精度取决于延迟单元的精度Tr。
3 时间间隔测量电路设计
3.1 延迟线插入法
在FPGA中实现延迟线插入法有很多种,本文利用FPGA内部专用进位链来实现时间内插,以便得到较高的测时分辨率[10-11]。使用加法器将进位单元级联起来形成一条对输入信号的时间内插延迟线,实现时间内插电路,进位链构成延迟线的示意如图5所示,其中,A为被加数、B为加数,Sum为和,C为进位数,S为回波信号。
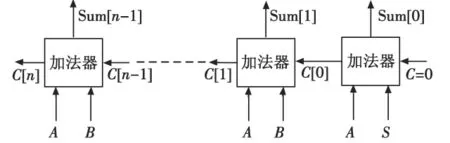
图5 进位链构成延迟线示意图Fig.5 Schematic diagram of delay-line formed by carry-in chain
设置所有的A为1,B除最低位外都为0,加数的最低位作为开始或回波信号S的输入。这样,当外部没有输入信号时,S为0,所有输出Sum都为1,进位链上没有信号传播;当外部有输入信号时,S为1,加法器的最低位加法公式就是A+S+C=1+1+0,和数Sum[0]为0,进位信号为1。这样,输入信号沿着进位链的每级专用进位连线一级级地传输,输入信号被延迟线延迟的信息可以通过加法器的输出信号显示出来。
3.2 电路设计
通过对大量FPGA芯片性能的研究,本文选用Xilinx公司的XC2V250-6CS144I器件来实现 Td的精确测量。该器件内部最高时钟可达420 MHz,延迟进位链延时单元延时时间为82 ps,可以实现高速计数、高时间分辨率、响应速度快的TDC电路,其电路功能框图如图6所示。
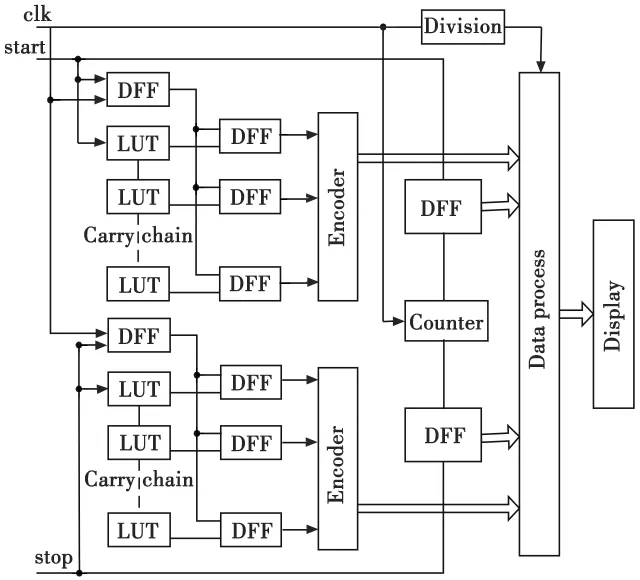
图6 FPGA实现时间间隔测量电路功能框图Fig.6 Graph of time-interval measurement circuit in FPGA
由图6可知,时间间隔测量电路主要包括高速计数器、延迟进位链、锁存器、D触发器和编码器。其中:高速计数器采用400 MHz的时钟计数进行“粗”测量,测得Tc;延迟进位链包括开始信号start和回波信号stop两路延迟线路,而且要求每一路延迟线路总的延迟时间大于高速计数器的时钟周期2.5 ns,所以每一路延迟线路的延迟单元不少于31个,为了确保延迟电路的有效性,每一路延迟线路的延迟单元设为48个;锁存器采用400 MHz时钟同步的开始信号和回波信号进行锁存;D触发器,用来完全一致地锁存输入信号沿进位链传输的时间延迟信息;编码器是将延迟进位链的48位二进制码转换为十进制码。最后,各路信息汇总到信号处理单元,计算出测量的距离,再输出到显示器进行显示。
4 实验结果及分析
根据以上提高测距精度的方法,设计了一套脉冲激光引信系统,如图7所示,包括发射系统(半导体激光器驱动电路,半导体激光器和发射透镜),接收系统(接收透镜,探测器,前放电路,主放电路和时刻鉴别电路),时间测量电路和数据处理4个部分。

图7 脉冲激光引信系统框图Fig.7 Graph of pulse laser fuze structure
系统中半导体激光器选用PGAS1S12,采用温度补偿激光二极管控制器X9530构成的驱动电路,接收电路中选用三极管BFR92构成双极晶体管型的跨阻式前置放大电路,主放大器AD8047构成增益控制电路,时刻判别电路中选用运放AD8047组成有源CR电路,高速比较器AD96687用来双阈比较和时刻判定,FPGA进行时间间隔测量和最后的信号处理。
完成以上系统后,进行实验测量,由于信号经过接收系统各器件会产生延迟,所以需要对系统进行校正,校正后进行实验,目标放于距离系统的3~10 m之间,每个位置测量5次,得到数据如表1所示。

表1 近距离测量结果Table 1 Measure results in small range
从表1可以看出,单次测量最大误差小于0.170 m,多次测量平均误差小于0.040 m,结果表明,通过多次求平均后可以减小随机误差的影响。从结果中也可以看出,系统产生的误差不仅仅来自于时间间隔测量电路中延迟单元Tr,还有时钟晶振的抖动导致的“粗”计数部分出现的误差,以及时刻判别电路中高速比较器存在的传输延时分散性误差。因此造成单次测量结果误差偏大,但平均误差很小,证明了本系统满足设计需要,所设计的时刻鉴别电路和时间间隔测量电路提高了脉冲激光引信的定距精度。
5 结论
根据高通容阻的原理和脉冲激光引信的特点,设计了双阈过零时刻判别电路和基于FPGA延迟线插入法的时间间隔测量电路,满足了在不增加脉冲激光引信系统功耗、体积和重量的前提下,有效地提高了系统定距的精度。实践表明,该电路应用于脉冲激光近炸引信测距系统中可实现0.17 m的定距精度,满足实际需要。
[1] 崔占忠,宋世和.近炸引信原理[M].北京:北京理工大学出版社,2009:1-6.
[2] 李大社,刘淑娥,刘晶.激光自适应引信的设计[J].电光与控制,2006,13(2):69-72.
[3] 冯国旭,常保成.高精度激光测距技术研究[J].激光与红外,2007,37(11):9-12.
[4] 施坤林,黄峥,马宝华,等.国外引信技术发展趋势分析与加速发展我国引信技术的必要性[J].探测与控制学报,2005,27(3):1-5.
[5] FARDI B,SCHEUNERT U,CRAMER H,et al.Multi-modal detection and parameter-based tracking of road borders with a laser scanner[C]//IEEE,2003:95-99.
[6] 桑会平,邓甲昊,胡秀娟.脉冲激光引信微弱回波信号数字检测技术研究[J].兵工学报,2007,28(4):420-424.
[7] 陈千颂,杨成伟,潘志文,等.激光飞行时间测距关键技术进展[J].激光与红外,2002,32(1):7-10.
[8] JIN K C,MOON M K.TDC module for time-of-flight[C]//IEEE Nuclear Science Symposium Conference Record,Honolulu,HI,Oct.26-Nov.3,2007:761-764.
[9] 潘继飞,姜秋喜,毕大平.模拟内插法及其测量误差分析[J].电光与控制,2007,14(1):147-151.
[10] ALOISIO A,BRANCHINI P,CICALESE R,et al.FPGA implementation of a high-resolution time-to-digital converter[C]//IEEE Nuclear Science Symposium Conference Record,Honolulu,HI,Oct.26-Nov.3,2007:504-507.
[11] SONG Jian,AN Qi.A high-resolution time-to-digital converter implemented in field programmable gate arrays[J].IEEE Transactions on Nuclear Science(S0018-9499),2006,53(1):236-237.
猜你喜欢
环球人物(2022年4期)2022-02-22 22:05:06
小资CHIC!ELEGANCE(2021年32期)2021-09-18 06:17:14
数学小灵通(1-2年级)(2020年11期)2020-12-28 00:41:14
电子技术与软件工程(2020年7期)2020-02-05 02:19:22
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:44
舰船电子对抗(2016年5期)2016-12-13 08:23:52
爆笑show(2015年4期)2015-06-24 01:55:12
读写算·小学低年级(2014年4期)2014-07-24 22:42:55
小学阅读指南·高年级版(2014年2期)2014-05-27 05:29:32
网络安全与数据管理(2013年6期)2013-08-16 01:07:56