脱粒滚筒角速度的模糊PID控制①
2012-08-21 01:27:34黄金侠潘成华李凤霞
佳木斯大学学报(自然科学版) 2012年6期
黄金侠, 潘成华, 李凤霞, 张 良
(1.佳木斯大学信息电子技术学院,黑龙江佳木斯154007;2.多多药业有限公司,黑龙江佳木斯154007)
0 引言
随着农民对收获机收获质量要求的不断提高,在收获机上应用于新型的自动控制技术已经成为农业机械实现自动化和智能化发展的必然趋势.对于脱粒性能一定的谷物联合收获机,为保证脱粒质量,其脱粒滚筒的角速度应控制在预期的范围内[1].然而,脱粒滚筒系统具有滞后性、时变性和非线性等环节,收获机在田间作业时,作物的一些参数(作物湿度、作物密度)也难以确定,所以脱粒滚筒是时变的复杂系统.采用传统的控制算法得不到非常满意的控制品质,因此研究采用模糊PID控制算法实现了对脱粒滚筒角速度的自动控制.
1 模糊自整定PID控制原理
模糊自整定PID控制器是利用模糊控制规则和推理对PID控制的比例增益、积分增益和微分增益三个参数进行在线调整,控制原理如图1所示.调整原则是:当偏差e或偏差变化率ec较大时,应减小Kl和KD,使系统有较好的快速性,同时增大KP,避免出现较大的超调;当偏差e或偏差变化率ec较小时,应增大KP和Kl,使系统具有良好的稳态性能,同时减小KD,避免出现震荡.将调整后的比例、积分和微分量代人公式(1)中计算,计算结果u(k)即为控制器的最终输出[2].

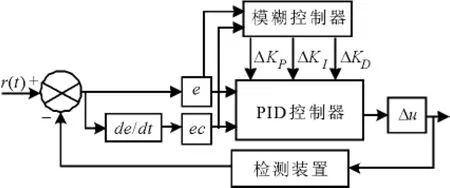
图1 模糊自整定PID控制原理
2 模糊PID控制器设计
收获过程中,要求联合收获机在保证脱粒质量的前提下,提高收获效率.从文献[3]滚筒模型中可知,当收获机的结构和运动参数确定后,机器前进速度和作物密度是影响滚筒角速度的主要因素.其中,作物密度是不可控制且时刻变化.当作物密度突然发生变化时会引起脱粒滚筒角速度的改变,可以通过控制机器行走速度来实现脱粒滚筒角速度的稳定运行.根据模糊控制器的特点及脱粒滚筒控制系统中输入量的特性,本文将脱粒滚筒角速度的偏差e及偏差变化率ec作为模糊自整定PID控制器的输入,PID控制器比例、积分和微分的变化量作为模糊控制器的输出,机组的行走速度增量Δv作为模糊自整定PID控制器的输出量[2].本设计依据被控系统的实际情况和工程实际经验,将偏差e和偏差变化率ec对应到(-2,2)的论域,将输出量 ΔKP,ΔKl,ΔKD分别对应到 (- 0.3,0.3)、(-0.3,0.3)、(- 0.5,0.5)的区间.对应的模糊语言词集表示为{负大、负中、负小、零、正小、正中、正大},用{NB,NM,NS,ZO,PS,PM,PB}七组符合来表示.
本系统采用gauss隶属函数,并在论域区间两个端点处,分别采用S型和Z型的隶属函数.通过多次操作经验总结和理论分析,结合“if A and B then C”规则可以归纳出输入变量e与三个参数ΔKP,ΔKl,ΔKD间的定性关系,结合工程技术人员的分析和实际操作经验,考虑偏差ec变化的影响,综合得出ΔKP,ΔKl和ΔKD模糊控制规则,如表1所示.ΔKP,ΔKl,ΔKD对应e,ec的曲面关系见图2 所示.
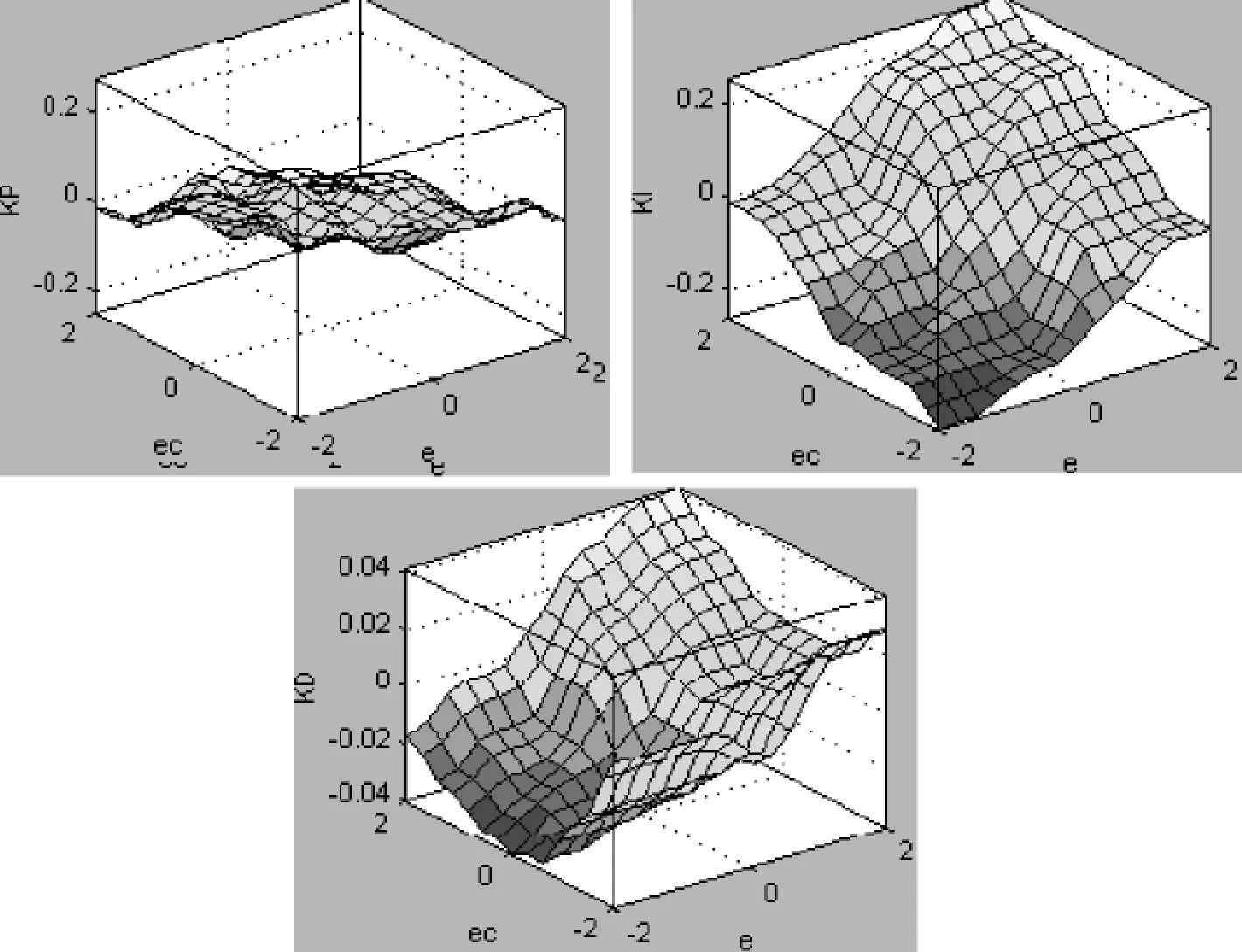
图2 ΔKP,ΔKI和 ΔKD对应e,ec的曲面关系图
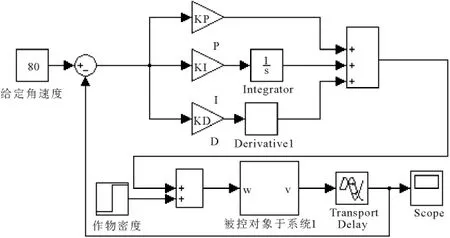
图3 PID控制Simulink仿真框图
3 基于SIMULINK软件仿真及分析
3.1 被控对象近似传递函数的确定
[4]可知,被控系统的传递函数可以近似地表示成

式中:K为增益系数;T1,T2为时间常数;τ为滞后时间.
根据文献[4],参数整定采用下列公式:
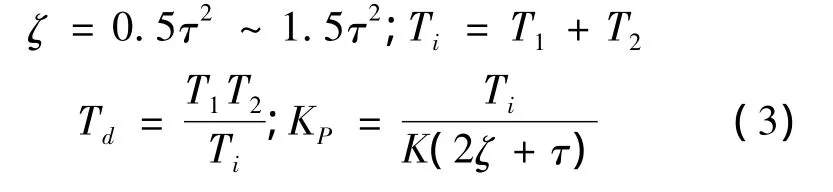
式中,KP,Ti,Td为PID控制器的比例、积分和微分时间常数.其中ζ>0,为中间参数,具有时间的量纲.
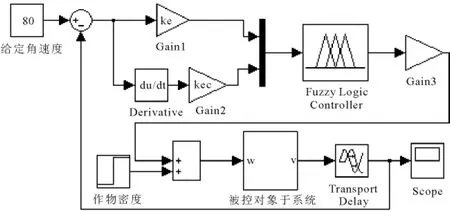
图4 模糊控制Simulink仿真框图
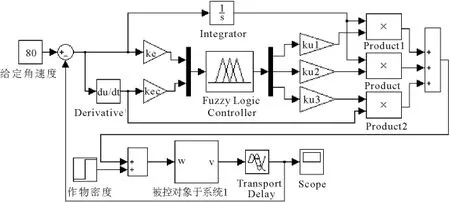
图5 模糊自整定PID控制Simulink仿真框图
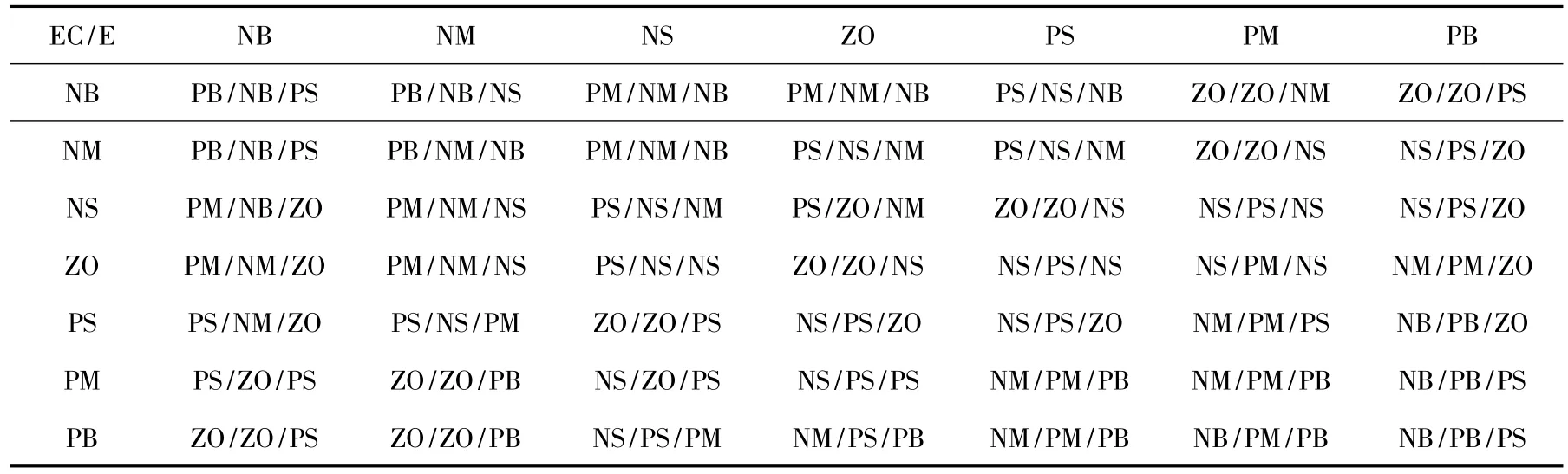
表1 ΔKP,ΔKl和 ΔKD的模糊规则
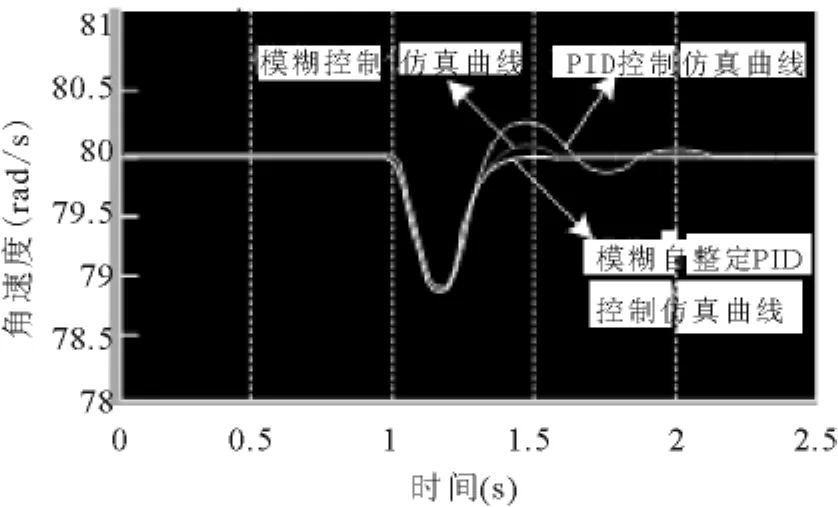
图6 PID、模糊及模糊自整定PID控制曲线图
3.2 控制系统的仿真及分析
Matlab/Simulink是用来对连续、离散和混杂系统的建模、仿真和分析的优秀集成软件.本文通过此软件建立三种控制方法(模糊控制、PID控制、模糊PID控制)应用于脱粒滚筒角速度控制中的仿真模型,如图3~5所示.其中,数学模型由前边公式(2)给出.
表2给出了滚筒仿真参数.本设计给出了脱粒滚筒在初始状态下的角速度为80rad/s,收获机作业速度 1.4m/s、农作物的密度为 2.6kg/m2.当滚筒角速度处于稳定状态1秒时,作物密度从原来的2.6kg/m2突然增加到3.25kg/m2(即密度增大了25%)时,仿真曲线见图6所示.
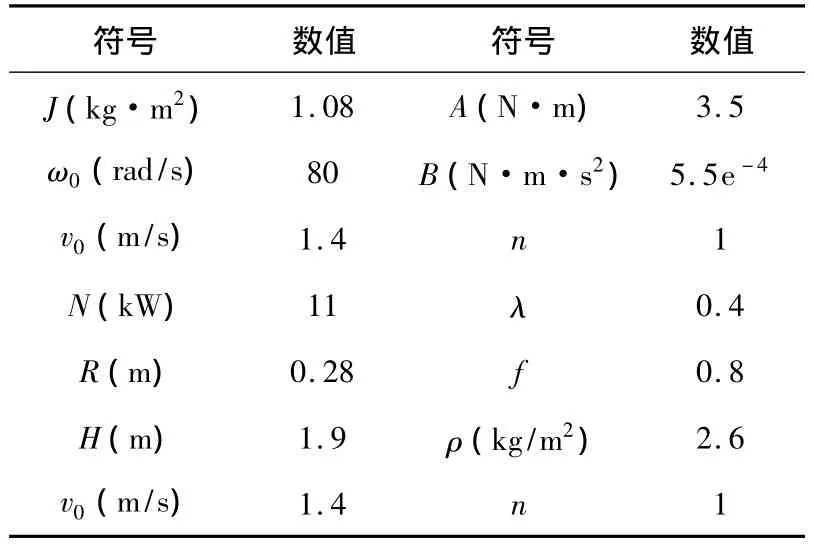
表2 仿真参数
通过上图可得出如下结论,如表3所示.
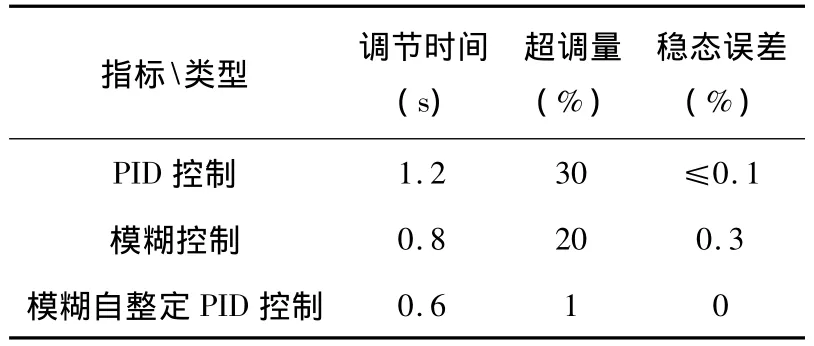
表3 仿真结果比较
由以上的仿真结果可知,模糊自整定PID算法弥补了PID控制的超调量高和模糊控制的稳态精度差等问题,把模糊自整定PID控制算法应用到本控制系统是可行的.
4 结论
模糊自整定PID控制具有良好的鲁棒性和较强的适应性.此控制系统经过田间实际应用也达到了预期的控制目标.
参考文献:
[1]张认成,桑正中侠.轴流脱粒滚筒模糊控制仿真[J].农业机械学报,2001,2(32):46 -48.
[2]黄金侠,李凤霞等.模糊自整定PID在工业温度控制系统中的应用于研究[J].长沙通信职业技术学院学报,2011,12(15):154-156.
[3]倪军,毛罕平等.脱粒滚筒自调整模糊控制及VLSI实现技术[J].农业工程学报,2010,30(4):134-135.
[4]李国栋,李勇智等,联合收割机脱粒滚筒的PID恒速控制[J].农业机械学报,2000,31(1):134-135.
猜你喜欢
农业工程学报(2022年12期)2022-09-09 03:02:16
装备制造技术(2021年5期)2021-08-14 01:44:22
农业技术与装备(2020年11期)2020-12-17 12:43:47
农业机械学报(2018年9期)2018-09-17 06:49:26
农机化研究(2017年2期)2017-12-16 07:01:30
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
新农业(2016年13期)2016-08-16 12:12:42
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:52
火控雷达技术(2016年1期)2016-02-06 02:18:01
时代农机(2015年3期)2015-11-14 01:15:21