国外援潜救生装备系统发展现状
2012-08-21 01:32:36孟晓宇
舰船科学技术 2012年10期
孟晓宇,田 琬
(武汉第二船舶设计研究所,湖北 武汉 430064)
0 引言
随着世界各国潜艇数量的增加,潜艇巡航过程中出现事故的几率也在提高,特别是俄罗斯海军第二代战略核潜艇“库尔斯克”号的失事,更引起了各国对援潜救生的普遍重视。潜艇因故障不能上浮导致艇员被困水下的事故是各国潜艇舰队面临的一个共同风险。因此,援潜救生是确保潜艇具有战斗力的一个非常重要的方面,历来受到世界各潜艇国家的高度重视[1]。
为避免发生类似的重大人员伤亡事故,近几十年来,各国都在致力发展和改进潜艇逃生救援方法,来提高潜艇逃生与救援能力。潜艇水下救援方式主要分为以下3种类型:
1)逃生。从逃生深度上逃离潜艇。这需要使用逃生服和呼吸系统,在上升到水面的过程中为艇员提供空气。可细分为单人逃生和集体逃生。
2)救援。在水下一定深度,利用潜艇救援系统逃离潜艇。这种方式的关键是实现救援系统与失事潜艇逃生舱的对接。
3)弃艇。逃离水面状态的潜艇。这可以通过救生筏系统来实现。救生筏系统还可以为被救艇员提供安全港,直到水面救援船抵达。
目前,以美国为代表的绝大多数具有潜艇救援能力的国家采用的救援策略,都是以救援系统作为主要救援方式,只在个别情况下采用逃生方式。
1 各国援潜救生装备系统
1.1 美国
美国海军现役的潜艇救援装备系统有:用于救援的潜艇救援潜水再加压系统(Submarine Rescue Diving and Recompression System,SRDRS),用于集体逃生的漂浮救生舱(Surface Rescue Container,SRC),用于单人逃生的潜艇逃生与浸没救援设备(Submarine Escape Immersion Equipment,SEIE)。其中,SRDRS系统为目前美国海军采用的主要救援方式[2]。
2008年9月30日,SRDRS(如图1)正式代替了之前的“神秘”号深潜救援艇(Deep Submergence Rescue Vehicle,DSRV),成为美国海军的深潜救援系统。SRDRS是美国21世纪的潜艇救援系统,代表着潜艇救援系统最先进的技术水平。SRDRS是一套能够通过空运、陆运以及安装在军舰或者商船上快速部署到世界任何地方的系统,能在72 h内与遇险潜艇对接。相比以前的救援系统,它能以更少的费用提供更强的救援能力[3]。

图1 潜艇救援潜水与再加压系统Fig.1 Submarine rescue diving recompression system
1) 系统组成[4]
SRDRS由评估/水下作业系统(Assessment/Underwater Work System,AUWS)、水面减压系统(Submarine Decompression System,SDS)、加压救援模块系统(Pressurized Rescue Module System,PRMS)和任务保障装备(PRMS Mission Support Equipment,PRMS-MSE)组成。水面减压系统、加压救援模块系统、任务保障装备系统组成重约183 t的潜艇救援系统,安装在保障母船上。潜艇救援系统的救援能力系统包括加压救援模块系统和任务保障装备。SRDRS各系统组件构成如图2所示。
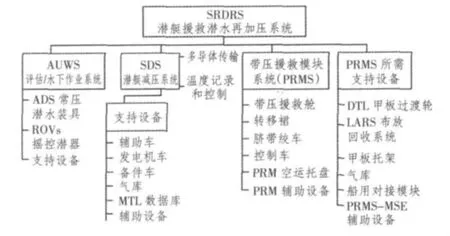
图2 SRDRS组件Fig.2 Systemic framework of SRDRS
2) 技术参数[3]
设计深度:2000 FSW;
最大工作海况:4级;
最大海流速度:2.5 kn;
失事潜艇最大角度:45°;
失事潜艇最大内部压力:5个大气压;
救援能力:155名失事潜艇艇员(视生命支持系统空气系统储量而定)。
SRDRS系统具有2种不同的配置:潜艇救援系统—救援功能系统(Submarine Rescue System-Rescue Capable System,SRS-RCS)与潜艇救援系统—带压转移(Submarine Rescue System-Transfer Under Pressure,SRS-TUP)。SRS-RCS功能相当于退役的深潜救生艇,该系统能救援内压为常压的失事潜艇艇员。SRS-TUP系统计划于2011年交付美国海军,能够救援艇内压力大于常压的失事潜艇中的艇员(最大内压为5个大气压),目前美国海军还不具备相关能力。
3)系统优势
不需要配置专用母潜艇或专用母船;
带压转移(Transfer Under Pressure,TUP)能力;
反应时间更快;
能容纳更多的人;
能与倾角为45°的失事潜艇(disabled submarine,DISSUB)进行对接;
对推进系统、导航系统和控制系统进行了技术升级;
维护费用更低。
1.2 北约
北约潜艇救援系统(NATO Submarine Rescue System,NSRS)由英国、法国、挪威联合研制,其设计服役期为25年,以苏格兰法斯兰的克莱德为基地,由巴布科克国际公司提供工程保障、运行和维护,确保系统达到要求的能力,在72小时内部署到全球任何地点并进行营救。巴布科克国际公司为NSRS提供以下支持:基本设施,提供存放、保障和维护需要的所有基本设施[5]。
北约潜艇救援系统主要由干涉系统和救援系统2个子系统组成:干涉系统是1个相对较小的子系统,主要由1个干涉遥控潜器组成,能够快速部署到潜艇遇险地点,为救援做现场准备工作,并提供生命保障;救援系统是1个较大的子系统,由1个自航救援潜器、便携式发射和回收系统、受压状态下转移系统和其他相关的保障装备组成(见图3)。
英国国防部负责北约潜艇救援系统所有合同的管理,并指定罗尔斯·罗伊斯公司作为整个救援系统设计、建造和运行的主承包商。佩里·斯林斯贝系统公司主要负责救援潜器和干涉遥控潜器的设计和建造,迪威克斯公司负责受压状态下转移系统,工程商业公司负责布放和回收系统。

图3 由法国、挪威和英国联合研制的北约潜艇救援系统Fig.3 The NATO submarine rescue system(NSRS)joint developed by France,Norway and the United Kingdom
1.2.1 系统组成[6]
1)干涉系统
这是1个独立的系统,通常情况下作为第1个系统进行部署,主要由干涉遥控潜器及其保障装备组成。干涉遥控潜器的保障装备包括1个A型的布放和回收系统、绞盘和脐带、控制舱、导航和跟踪装备、发电装置。
干涉系统负责潜艇救援第1阶段的任务,包括在干涉遥控潜器的帮助下对遇险潜艇进行定位,清除阻塞逃生舱口的障碍并探测核辐射,使用水下电话或其他方式与遇险艇员建立通信。如果需要,立即采取措施稳定遇险潜艇上的状况,并为等候救援的艇员提供包括氧烛、二氧化碳洗涤器、医疗补给品、食物、饮用水等的紧急生命救助物资。
2)救援系统
救援系统主要包括潜艇救援潜器、便携式布放和回收系统、受压状态下转移系统,以及相关的保障装备。救援系统负责潜艇救援第2阶段的任务,包括使用救援潜器对幸存艇员实施救援,并使用安装在水面母船上的受压状态下转移系统对救援上来的幸存艇员进行减压治疗。救援潜器能够在610 m的深海对遇险潜艇进行定位并实现对接。在进行压力补偿后,救援潜器一次最多可以转移15名遇险艇员。潜艇救援潜器回到水面母船后,通过操作甲板支架使救援潜器与受压状态下转移系统进行对接,对受压状态下的艇员进行转移和安全的减压,同时救援潜器进行下一次的下潜救援。
潜艇救援潜器长约9 m,重约30 t(见图4)。包括1名驾驶员、1名副驾驶员和1名救援舱操作员。救援潜器的救援舱能够在不超过6个大气压的压力下,把受压状态下的遇险艇员转移到减压设施中。
便携式布放和回收系统重100 t,安全工作载荷为30 t,装备了升力补偿绞盘和运动阻尼器,可在极端负重环境下安全作业。布放和回收系统通过使用导向索、水下作业和1个捕捉锁定装置在高海况环境下对救援潜器进行安全回收,而不需潜水员下水系上绳索,能最大限度地保证所有人员的安全。
受压状态下转移系统由1个甲板转移舱、2个大型减压舱以及相关的保障装备组成,总重量约120 t(如图6)。救援潜器一旦回到母船,幸存艇员就被转移到受压状态下转移系统,在那里进行必要的减压治疗。减压舱内包括环境控制设施、氧气储存和复杂的控制中心,其中有可容纳30人的主舱室和相对较小的医疗舱,医疗舱可容纳6人或2副担架,转移舱可容纳12人。
便携式导航、跟踪和通信系统位于1个集装箱内,用于跟踪北约潜艇救援系统的水下装置,并用于救援潜器与遇险潜艇之间的通信。采用1种便携式声学定位系统和部署系统,救援小组可以在主要的装置之间,包括救援潜器、干涉遥控潜器、遇险潜艇和母船,进行定位和导航。
保障装备。保障救援作业还需要很多的其他保障装备,其中包括1个专门的动力系统、医疗补给、海上生命安全公约装备、防护衣、各种工具和备用部件。

图4 北约潜艇救援系统救援潜器概念图Fig.4 The concept view of NSRS
1.2.2 系统性能[6]
1)高性能的“斑马”电池
北约潜艇救援系统的救援潜器装备了“斑马”电池,代替了以前深潜器使用的铅酸电池。 “斑马”电池采用了钠-氯化镍电池单元,能量密度很高。相比同样的铅酸电池,“斑马”电池模块能多提供约1倍的能量,而重量却只有铅酸电池的60%左右。救援潜器约102 kW/h的能量用于主动力系统、电力推进以及水动力系统,超过34 kW/h的能量用于仪器的使用、控制、通信以及生命保障系统。这么多储存的能量可以容许安装大功率的系统,且不会因此减小任务持续时间,或者在不需要大功率系统的情况下,延长执行任务的时间。
2)高质量的音频、视频和声呐通信
北约潜艇救援系统的救援潜器通过1根直径为5 mm的光纤与母船相连,可以保证进行高质量的音频、视频和声呐通信,消除了更大、更重的脐带连接所带来的不便。光纤可以使救援潜器独立于母船的水面运动,并且由于直径较小,产生作用于救援潜器的水流拖曳力很小。另一个关键的好处是在救援潜器陷入潜在的纠缠期间,由于光纤的断裂载荷只有400 kg力,舰载切割器或者救援潜器主推进力或辅助推进力将可以切断脐带。在脐带损坏或者断裂的情况下,救援潜器的通信回归到“水声通信”来维持救援潜器完整的操作能力。
3)在高海况下进行部署和回收
北约潜艇救援系统最大的进步就是执行没有潜水员的回收作业,从而可以在高海况下进行救援。没有潜水员的回收需要2个步骤,首先在救援潜器与母船之间建立连接,然后使用这个连接回收救援潜器。连接的方法是:在水面母船的帮助下,先在海床上布放1个重物快,然后救援潜器通过1根小直径的缆线与重物块建立连接,救援潜器和重物块一起浮出水面。小直径的缆线与布放和回收系统相连接,当缆线绷紧后,1个与起重线相连的捕捉锁定装置就放到水面上,捕捉并锁住救援潜器,然后提升救援潜器,救援潜器的回收就完成了。
1.3 英国
英国的潜艇救援中心位于格拉斯哥北部的伦弗鲁,离格拉斯哥和普雷斯特维克的机场都很近。英国的潜艇救援系统可为皇家海军提供全面的在世界范围内的潜艇救援服务,可在接到命令的12 h内赶到失事潜艇现场,展开救人或提供生命支持服务[1]。
1.3.1 LR7型深潜救生艇
除了参与研制NSRS,由佩里·斯林斯比系统公司研制的LR7型深潜救生艇代替了之前的LR5,成为英国的主要救生装备之一。
LR7全长25英尺 (约7.6 m),可在300 m深潜航12 h以上。艇内设有横向连接的3个球形舱室,前舱为驾驶室,中舱和后舱用于救生[7]。执行任务时,首先通过艇首的球形透明罩确定失事潜艇方位,然后借助艇体下方的裙罩与后者对接,失事艇上人员即可安全转移至救生艇内。根据设计指标,LR7可在恶劣海况下对各种型号的核潜艇及常规潜艇实施救援,每次最多能搭载18名遇险者。LR7型深潜救生艇的优势在于小巧灵活,能通过铁路或空运迅速抵达事故现场。LR7是目前全球最大型且最先进的救援潜艇,能潜入水下300 m左右,可搭救18名遇险人员。
1.3.2 MK10潜艇逃生浸没装置
目前,英国皇家海军使用的是博福特海-空救助有限公司的MK10潜艇逃生浸没装置。MK10潜艇逃生浸没装置如图5所示,包括几个关键组成部分:1套全身衬里保暖的干式救生服、头套、浮力肩围、内部保温服以及单人气垫救生筏。一旦决定逃生,全体艇员都要装备潜艇逃生浸没装置。逃生艇员将戴上鼻夹、头罩进入逃生塔,逃生服的主要入口拉链和头罩拉链都具有气密性和水密性。潜水服的空气由头罩充气系统供应。
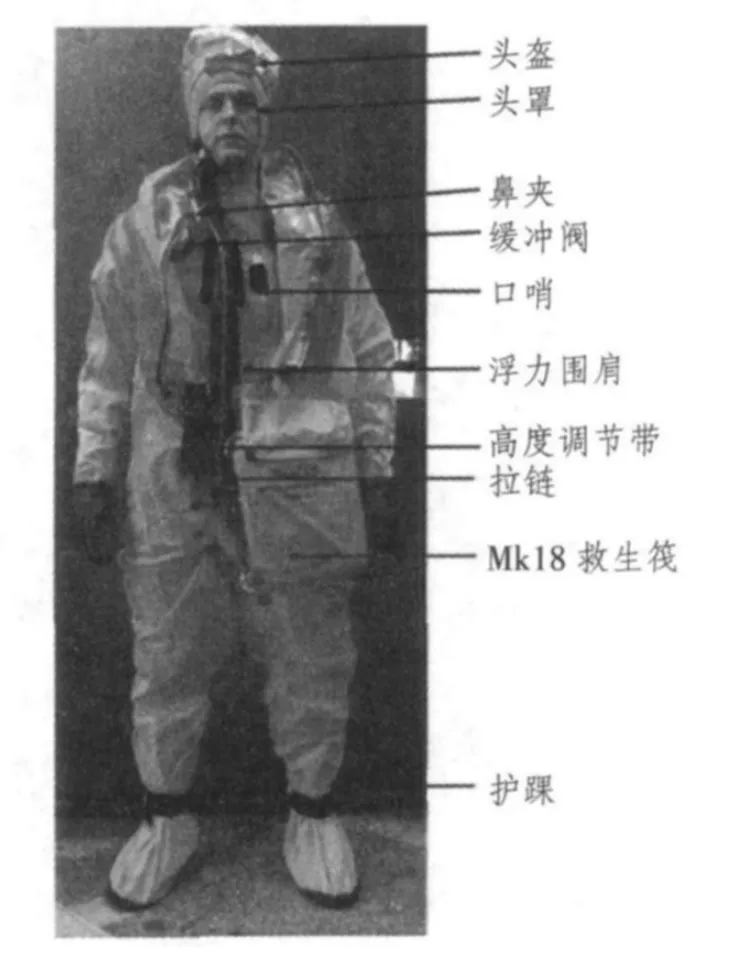
图5 MK10潜艇逃生浸没装置Fig.5 Submarine immersion suite of MK10
逃生塔开始注水以后,头罩充气系统将持续供应空气,这样可以确保头罩充气并减少水进入头罩的可能性。逃生塔内注满水后,舷外顶盖将打开,充满空气的头罩和浮力围肩将会提供浮力,让逃生艇员快速上浮,上浮速度达到2~3 m/s。上浮过程中围肩内的空气会膨胀,进入头罩。多余的空气将通过头罩末端的开口排出。
1.4 德国[8]
德国的霍瓦兹·德意志造船厂(HDW)研制的HABETaS系统能让艇内人员在没有第三方协助的情况下从潜艇逃生。HABETaS代表 HDW,AMITS,BFA(现在称 DSB)和 Escape Technology advanced SPES。这里的 SPES表示 Single Person Escape Suit(单人救生衣)。基本上,这是一个优化了的自由上浮系统。
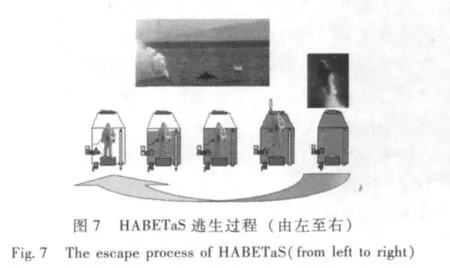
如图6所描述的,HABETaS潜艇调压筒逃生系统由注水控制阀,充气控制阀,自动排气阀和BFASPES 10救生衣等组成。优化这些部件是为了满足筒内注水、压缩和排水的需要。而且还要使用优化了的SPES救生衣。筒顶的喷射孔是用来使压缩引起的高温空气降温。
失事潜艇内的艇员穿上(BFA-SPES 10)救生衣,然后进入筒内并关闭内舱口盖,将充气软管接头接到充气阀使之与救生衣连接。此后通过海水控制阀向筒内注水。当水达到一定高度后自动排气阀关闭。自那时起筒内压力每4 s成倍增加直到筒内压力与外部水压相同。当压力达到平衡后,操作员打开外部舱口盖。艇员再解开充气软管接头并上升到水面。注水阀和筒外部舱口盖将从潜艇内被关闭。锁上舱口盖后再打开排水阀,直到筒内水被排出再开始下一个循环。

一般情况下,漂浮救生舱的浮力足以使其与潜艇分离。在特殊情况下,比如潜艇搁浅在岸边向一侧大幅度倾斜,有必要用可移动支架提供的浮力将漂浮救生舱推出。潜艇在水面时GFK救生艇舱没有可起作用的浮力。在此状况下,漂浮救生舱需要浮力系统使其移动,艇员也能够使艇舱上升进行维护和保养。霍瓦兹造船厂在新造的潜艇中已60多次成功安装了这种救援系统。
HABETaS系统可被应用在现有的任何潜艇上,它的优势如下:
1)可从水下很深的位置实现单人艇内逃生(可实现单人至小组上升)。
2)采用给定的空气存储装置,使每个逃生者的空气消耗降低到最低极值,达到逃生人数的最大化。
3)除了压缩空气再没有能量来源 (系统组成部分没有电或氢驱动的部件)。
4)逃生装置拥有尽可能大的浮力,完成压缩后,上升到水面所需的时间将降至最少。
5)注水并压缩空气所需的时间将被减少到最低值 (比一般自由上浮系统节约33%的时间),这是逃生者可忍受的时间范围。
1.5 瑞典[9]
瑞典潜艇救援系统S-SRV是考库姆公司研制的第二代潜艇救援系统,它是在瑞典海军原有的救援系统R35 URF的基础上改进而成的,S-SRV的研制是为了满足北约对于潜艇救援系统的要求。
S-SRV的最大水下援救作业深度为700 m,与潜艇的对接角度可以达到60°。单次作业可援救35名失事艇员,可对失事潜艇开展高压援救并实施在高压下的人员转运。艇员通过援救舱口进入救援隔离舱,并可以将他们从失事潜艇的加压环境中安全运走。该系统可以将处于失事潜艇加压环境的所有艇员直接运送到母舰的减压舱中,具有良好的机动性和可操纵性。该潜艇救援系统可由铁路、公路、各种舰船和飞机运送,并可由不同型号的水面舰船和潜艇操作使用,到达救援位置后,S-SRV可通过自己的声呐设备定位失事潜艇。从其性能和作业能力看,该救生器是目前世界上同类装备中最先进的援潜救生系统。
S-SRV系统的基本参数如下:
工作深度 700 m;
航速 4.5 kn;
一次救援能力 35人;
高压转换 7(9)bar
对接角度 0~60°;
艇员 2名驾驶员,1名救生员。
图8 S-SRV剖面图Fig.8 The profile section of S-SRV
1.6 澳大利亚[10]
澳大利亚援潜救生艇“印鱼”号的主要技术指标如下:
空气中重量 16.7 t;
援救能力 6人,可携带1名医疗人员,不具备伤亡医疗处理系统;
操作条件 最大工作深度525 m;海况<5级(波高4 m);
加压能力 最大5 bar,2间9 m宽减压舱与移动式加压舱相连,可容纳26人;
循环时间 3 h;
航速 3 kn。
对母船的要求,需满足甲板宽为8 m,面积500 m2左右,不能小于300 m2,且电力供应为440 V,三相交流电495 kW。1台发电机为主要船电设备,另1台备用。对接能力方面要求对接转裙与北约STANAG 1297相匹配,最大援救倾斜度可达60°。吊放系统为A字吊。
对操作人员的要求有,需民用人员:SERS管理人员、驾驶员、导航员、绞车操作人员、吊放回收操作员,2名甲板指挥员和救生钟操作人员。军用人员:救援部队及其辅助人员,以及多名医疗人员。
1.7 俄罗斯[11]
目前,俄罗斯在潜艇救援方面采取了一些重要举措。尽管国内有不少批评声音,俄罗斯政府还是接受了“应对突发灾难较差的反应能力导致了灾难性后果”的结论,俄罗斯海军开始投资潜艇救援能力建设。作为上述努力的一部分,俄罗斯从苏格兰SMD公司和英格兰Fareham Saab SeaEye有限公司购买了2艘遥控潜水器(Remotely-Operated Vehicles,ROV)。其中1艘潜水器是SMD公司制造的“蜘蛛”级遥控潜水器,它配备了机械手和声呐设备。此外,俄罗斯海军还购买了7艘Saab SeaEye有限公司的“虎”式遥控潜水器用于执行检查和观察任务。按照作业流程,“虎”式遥控潜水器先对失事潜艇 (Distressed Submarine,DISSUB)进行勘测,然后“蜘蛛”级遥控潜水器执行较繁重的工作,例如与失事潜艇建立通信线路和空气管路联接。在2006年,俄罗斯又购买了Saab SeaEye有限公司的“美洲豹”升级型遥控潜水器,进一步补充其舰队的救援力量。
俄罗斯购买英国的无人水下设备似乎源于英国遥控潜水器专家的先进技术给其留下的深刻印象。这种技术第一次成功应用是在2005年8月,当时“锦标”深潜救生艇正在执行训练任务,在俄罗斯远东地区堪察加半岛被水下水听器阵列的电缆缠绕。当时,俄罗斯政府快速反应,指派国防部长谢尔盖·伊万诺夫赶赴现场指挥救援,另外接受来自英国皇家海军和美国、加拿大、日本等国海军的救助。2天后,英国皇家海军的“天蝎”-45(该艇设计用于海底维护、定位、观测等工作)剪掉缠绕在潜艇上的电缆使其重返水面。
2 结语
当潜艇处于某些意外状况,特别是外部撞击等,其基本安全可能无法保障。对于这些状况,通过自身或者外部力量帮助来救援艇员的能力十分必要,在此过程中时间是最重要的因素。
因此,需把多种救援方式——集体救援、集体逃生,单人逃生等结合起来应用。在采用较为成熟、安全的集体救援方法如SRDRS、NSRS的基础上,也应把从失事潜艇逃生作为主要的救援手段。这是因为相对于救援系统需要在援救操作前进行部署,逃生的方式响应更快,几乎不会耽搁时间。使用SEIE等逃生装备虽可用于“迅速”逃生,但使用的深度有限,同时还有受伤的风险。集体逃生方式则更为理想。
[1]崔维成,叶聪,等.国际援潜救生装备体系现状与发展趋势[J].船舶力学,2008,12(5):156-170.
[2]LAPENNA J J.Surfacing rescue container concept design for trident submarines:rethinking submarine search and rescue[J].Naval Engineers Journal,2010,122(1):93 -109.
[3]THOMAS R,DESPIRITO A,BLEIBERG R.The application of classification to the U.S.Navy submarine rescue system[Z].
[4]GIBSON J,ENGLISH J.Pressurized rescue module system[Z].Underwater Intervention,January 2002.
[5]Babcock International Group.Submarine escape,rescue &abandonment-the integrated approach[Z],2009.
[6]JOHN M.The NATO Submarine Rescue Vehicle System.UI2008.
[7]英国最顶级LR7救援潜艇[EB/OL].http://www.sina.com.cn/2008-09-17,中青在线-青年参考.
[8]BRANDT H.Rescue technologies improving submarine safety[Z].UDT,2010.
[9]http://www.Kockums.com/S-SRV.
[10]FRANK O.Submarine rescue with an australian twang,in depth rescue[Z].A Newsletter for Submarine Rescue Professionals,2004,1(3):1 -6.
[11]WITHINGTON T.Submarine rescue:KURSK ten years on[J].Naval Forces,2009,(5):68-73.
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:36:42
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:38
数字海洋与水下攻防(2022年2期)2022-04-26 09:09:24
小哥白尼(军事科学)(2021年6期)2021-11-02 05:25:10
小哥白尼(军事科学)(2021年12期)2021-03-29 00:49:14
小哥白尼(军事科学)(2021年11期)2021-02-28 08:29:32
中国疗养医学(2020年5期)2020-05-19 08:35:56
舰船科学技术(2017年5期)2017-06-19 19:18:59
船舶标准化工程师(2015年5期)2015-12-03 11:00:18
海军医学杂志(2015年2期)2015-02-27 13:47:36