转向目标逆合成孔径成像技术
2012-08-21 01:32:32何心怡邓建辉
舰船科学技术 2012年10期
何心怡,邓建辉,蒋 飚
(1.海军装备研究院,北京 100161;2.杭州应用声学研究所,浙江 杭州 310012)
0 引言
合成孔径是目标不动、利用基阵的空间运动采样,通过相干处理合成远大于基阵物理孔径的虚拟孔径,获得远大于物理孔径的方位分辨力和成像精度。合成孔径方法已成功应用于雷达和声呐等领域[1-2]。合成孔径常用的工作模式有条带测绘(strip-map) 模式和聚束合成孔径(spotlight)模式[1],其中,聚束模式要求在每个采样位置,均应将波束对准目标区间,可获得比条带测绘模式更高的沿轨分辨力,但采用聚束模式的成像系统较为复杂。目前,国外合成孔径声呐大多采用条带测绘模式。
与合成孔径相反,逆合成孔径是自身不动、利用目标的运动来合成较大的虚拟孔径,提高分辨力[3];根据运动相对性原理,逆合成孔径也可运用于自身运动、目标运动的场景。雷达经常采用逆合成孔径 (inverse synthetic aperture radar,ISAR[4])或SAR/ISAR组合处理方式[2],以提高对目标的识别能力和雷达的综合性能。与此同时,在水声领域,逆合成孔径成像技术也得到了快速发展,如WALKER J L研究了旋转运动目标的距离-多普勒逆合成孔径成像方法[4],LIU D D和TANG J S研究了直线运动目标的逆合成孔径声呐成像方法[5]。
综合来看,合成孔径成像技术适用于对静止目标成像,如对大面积海底测绘;而逆合成孔径成像技术适用于对动目标成像,特别适用于声呐和声自导鱼雷的目标识别领域,提高声呐的目标类型识别能力和声自导鱼雷的真假目标识别能力与要害部位识别能力,具有重大的军事应用前景[6]。
为进一步推动及深化水中目标逆合成孔径成像技术研究,本文针对目标的转向运动,构建了转向运动信号模型;研究提出了频域反向投影法和等效圆周合成孔径法,并通过仿真试验验证了2种成像方法的正确性、有效性和可行性。文中研究内容可供声呐及鱼雷自导信号处理研究人员参考。
1 信号模型
采用类似声层析的信号模型[7-8],建立如图1所示的收/发基阵与目标的空间几何关系,发射基阵到目标坐标系原点的距离为r0,目标上任意一点(x,y)的反射系数函数为 ff(x,y)。
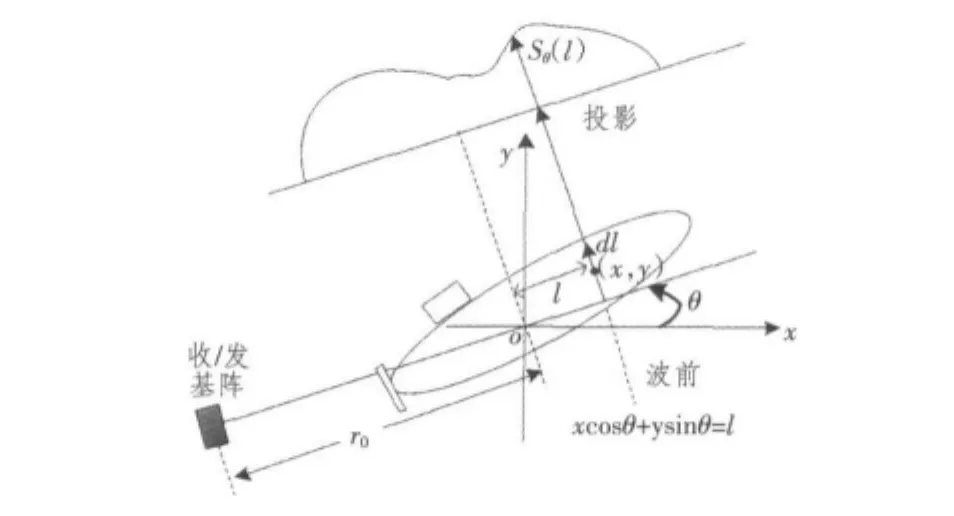
图1 收/发基阵与目标的几何关系Fig.1 The geometry relationship chart between the receiving/sending array and target
借鉴声层析技术,将目标的转向运动等效为基阵围绕目标做圆周运动。假设基阵位于x轴负半轴x=–r0处,则当目标顺时针旋转θ角度时,等效为基阵以r0为半径圆周运动到图1中所示位置,此时信号传播方向与x轴的夹角为θ;当目标距离满足远场条件时,入射波可看成平面波,波阵面上目标所有反射点的回波信号产生同相叠加,即沿直线xcosθ+ysinθ=l(l为原点到波前的距离)的波前积分:

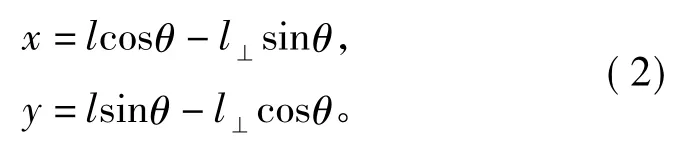
s(l,θ)是目标反射系数函数ff(x,y)在信号传播方向上的投影信号,(l,l⊥)表示(x,y)旋转θ后的坐标。那么:
通过上述分析可知,转向运动目标的逆合成孔径成像,就是根据目标在不同转向角的回波信号s(l,θ),通过某种图像重构算法,形成目标图像ff(x,y)。
2 逆合成孔径成像算法
在上节建立的转向运动目标信号模型的基础上,提出频域反向投影法和等效圆周合成孔径法2种逆合成孔径成像算法,并阐述这2种算法的原理及信号处理过程。
2.1 逆-Radon变换法
用于逆合成孔径成像的图像重构算法通常有逆-Radon变换法等[8]。由于式(1)可看作是 ff(x,y)的Radon变换,因此,通过逆-Radon变换可重构得到目标图像,即
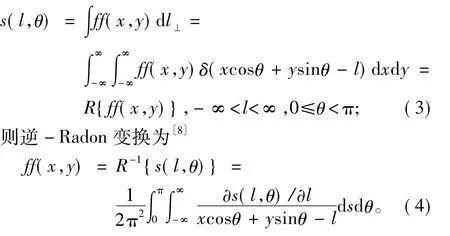
也可根据下式分2步实现:每个投影信号s(l,θ)先经过一个频率响应为|k|的滤波器,再对滤波后的信号进行反向投影重构图像,即

其中,B{·}表示反向投影算子,具体定义见参考文献[7]和[8]。

2.2 频域直接反向投影法
按式(5)所示的逆-Radon变换法先进行波数域滤波,再返回投影信号距离域进行反向投影处理,整个实现过程较为繁琐,计算量大。
有鉴于此,基于投影距离与回波到达时间的关系,研究提出频域反向投影法。该算法直接在频域进行反向投影逆合成孔径成像,使得成像在原理上更为清晰,算法易于实现且计算量小。
考虑回波到达时间变量t与l的关系为

将时间原点平移到以r0为中心,则频域反向投影法直接对传播方向上以l为变量的投影信号的频域信号进行频移相加,即

式中k=ω/c为波数。
改变式(8)中方位角θ的积分区间和区间大小,相当于改变了逆合成孔径的大小。分析式(8)可知,理想的逆合成孔径大小为π。
2.3 等效圆周合成孔径法
在逆合成孔径成像场景中,可将目标运动等效为基阵围绕目标做匀速圆周运动,受此启发,研究提出了等效圆周合成孔径法进行逆合成孔径成像。运用该算法,在一定方位扇区内,通过坐标映射和二维反傅立叶变换,可提高成像运算效率。
对式(3)进行空间傅里叶变换,得

根据式(9),采用二维反波数域傅立叶变换,可得目标图像函数:
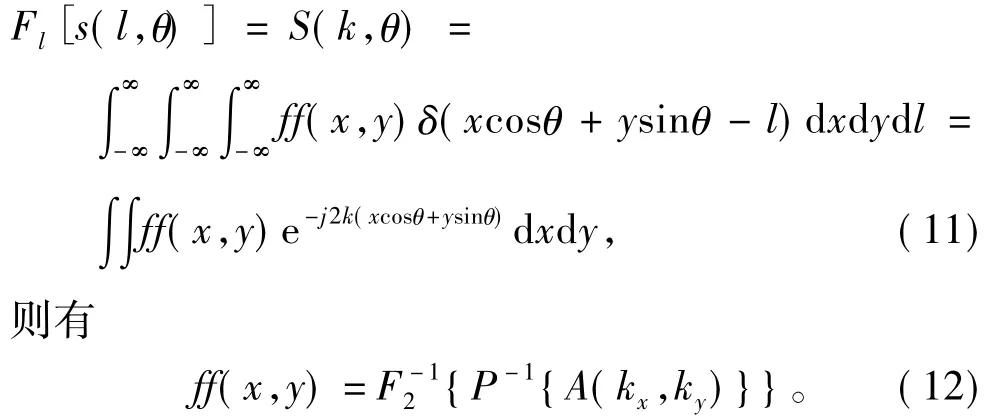
其中A{·}表示坐标变换。坐标变换的目的是要将非均匀采样的波数数据A(kx,ky)映射到均匀采样栅格上。坐标映射采用双线性内插法(bilinear interpolation),对于旋转运动目标而言,是要从极坐标(k,θ)映射到矩形栅格的直角坐标(kx,ky)。二维波数数据采集与坐标映射如图2所示。图中,每个圆弧表示1个波数扇面,黑点表示扇面上的均匀采样,矩形区域的栅格表示进行坐标映射后的波数采样,从而可以对均匀的矩形栅格波数数据进行二维IFFT变换,得到目标的图像数据。

图2 二维波数数据采集与坐标映射示意图Fig.2 The sketch map of two-dimension wave number data acquisition and coordinate mapping
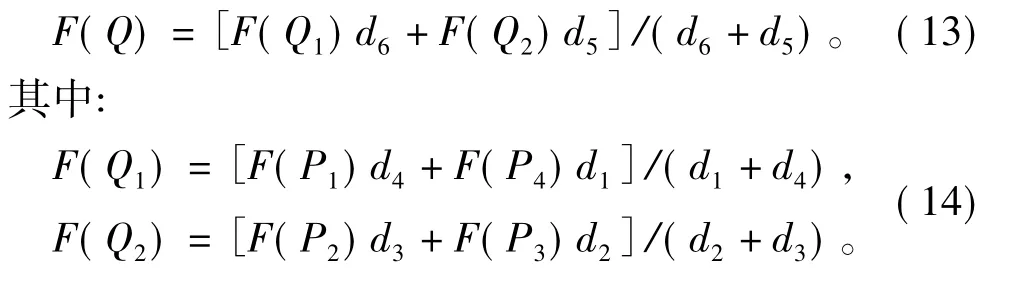
坐标映射采用双线性内插,如图3所示。矩形栅格上某一点Q的值通过周围的P1~P4点的值内插得到。

图3 双线性内插示意图Fig.3 The sketch map of bilinear interpolation
设P1~P4点的值为F(P1)~F(P4),则Q点的值为[8]
3 仿真分析
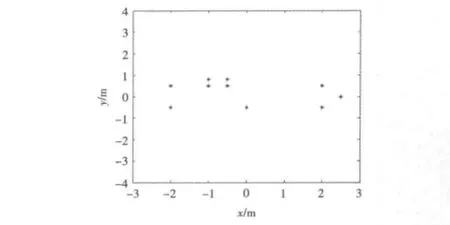
图4 目标亮点模型Fig.4 The multi high light model of target
以多亮点模型为理论基础,建立某水下目标的多亮点模型。该水下目标等效为由10个亮点组成,其亮点分布见图4。发射基阵到目标坐标系的距离为30 m,发射中心频率为30 kHz、带宽为20 kHz的LFM信号,频点数为1024。目标每次旋转0.35°。采用频域反向投影算法的成像结果如图5所示。可见,随着频域反向投影成像时参与计算的目标转向点数的减少(即相当于逆合成的孔径减小),目标亮点图像逐步出现模糊,且背景噪声增大。

图5 频域反向投影法成像效果与θ范围的关系Fig.5 The relationship between θ range and imaging quality of frequency domain backprojection method
图6为等效圆周合成孔径法的成像结果,θ范围为40°~140°。可见,等效圆周合成孔径法在提高逆合成孔径成像算法效率的同时,能够有效保证目标图像质量。但根据图2,要内插获得二维均匀栅格的波数域数据,必然要损失部分信号角度区间,即逆合成孔径大小有少许受损,成像效果将有所下降。
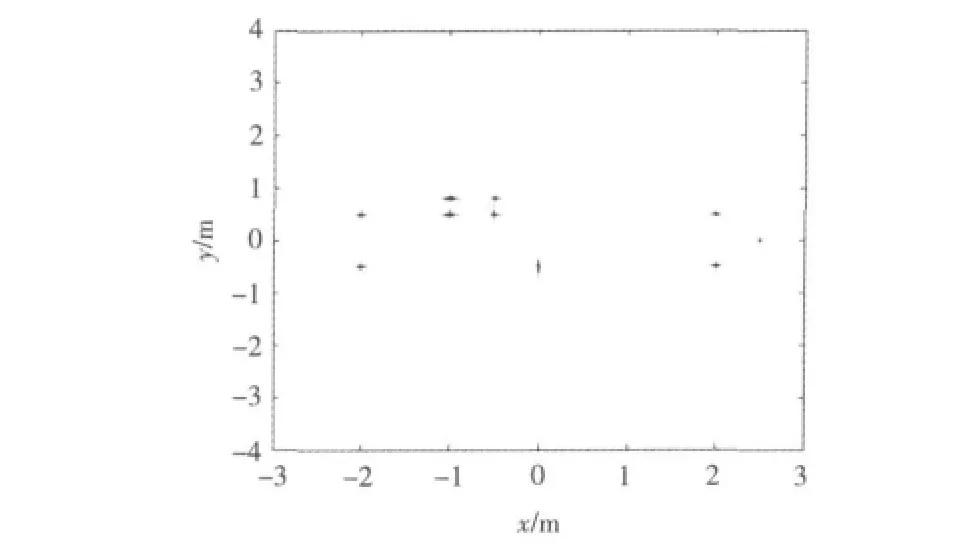
图6 等效圆周合成孔径法成像结果 (θ范围:40°~140°)Fig.6 The imaging quality of equivalent circular synthetic aperture method(θ range:40°~140°)
综上分析,经仿真验证,频域反向投影法和等效圆周合成孔径法是正确的、有效的和可行的。
4 结语
本文研究了转向运动目标的逆合成孔径成像技术。借鉴声层析技术,将目标的旋转转向运动转化为基阵的圆周运动,进而建立了转向运动目标的信号模型;研究了频域反向投影法和等效圆周合成孔径法2种逆合成孔径成像方法。仿真试验证明了这2种成像方法的有效性,其中:在等效信号入射角覆盖0~180°范围时,频域反向投影法可获得理想的成像效果,随着覆盖角度 (逆合成孔径大小)的减小,图像逐渐模糊;等效圆周合成孔径法采用双线性内插和二维傅里叶变换,在稍损失逆合成孔径大小的情况下,可以有效提高计算效率。
实际水下目标的运动是切向、径向和转向运动的综合,且具有前后、左右和上下的姿态起伏。因此,水中目标逆合成孔径处理需要进行多维运动分解和运动参数补偿;同时,为扩大逆合成孔径的大小,也可考虑综合应用条带测绘模式和聚束模式。
[1]GOUGH P T,HAWKINS D W.Unified framework for modern synthetic aperture imaging algorithms[J].Int.J.of Imaging Systems and Tech.,1997,(8):343 -358.
[2]PORTER N J,TOUGH R J A,WARD K D.SAR,ISAR and Hybrid SAR/ISAR-A unified treatment of radar imaging[A].Proc.IEEE National Radar Conference’93,Apr.1993.134 -139.
[3]VAN ZYL M W.Inverse synthetic aperture radar images of moving targets[A].Proc.COMSIG’91,Aug.1991.42-46.
[4]WALKER J L.Range-Doppler imaging of rotating objects[J].IEEE Trans.Aerospace and Electronic Systems,1980,16:23-62.
[5]LIU D D,TANG J S.A new mode of target-motion-inducedsonar imaging and processing[A].Proc.ICSP’08,Oct.2008.2567 -2570.
[6]何心怡等.逆合成孔径成像技术在声自导鱼雷中的应用研究[J].舰船科学技术,2008,30(1):96 -100.
[7]FERGUSON B G,WYBER R J.Generalized framework for real aperture,synthetic aperture,and tomographic sonar imaging[J].IEEE Journal of Oceanic Engineering,2009,34(3):225-238.
[8]FERGUSON B G.Application of acoustic reflection tomography to sonar imaging[J].J.Acoust.Soc.Am.,2005,117(5):2915-2928.
猜你喜欢
声学技术(2023年4期)2023-09-14 01:00:12
电子测试(2022年16期)2022-10-17 09:32:26
潍坊学院学报(2021年2期)2021-07-22 07:59:24
电脑知识与技术(2019年13期)2019-07-08 02:23:41
水下无人系统学报(2018年5期)2018-11-09 07:40:54
声学与电子工程(2017年1期)2017-06-22 11:30:07
中国新通信(2017年4期)2017-04-10 11:10:46
西北工业大学学报(2015年3期)2015-12-14 13:08:44
声学技术(2015年1期)2015-09-07 06:44:52
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:23