基于二阶锥规划的平面阵近场等旁瓣波束优化
2012-08-21 01:32:32王华奎王二庆
舰船科学技术 2012年10期
王华奎,王二庆
(1.水声对抗技术重点实验室,广东 湛江 524022;2.91388部队,广东 湛江 524022)
0 引言
矩形平面阵的远场和近场波束图均可以表示成2条相互垂直的线列阵波束图乘积的形式[1]。因此对平面阵的进行加权可以简化为计算2条相互垂直的线列阵的加权值,再用向量直积的方式来计算平面阵的加权向量。对于近场目标而言,由于目标距离阵列的距离不再是等差数列,因此在计算这2条相互垂直的线列阵的加权值时,常规的ChebyShev等方法将不再适用。本文提出使用二阶锥规划(Second order cone programming,SOCP)方法来计算这2条线列阵的近场加权值[2],再通过向量直积来计算矩形平面阵的加权值,成功得到了平面阵在近场下的等旁瓣波束图。
1 平面阵波束图
如图1所示,该平面阵为矩形阵,阵元个数为N×M=NM,其中沿x轴和y轴的阵元个数分别为N和M,阵元间距均为λ/2,其中λ为窄带信号中心频率对应的波长。
设平面阵的近场扫描点到坐标原点的距离为Rp,其俯仰角和方位角分别为θp和φp。则第p个扫描点的坐标为

图1 三维坐标系和平面阵Fig.1 Three-dimensional coordinate system and planar array

第(n,m)个阵元的坐标为

其中,n=1,2,…,N;m=1,2,…,M。
该扫描点到第(n,m)个阵元的时延可表示为2个坐标之差所得向量的二范数:

根据式(3),平面阵的阵列流形可写为

若平面阵的近场聚焦点到坐标原点的距离为R0,对应的角度分别为θ0和φ0,则该聚焦点到第(n,m)个阵元的时延可表示为

其中 x0=R0[sinθ0cosφ0,sinθ0sinφ0,cosθ0]T为聚焦点坐标。由式(5)可知,对应的加权向量为

式中:e表示向量点积;

为幅度加权;

为相位加权。
平面阵的近场波束图可表示为

近场情况下,由于矩形阵的波束图可以表示为2个相互垂直的线列阵的波束图乘积,即式(9)可以重新写为

其中:Bx(Rp,θp,φp;R0,θ0,φ0)和 By(Rp,θp,φp;R0,θ0,φ0)分别为沿x轴和y轴的均匀线列阵的近场波束图,其表达式分别为

式中⊗为向量直积。
根据式(10)~式(15),对1个矩形平面阵的波束形成可以分解为对2个线列阵进行波束形成。先计算出2个线列阵的加权向量,再通过向量直积就可以得到该平面阵的加权向量。
2 二阶锥规划下的平面阵近场波束图
由于阵列工作在近场,因此一般用于远场的等旁瓣加权方法如Chebyshev加权方法将不再适用。为了获得等旁瓣的波束图,本文使用二阶锥规划方法(Second order cone programming)。
SeDuMi[2]是由Sturm开发,用来处理对称锥优化问题的MATLAB工具箱。该工具箱可以用来求解二阶锥和线性约束下的凸优化问题。将其用于处理波束优化问题,可以达到寻优方法规范、精确性高的目的,并且具有计算量小和计算精确等优点。对于优化问题无解的情况也能自动判别,以便修正参数继续计算。
文中的等旁瓣问题可以转化为SeDuMi中的最低旁瓣约束问题。该问题可以描述为:保证主瓣波束与期望波束的误差小于某值,计算出一组加权值,使得波束旁瓣最低[3]。

式中,B(θs)为旁瓣区域的波束;Bd(θm)和 B(θm)分别为期望主瓣和设计主瓣的波束;ΘML为主瓣区域。
3 波束图仿真
仿真中,矩形阵位于xoy平面,几何中心坐标为(0,0,0)m,其沿x轴和y轴的间距均为1 kHz声波对应的波长的一半。阵元个数为12×12=144,其中N=12,M=12。近场聚焦点的俯仰角和方位角分别为(θp,φp)=(0°,0°),该点坐标为(0,0,10)m。矩形阵及聚焦点的关系如图2所示,近场中使用Chebyshev和SOCP法获得的波束图如图3所示 (旁瓣级控制为-30 dB)。
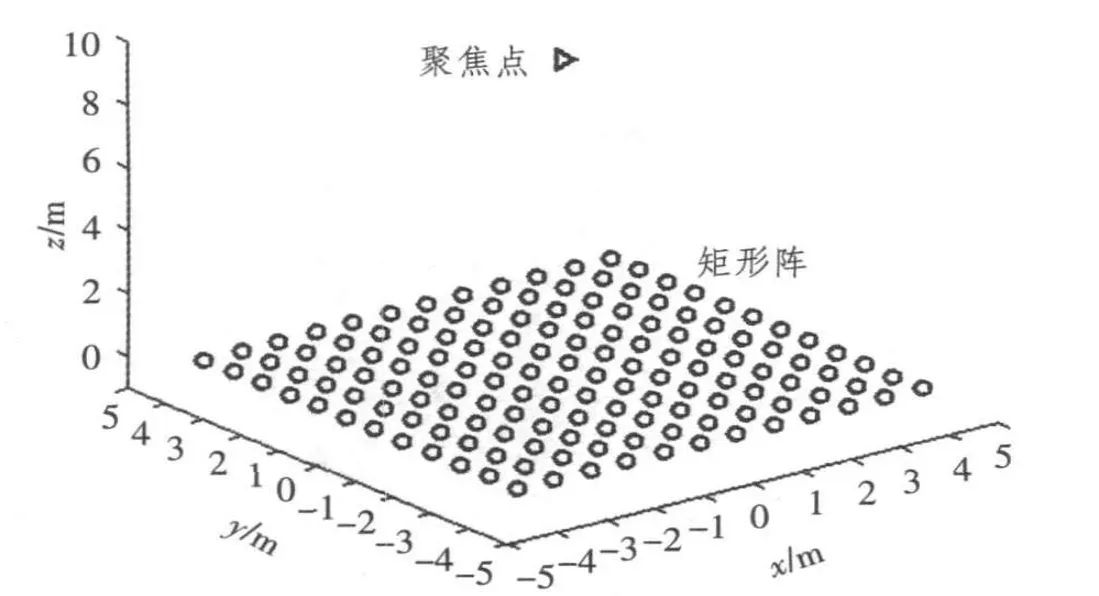
图2 矩形平面阵以及聚焦点示意图Fig.2 Sketch map of rectangular planar array and focal point
由图3(c)和图3(d)可知,在近场下,常规的Chebyshev方法获得的波束图第一旁瓣较高,并没有获得等旁瓣的效果。而SOCP方法可以获得近场下的等旁瓣波束图。图3中,ux=sin(θp)cos(φp),uy=sin(θp)sin(θφp)。
为了考虑更实际的情况,设定矩形阵的阵元位置具有随机误差。该随机值服从均值为0,方差为1/15的高斯分布。分别利用Chebyshev加权和SOCP法来进行波束优化,所得结果如图4所示。
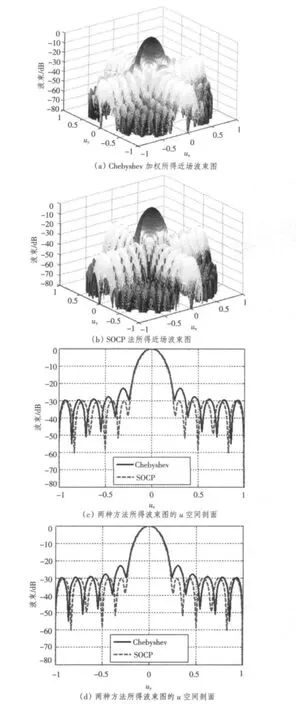
图3 近场下,分别使用Chebyshev和SOCP两种方法所得波束图Fig.3 Beam scheme in near field with Chebyshev and SOCP method respectively

图4 阵元位置存在随机误差时,分别使用Chebyshev和SOCP两种方法所得矩形平面阵的近场波束图Fig.4 Beam scheme in near field for rectangular planar array with Chebyshev and SOCP method respectively when there are random errors of array element position
由图4可知,当阵元位置存在误差时,利用Chebyshev获得的波束图的旁瓣太高,有的甚至超过了-20 dB。利用SOCP法获得的波束图,其旁瓣有轻微的抬高 (约为-28 dB),但是波束图仍保持等旁瓣特性,其结果是可以接受的。
4 结语
本文研究了近场情况下矩形平面阵的波束优化。将矩形阵的波束图等效为2个相互垂直的线列阵的波束图乘积,通过计算这2个线列阵的加权并通过向量直积的形式来获得矩形阵的加权值。仿真结果表明,近场情况下,常规的Chebyshev方法已无法获得等旁瓣波束图,而SOCP法可以获得等旁瓣波束图。当阵元位置存在误差时,常规Chebyshev法的波束图发生严重畸变,而SOCP法获得的波束图,除了旁瓣级略微抬升2 dB外,其仍然是等旁瓣波束图。这些说明近场情况下,SOCP法比Chebyshev法更稳健。
[1]VAN TREES H L.Optimum array processing:part 4 of detection,estimation,and modulation theory[M].Hoboken:John Wiley& Sons Inc.,2002.
[2]STURM J F.Using SeDuMi l.02,a MATLAB toolbox for optimization over symmetric cones[J].Optim.Meth.Softw.,1999,11(12):625 -653
[3]鄢社锋,马远良.基于二阶锥规划的任意传感器阵列时域恒定束宽波束形成[J].声学学报,2005;30(4):309-316.
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12 03:00:48
探索科学(学术版)(2019年5期)2019-07-13 03:08:23
下一代英才(酷炫少年)(2019年3期)2019-03-25 02:34:12
下一代英才(酷炫少年)(2018年12期)2018-12-29 11:26:18
下一代英才(酷炫少年)(2018年10期)2018-11-23 01:05:32
电光与控制(2018年11期)2018-11-21 03:38:22
中国测试(2018年10期)2018-11-17 01:58:50
船舶经济贸易(2018年7期)2018-08-02 07:24:24
下一代英才(酷炫少年)(2018年4期)2018-04-28 08:29:43
电光与控制(2018年4期)2018-04-19 01:19:59