基于Fuzzy Logic与State flow的汽车换挡策略研究
2012-08-21 07:22:02王秀发田晋跃
车辆与动力技术 2012年2期
王秀发,于 英,田晋跃
(江苏大学汽车与交通工程学院,镇江 212013)
汽车变速器因其具有良好的驾驶性能,行驶安全性能和乘坐舒适性能而受到人们的欢迎,装车率不断提高,但基于传统控制理论与技术的自动变速器在一些特殊运行工况下,其工作性能还有诸多不尽如人意的地方,如换挡频繁,经济性能差等.因此开发具有模拟实践经验丰富的驾驶员驾驶技术的智能控制方式成为今后变速器技术发展的重要方向.文中采用模糊控制作为换挡规律研究的主要控制方法.文献 [1]中考虑到行驶路面状况对车辆的换挡有着重要的影响,提出了在线修正换挡规律的控制策略.文献 [2]基于模糊理论,建立了由基本模糊换挡策略和模糊修正模块所组成的模糊换挡控制策略.文献 [3]提出了以加速度为控制参量的包含升、降档模糊控制器的汽车模糊控制换挡策略的研究.
综合以上文献中提出的模糊换挡控制方法可知,换挡控制在智能控制中主要采用单模糊控制器或者是以一个主控制器和一个修正控制器或者是以两个主控制器组成.故文中在已有的模糊控制的基础上设计了以两个主控制器、基于State flow的档位判决模块和模糊修正模块组成的控制方法.
1 换挡控制策略
文中换挡控制系统由3个模块组成,分别是升降挡模糊控制器模块、State flow换挡决策模块和模糊修正模块.其中,升降挡控制器模块由升档控制器和降档控制器组成.如下图1所示.换挡系统是以车速ν、油门开度信号α二参数的升、降档换挡规律为依据,并根据坡道条件、弯道道路条件和制动力信号,并利用经验丰富驾驶员总结出的换挡规则进行模糊推理.在这里环境模糊融合模块输出是比例因子Kμ,且Kμ对升、降档控制器的输出进行调整,可得到gU和gD(gU对应升档控制器的输出档位;gD对应降档控制器的输出档位),再在State flow档位判决模块中由输入gU、gD和加速度a进行逻辑判断,可最终得到输出档位.
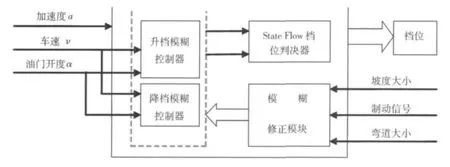
图1 Fuzzy logic与State flow换挡策略原理图
1.1 State flow的逻辑规则
升降挡控制器模块是将换挡规律曲线分解为升档规律曲线和降档规律曲线,相应的对曲线进行模糊化,生成语言变量,再根据得到的曲线设计控制器的控制规则,就可以得到升降挡控制器了.控制器的作用与否是由汽车的加速度来决定的,当加速度为正时系统由升、档控制器控制,当加速度为负时系统由降档控制器控制.在换挡规律曲线中存在着换挡延迟的现象,它的主要作用是:①换入新档,不会因油门的振动或车速引起的轻度变化,而重新换回原来的档位,保证换挡过程的稳定性;②有利于减少换挡循环,防止控制系统元件的加速磨损,并防止乘坐舒适性的降低.所以在两个主控制模块输出档位时,需要与原来档位进行关系的比较,由于需要很好的逻辑能力,故在文中引入了State flow工具箱,就是因为它具有很好的关系推理能力.State flow逻辑规则如下:
(1)升挡控制器.若控制器输出的档位大于当前系统的档位时,系统升挡.否则档位不变.
(2)降挡控制器.若控制器输出的档位小于当前系统的档位时,系统降挡.否则,档位不变.
1.2 车辆换挡的主要原则
车辆进行模糊换挡的前提是控制系统应具有熟练驾驶员的驾驶经验.驾驶员的操纵意图主要通过油门踏板和转向盘来反映,换挡的基本原则是获得最佳的动力性和经济性能.通过对驾驶员的操纵经验的总结,得到车辆在各种工况下运行时模糊换挡的主要原则:①平直道路上行驶时优先采用平直道路换挡规律;②在复杂工况下,为达到车辆行驶时具有足够的动力,这时应采用最佳动力性换挡规律;③如果没有制动信号参与,为减少频繁换挡次数,在每个档位的停留时间应大于一个设定值;若小于设定值,除非是动力不足,否则禁止换挡.④车辆行驶在上坡的路况时,若坡度过大致使车辆行驶过程中动力不足则降挡,同时为了防止连续坡道的频繁换挡,应增大抵挡的使用范围.⑤车辆行驶在下坡的路况时,坡道坡度不大、道路状况良好,则不应换挡;若坡道坡度过大,道路状况不好,有制动信号,则应降挡;⑥如果轻踏制动踏板,不应该马上降挡,而是要考虑其他的路面信号;若重踏制动踏板,则应马上降挡;⑦如果车辆行驶的道路弯道角度大时,则不应降挡;如果弯道角度小,则应降挡.并且要尽量的避免在坡道上转弯,在遇到大弯时应尽可能低速转大弯,在原地转小弯时应避免使用高档行驶.
2 升降挡模糊换挡控制模块
模块采用双输入单输出,选取车速和油门开度作为输入量,换挡位置为输出量.
考虑到轿车在良好路面上的行驶速度在100 km/h左右,所以,可设论域Xν[0,100]为速度的变化范围,对该论域进行量程转化,取Kν=1/10,论域转化为Xν[0,10].由论域的取值范围,选择车速ν的词集为 “VS”、“LS”、“S”、“M”、“B”、“LB”、“VB”7个词集.取论域中的各输入模糊变量的隶属度函数为高斯型隶属函数,下同.
设论域Xα[0,100]为油门开度的变化范围,对该论域进行量程转化,取Kα=1/10,那么论域可以转化为Xα[0,10].选择油门开度的词集为“VS”、“LS”、“S”、“M”、“B”、“LB”、“VB”7个词集.
随后根据熟练驾驶员的操作经验和专家知识与换挡规律曲线的数值,参照模糊换挡的主要原则可以归纳出两个主控制器的换挡规则.由于篇幅限制,这里作者省略三维关系图.
3 State Flow档位判决模块
State flow可以应用于复杂控制和监督逻辑等方面的设计.在模块中,输入是加速度a和升、降档控制器的两个输出档位gU与gD(gU对应于升档控制器的输出档位;gD对应降档控控制器的输出档位),输出是g.图2是档位状态根据State flow逻辑规则进行转换的State flow图,可以清晰看到档位状态在一定条件下的流动路径.

图2 换挡决断过程的State flow图
4 模糊修正模块
模块是三输入单输出的模糊推理模型,输入包括坡度大小、制动大小、转弯大小,经模糊化后转化成语言变量,再根据模糊规则判断,最后通过解模糊器,得到输出,即比例因子Kμ[4].
由于在道路行驶中坡度大于45°是很少出现的,所以定义模糊输入变量坡度的论域为 [0,45],取Kg=1/9,则论域转化为 [0,10].模糊集为:小坡度 (L);中等坡度 (M);大坡度(B).模糊输入变量制动力的论域为 [0,200],这里取Kb=1/20,则论域转化为 [0,10].模糊集为:轻踩油门 (L);中等程度踩油门 (M);重踩油门 (H).模糊输入变量的转弯角度的论域为[0,90],取Ke=1/10,则论域转化为 [0,10].模糊集为:小角度 (L);中等角度 (M);大角度 (B).
定义模糊输出变量的论域为 [0,8],输出变量是环境模糊融合模块对环境的模糊输入变量判别出来的具有代表路面行驶状况的参数,即比例因子Kμ.模糊集为:好行驶路况 (G);较好行驶路况 (LG);较差行驶路况 (LW);坏行驶路况(W).
输入采用高斯型隶属函数,输出采用三角形隶属函数,并根据熟练驾驶员的操作和模糊换挡的原则可得到如表1所示的模糊规则库.

表1 环境模糊融合模块规则表
5 仿真结果和分析
将上述模糊换挡策略应用于仿真模型 (由于篇幅的限制,不再叙述具体的仿真模型).其中变速器5个档位的转动比为Ⅰ档3.883,Ⅱ档2.764,Ⅲ档1.967,Ⅳ档1.4,Ⅴ档1.整车质量为1 550 kg,车轮半径为0.37 m.且设置地面阻尼系数为0.21.
图3中 (a)、(b)、(c)对应于无环境模糊融合模块的升档控制器、降档控制器和最终输出的档位图.图4是有环境模糊融合模块的对应档位输出图.

图4 带有环境融合控制器的输出档位
由图3的 (a)、(b)和图4的 (a)、(b)可知升降挡控制器再单独作用时出现了不同程度的换挡循环.所以,可以看出由升、降档两个控制器的共同作为为基本模块具有很好的优越性.由图3的(c)和图4的 (c)可以看出,在路况不是很好的情况下,可以使汽车有足够的动力来进行有效的行驶.即有效的提高了车辆的效率和防止意外换挡,有利于车辆行驶的安全性和稳定性.
6 结论
针对车辆行驶在复杂道路上时,所出现的频繁换挡和在差的行驶路况时动力不足等状况,提出了以S升降挡控制器为基本模块,利用包括坡度、制动力、转弯大小等3个因素为输入的模糊修正模块的换挡策略.通过仿真分析验证了这种模糊换挡策略的有效性.
[1] 申水文,葛安林.模糊换挡技术与综合换挡规律[J].农业工程学报,1997,13(3):145-149.
[2] 冯能莲,李克强,连小珉.液力机械传动车辆模糊换挡车辆研究 [J].农业机械学报,2003,34(5):9-12.
[3] 巫世晶,朱恩涌,李群立,等.汽车模糊控制换挡策略仿真研究 [J].西南交通大学学报,2008,43(6):756-761.
[4] 张曾科.模糊数学在自动化技术中的应用 [M].北京:清华大学出版社,1997.
猜你喜欢
中国交通信息化(2023年1期)2023-03-18 02:01:58
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
测控技术(2018年10期)2018-11-25 09:35:52
智富时代(2018年9期)2018-10-19 18:51:44
传媒评论(2018年11期)2018-02-16 07:32:00
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电源技术(2016年2期)2016-02-27 09:04:56
中国交通信息化(2015年3期)2015-06-05 03:53:32
河南科技(2015年2期)2015-02-27 14:20:29
中国交通信息化(2014年7期)2014-06-05 03:18:25