反潜直升机舰艇编队尾后截击潜艇建模
2012-08-27 08:15:50罗木生姜青山侯学隆
电光与控制 2012年12期
罗木生, 姜青山, 侯学隆
(海军航空工程学院,a.研究生管理大队; b.指挥系,山东 烟台 264001)
0 引言
在水面舰艇编队反潜作战过程中,潜艇的威胁日益严峻,尤其是面对静音性能优良、航速较高的核动力潜艇时,这类潜艇不仅能采用诸如阵地伏击等战术,也可能采用尾后追击战术。因而,有必要研究对抗此类潜艇的反潜战术——尾后拦截潜艇。
舰艇编队反潜作战的研究丰富[1-5],外军航母编队反潜作战也有相关研究[6-8]。关于拦截尾后追击的敌潜艇战术,国内主要针对水面舰艇使用拖曳线列阵声纳反潜。然而,在保护编队中高价值单元的反潜作战过程中,水面舰艇兵力有限、任务繁多,极有可能出现兵力不足[6]的情况,此时,尾后截击潜艇可由舰载反潜直升机担任。本文在分析敌潜艇尾后鱼雷攻击阵位的基础上,对舰载反潜直升机尾后截击潜艇进行建模分析。
1 水面舰艇编队尾后截击潜艇
尾后截击潜艇是对抗潜艇尾后追击法而采用的一种反潜战术。尾后追击法是潜艇有远距离探测能力或在有可靠的侦察引导保障条件下,在水面舰艇编队尾后,以一定航速实施追赶、跟踪和攻击的一种战斗方法。
水面舰艇编队在通过敌潜艇可能活动区时,一般采取反潜曲折机动航行,平均航速20 kn(1 kn=1.852 km/h)左右[7]。常规动力潜艇水下最大航速虽然能达20 kn左右,如日本的“苍龙”级AIP常规潜艇[9],但若以此速度航行,噪声很大,且难以长时间维持此速度航行,因此一般不运用此战术。而先进的核动力攻击潜艇的水下最高航速超过30 kn,如美国“弗吉尼亚”级核动力攻击潜艇水下最高航速34 kn[10],它们能以较高航速、较低噪音追击水面舰艇编队,并发起攻击。
潜艇攻击武器主要是潜射反舰导弹和鱼雷,前者射程较远,后者射程较近。如美国核动力攻击潜艇装备的“战斧”反舰型导弹最大射程249 n mile(1 n mile=1852 m)、“鱼叉”反舰导弹最大航程70 n mile;而其装备的MK48增强型(ADCAP)线导鱼雷,其航程/航速(km/kn)为 38/55 或 50/40[11],若取 80% 为鱼雷有效射距,则可在16.4 n mile或21.6 n mile左右对水面舰艇编队发起攻击。
本文主要建模分析防御潜艇使用鱼雷进行攻击的尾后截击潜艇问题。反潜直升机搜索水下目标的器材主要有吊放声纳、声纳浮标、磁探仪等。声纳浮标探测距离较远,能长时间持续搜索,不会出现搜索空隙,较其他方式更适合尾后截击潜艇。
2 潜艇尾后鱼雷攻击阵位分析
尾追潜艇为发起有效的鱼雷攻击,须由追击阵位转入鱼雷攻击阵位,然后发射鱼雷。因此,为建立有效的反潜区域,从潜艇追击阵位、鱼雷攻击阵位两方面进行分析。
2.1 潜艇追击阵位
为实施有效的鱼雷攻击,敌潜艇将以一定速度追击水面舰艇编队,在不被发现的前提下,尽可能缩短与水面舰艇编队的距离。而一旦决定实施鱼雷攻击,敌潜艇则将从尾后追击阵位,进入鱼雷攻击阵位。
现假设潜艇企图在水面舰艇编队正后方D0距离处E点发起鱼雷攻击,如图1所示,则潜艇应进入一定阵位扇面内(图中阴影区),否则无法实施既定攻击企图。
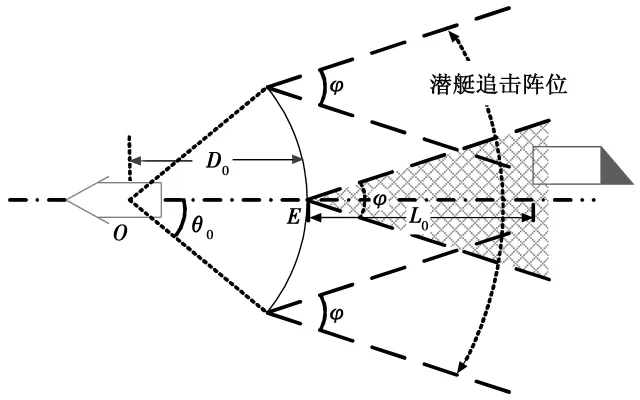
图1 潜艇追击阵位示意图Fig.1 Submarine chasing position
设水面舰艇编队直线航行,平均航速VS;潜艇平均追击速度为VQ,为保持或缩短与舰艇编队的距离,VQ≥VS,则扇面角φ应满足

若从追击阵位进入鱼雷攻击阵位的时间不超过TQf,则潜艇至鱼雷发射点的距离应满足

潜艇若位于图1所示的追击阵位内,则可从水面舰艇编队尾后2θ0扇面内发起鱼雷攻击,因此,尾后拦截反潜区域应覆盖图1所示的潜艇追击阵位。
2.2 鱼雷攻击阵位
自发射后,鱼雷应在航程内与目标相遇,否则无法命中,因而,对于不同位置、不同航速的目标,鱼雷的最大发射距离则不同。因此,需解算不同攻击舷角下,鱼雷的最大发射距离,从而得出鱼雷攻击阵位。
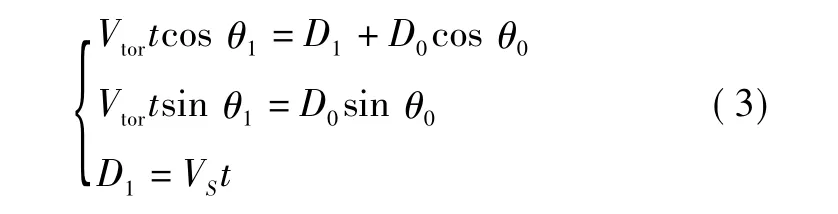
设水面舰艇编队以平均速度VS直线航行,鱼雷航程Rtor,发射时与水面舰艇编队的距离为 D0、位于B点,平均航速为Vtor,朝着相遇点运动,于A点与攻击目标相遇,水平方向的空间位置关系如图2所示。
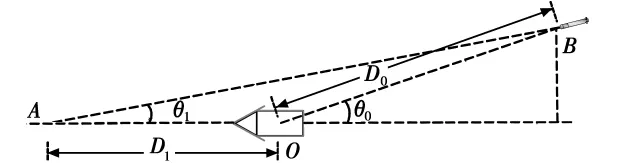
图2 鱼雷攻击阵位示意图Fig.2 Torpedo attacking position
由几何关系得
且由鱼雷最大航程限制,取80%为鱼雷有效射距,有

根据式(3)、式(4)可解算出鱼雷发射阵位,即不同θ0下的最大发射距离D0,max。只有在该距离之内发射鱼雷,才有可能命中目标。
若取鱼雷平均航速45 kn、航程50 km,水面舰艇编队平均航速20 kn,解算结果如图3所示,其中,鱼雷要攻击的目标位于原点。图中,实线为鱼雷攻击的最大发射距离,若敌潜艇于实线右侧发射鱼雷,则不论在哪个位置,都会由于超出鱼雷最大航程而无法命中目标。

图3 鱼雷攻击阵位仿真结果Fig.3 Simulation result of submarine chasing position
3 反潜直升机尾后截击潜艇建模
为有效拦截给定任务区域内可能的尾追潜艇,首先需确定拦截阵的长度。拦截阵过长,则耗费过多的反潜资源;过短,则很可能出现漏网之“鱼”。除此之外,拦截阵的阵位、有效工作时间等参数,也是影响拦截效能的重要因素。
3.1 编队尾后截击区域
水面舰艇编队尾后可能出现潜艇的区域,都可能成为截击潜艇的区域,如图4所示(图中阴影区),其中θ0∈[0,90]。但是,从前文潜艇追击及其鱼雷攻击阵位的分析中可知,敌追击潜艇出现在编队尾后较小扇面区域的概率很高,因为在此区域内,敌潜艇被发现的概率较低,且有利于其提高鱼雷命中概率。所以,为提高反潜效能,实际作战中,尾后截击区域不宜过大,具体大小应根据当前敌我态势、海区环境等因素确定。

图4 尾后截击潜艇区域示意图Fig.4 The area for stern interception submarine
3.2 尾后拦截阵长度建模
反潜直升机垂直舰艇编队航线布设直线型拦截阵,设其长度为Ls,以防御尾后扇面角2θ0的扇形区域内可能出现的敌尾追潜艇。
设拦截阵建立完毕时与舰艇编队的距离为d1,拦截阵到达有效工作时间时与舰艇编队的距离为d2,拦截阵刚好覆盖潜艇追击阵位时与舰艇编队的距离为di,如图4所示。那么,为了防止潜艇从未覆盖的拦截区域进入鱼雷攻击阵位,须满足

为了对指定扇面实施尾后拦截,则拦截阵长度应满足以下两点。
1) 若 di≤D0cos θ0,则

2) 若 di> D0cos θ0,则

当给定d2时,由式(5)~式(7)可得出指定扇面角时的最短拦截阵长度。d2取值应限定在防空兵力掩护空域,且不宜过大,否则直升机将耗费过多的留空时间用于航渡;若有可能,应大于敌潜艇被动声纳探测距离,使得敌潜艇不能持续探测、跟踪水面舰艇编队。
3.3 拦截阵阵位
为有效发挥拦截阵的反潜效能,建立拦截阵的阵位非常重要。其影响因素较多,现主要分析以下3方面。
1)拦截阵开始工作时不能离舰艇编队太近,否则会干扰拦截阵,如编队航行噪声会干扰水声探测器材,探测器材的有效探测距离Rsensor,取值为

2)拦截阵开始工作时,应位于舰艇编队与可能的鱼雷攻潜阵位之间,才能至少对鱼雷攻击阵位探测一次,因而有

3)若由单架反潜直升机建立拦截阵,并在拦截阵位上探测,设反潜直升机留空时间为Thel,则有

式中:Tfly为直升机航渡时间,近似为(d1+d2)/Vhel;Vhel为直升机航渡时的飞行速度;Tset为建立拦截阵的时间,若布设声纳浮标拦截阵,则近似为拦截阵长度与投放声纳浮标飞行速度之比;Twork为拦截阵的有效工作时间。
3.4 拦截阵有效工作时间
随着与水面舰艇编队距离的不断增加,拦截阵在指定扇面内所能覆盖的有效拦截区域越来越小,导致敌潜艇从未覆盖的区域进入攻击阵位的概率增加。因此,当拦截阵与舰艇编队的距离达到d2时,当前拦截阵停止工作,而应在舰艇编队尾后建立新的拦截阵。

3.5 声纳浮标拦截阵的建立
建立声纳浮标拦截阵实现对尾追潜艇的探测一般分为两个步骤:1)投布声纳浮标;2)监听声纳浮标阵。实施过程中需确定声纳浮标阵的布设长度、投布方法、监听飞行方法等参数。
声纳浮标阵的布设长度为拦截阵的长度。若拦截阵长度较短时,可由单架反潜直升机布设;若拦截阵较长,或任务紧急,可采用多机布设声纳浮标。多机投布浮标阵的方法有“同向布放法”、“反向布放法”和“接力法”等[12]。
监听声纳浮标阵飞行方法主要有:平行浮标段和垂直浮标段。浮标阵长度和反潜直升机与浮标的通信距离是选择监听飞行方法的主要因素,但无论采用哪种方法,都应避免因频繁转向而导致飞行人员疲劳,最佳长度为30 ~40 km[12]。
为确保持续对尾后截击区域进行探测,设布设声纳浮标拦截阵需要时间为Tset,则在当前拦截阵停止工作前Tset时开始布设新的拦截阵;那么,新拦截阵布设完毕时,刚好接替到达有效工作时间的拦截阵,开始探测。所以,从距舰艇编队d1时开始工作,至距舰艇编队d2时停止工作,则拦截阵的有效工作时间为
4 仿真分析
想定:为防御尾后追击潜艇的鱼雷攻击,由反潜直升机在水面舰艇编队正后方建立声纳浮标拦截阵。设编队平均航速为20 kn,反潜直升机平均航速为180 kn/h,留空时间为3 h;敌潜艇可能使用的鱼雷平均航速为45 kn、航程为50 km。
若假定当拦截阵与舰艇编队的距离达50 n mile时,停止监听声纳浮标,即d2=50 n mile,则对于不同航速的尾追敌潜艇,需建立拦截阵的最短长度如图5所示。
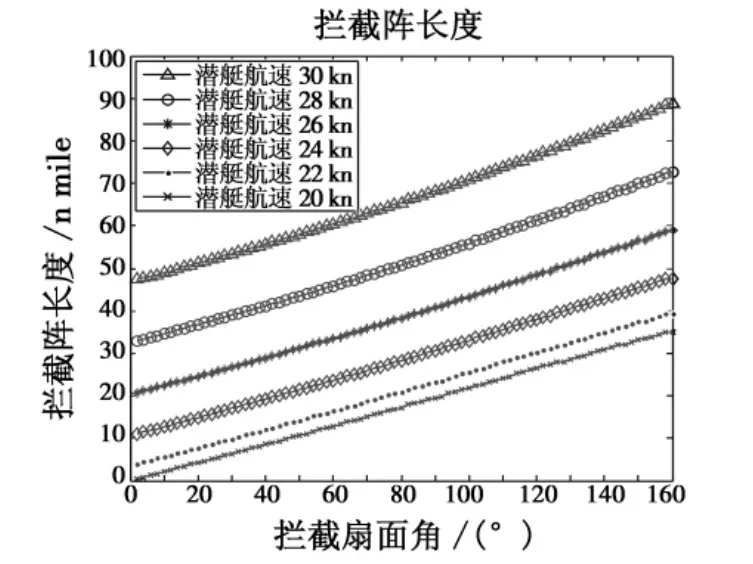
图5 潜艇不同航速时的最短拦截阵长度(d2=50 n mile)Fig.5 The shortest barrier length for different velocity of submarine(d2=50 n mile)
由图5可得,拦截相同的扇形区域,拦截阵最短长度的增幅大于敌潜艇航速的增幅,即敌潜艇航速的增加将使拦截阵的最短长度大幅增加。
若根据经验推测,敌潜艇为实现较低噪音、较高航速尾追,其平均航速可能为25 kn,那么敌潜艇尾追阵位扇面半角φ/2=36.87°。此时,对于不同失效距离d2,不同拦截扇面所需建立的最短拦截阵长度如图6所示。由图6可得,拦截相同的扇形区域,随着d2的增加,拦截阵最短长度也在增加,但增幅不大。若指挥员根据当前战场敌我态势,得出舰艇编队正后方60°的扇形区域存在敌潜艇的威胁最大,即θ0=30°,因而决定建立声纳浮标拦截阵,最大限度地消除该威胁,那么,由单机完成拦截任务,不同失效距离d2,所需建立拦截阵的最短长度、d1、有效工作时间如表1所示。
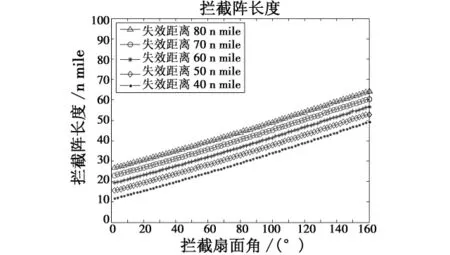
图6 不同失效距离d2时的最短拦截阵长度(潜艇航速25 kn)Fig.6 The shortest barrier length for different d2with submarine velocity of 25 kn
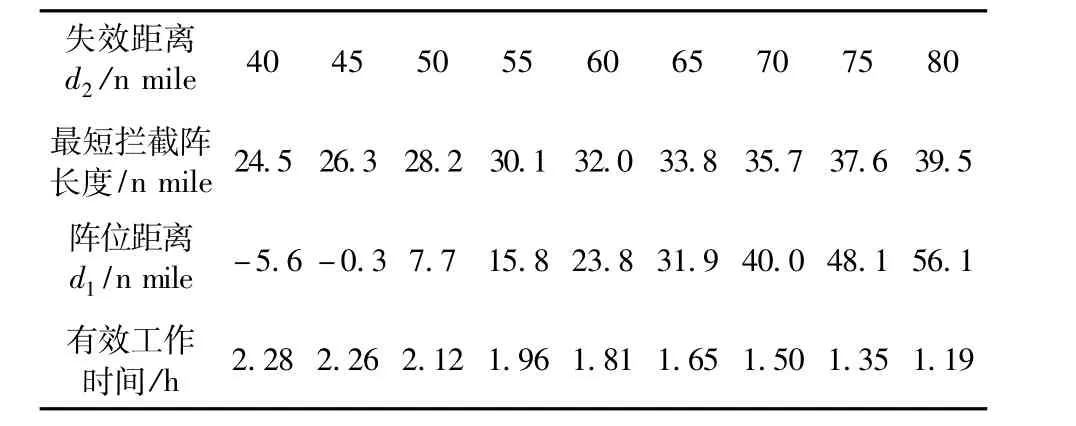
表1 不同d2时的最短拦截阵长度(拦截尾后60°扇面)Table 1 The shortest barrier length for different d2(stern interception of a 60°sector)
当d1为负值时,可根据式(8)取d1=Rsensor,然而这将导致直升机有效工作时间缩短,即不能充分使用直升机的留空时间。
随着失效距离d2的增加,为有效防御敌潜艇,拦截阵最短长度越来越大;且由于反潜直升机留空时间有限及d2的增加,使得阵位距离d1也增加,导致拦截阵的有效工作时间减少。在当前任务扇面内,敌鱼雷攻击的最大发射距离D0=12.8 n mile。为满足式(9),d2不能超过 52.1 n mile。
综合上述因素,单机反潜直升机为完成当前拦截任务,可垂直水面舰艇编队航向布设28.2 n mile的声纳浮标拦截阵,从d1=7.7 n mile开始工作,至d2=50 n mile,当前拦截阵失效,需在舰艇编队尾后建立新的拦截阵。拦截阵有效工作时间约为2.12 h。
5 结束语
潜艇技术的发展,尤其是高航速、低噪声的先进核动力潜艇的服役,使得潜艇尾后追击水面舰艇编队并发起鱼雷攻击成为可能。所以,水面舰艇编队尾后截击潜艇将成为一项重要的反潜作战任务。
本文以核潜艇采用尾后追击战术为研究背景,在分析其追击阵位和鱼雷攻击阵位的基础上,建立了反潜直升机尾后拦截阵长度、拦截阵设置阵位及其有效工作时间的计算模型。最后通过想定,对尾后截击潜艇模型进行了仿真分析。所建立的相关模型可为舰艇编队指挥员制定和实施尾后截击潜艇作战提供决策依据。
[1] 纪洪涛,王保峰,姚印诗.登陆编队航渡中对潜防御队形配置探讨[J].潜艇学术研究,2004,22(4):20-21.
[2] 丁松林,杜源.编队对潜防御及效能评估[J].指挥控制与仿真,2005,27(5):49-51.
[3] 沈晓军,张慧慧,李开生.海战场舰艇反潜作战的优化配置研究[J].指挥控制与仿真,2007,29(6):44-46.
[4] 林福冬,杜一平.舰艇编队对潜搜索效能分析[J].火力与指挥控制,2008,33(2):104-106.
[5] 董志荣.水面舰艇立体反潜系统构想[J].电光与控制,2008,15(5):12-15.
[6] 孙茂军,纪金耀.美国海军航空母舰突击群反潜作战能力分析[J].潜艇学术研究,2002,20(4):78-80.
[7] 纪金耀.美航空母舰突击群反潜作战[J].潜艇学术研究,2001,19(5):76-81.
[8] 太禄东,刘曦霞,韩庆伟.航母水下防御研究[J].舰船电子工程,2008(8):14-17.
[9] 王伟生.“苍龙”号——日本潜艇技术新进展[J].当代海军,2009(4):52-55.
[10] 汪玉,姚耀中.世界海军潜艇[M].北京:国防工业出版社,2006:130.
[11] MK-48 Torpedo[DB/OL].(2011-09-14)[1998 -12-12].http://www.fas.org/man/dod-101/sys/ship/weaps/mk-48.htm.
[12] 孙明太.航空反潜战术[M].北京:军事科学出版社,2003:72-75.
猜你喜欢
军事文摘(2023年1期)2023-02-03 05:05:26
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:42
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
小哥白尼(趣味科学)(2019年6期)2019-10-10 01:01:38
小学科学(学生版)(2019年6期)2019-07-10 00:52:16
电子测试(2018年14期)2018-09-26 06:04:12
中国军转民(2018年1期)2018-06-08 05:53:23
兵器知识(2017年10期)2017-10-19 19:34:33
军事运筹与系统工程(2017年1期)2017-07-31 18:19:00