
基于AVL数据的公交到站时间实时预测模型
2012-08-16 02:25:14高云峰刘志钢
重庆交通大学学报(自然科学版) 2012年5期
胡 华,高云峰,刘志钢
(1.上海工程技术大学 城市轨道交通学院,上海201620;2.上海海事大学 交通运输学院,上海201306)
公交车辆到站时间预测是公交到站信息服务、公交动态调度的关键参数[1]。目前已建立的公交智能化调度系统中,公交车辆下班车预测到站时间大都采用车辆当前位置到达车站站牌的距离和平均行车速度之比简单计算而得,预测结果和实际到站时间往往相差很大。
在理论研究方面,国内外学者提出了很多公交车辆到站时间预测模型和方法,如历史趋势方法、回归分析方法、时间序列模型、人工神经网络方法、卡尔曼滤波方法、随机服务系统方法等[2-4]。然而,在变化的交通状况和任意时段的条件下,上述模型和方法都未能取得令人满意的预测结果。究其原因,主要是由于我国城市公共汽车交通运行环境复杂和公交优先运行条件尚不完备,导致公交车辆的到站时间随机性强。因此不能简单忽略动态随机状况,而仅仅依靠历史数据规律进行到站时间预测。自动车辆定位技术(Automatic Vehicle Location,简称AVL)逐渐成熟以及AVL车载机在公交车辆中的普及应用,为公交车辆到站时间实时预测提供了良好的基础数据环境。应用先进的信息和通讯手段,研究高性能的公交车辆到达时间预测技术,对实现公交系统信息化和智能化,推动城市公共交通改善管理水平和服务水平具有重要意义。
1 AVL数据需求
公交车辆到站时间预测模型以大量AVL直接或间接运行数据为基础,包括公交车辆的实时位置及速度、站间运行时间、站点停靠时间等。因此,AVL数据质量直接影响到模型预测精度,需要采取以下方法来提高预测所需AVL数据的准确性和可靠性。
1)异常AVL数据的预处理:由于采集过程中的某些因素的干扰,使得实际采集到的AVL数据可能存在着异常情况。因此必须对这些数据进行预处理,如剔除严重阻塞、交通事故等异常条件下的历史运行时间数据,修复缺失及错误数据,具体处理方法见参考文献[5]。
2)AVL数据划分:公交车辆到站时间的预测精度与车辆历史运行状态及实时运行状态的相似程度有关。考虑数据获取的难度,笔者以特征日(周末或工作日)、路段、时段、线路及其运行方向(上下行)为影响因素对AVL数据进行分类划分和预测。
2 公交车辆到站时间构成要素划分
公交车辆到站时间是指公交车辆在运营线路某一方向上从当前位置行驶到下游某一站点所需的时间。设公交线路上共有1,2,…,n个站点,根据可获得的AVL原始数据,笔者以公交站点为节点,将公交线路划分为1,2,…,n-1个区段,区段i定义为公交车辆到达i站至(i+1)站之间的物理区间,见图1。

图1 公交车辆到站时间构成要素划分示意Fig.1 Elements division of bus arrival time
设公交车辆当前位于区段m(1,2,…,j-1)内,预测站点为j(m+1,…,n)。由图1可见,公交车辆任意当前位置到达预测站点的行程时间被划分成3个组成部分,分别进行如下定义:
1)公交车辆从当前位置到达预测站点途经各站点的停靠时间,即 Di(m+1≤i≤j+1),min。
2)公交车辆从当前位置到达该区段终点(下游临近站点)的运行时间,称之为区段部分运行时间,即 Ti=Tm,min。
3)公交车辆在当前位置到达预测站点途经各区段的起终点之间的运行时间,称之为区段全程运行时间,即 Ti,i+1(m≤i≤j-1),min。
则公交车辆从当前任意位置至预测站点的行程时间计算公式见式(1)。

3 基于AVL数据的公交车辆到站时间实时预测模型
由式(1)可知,公交车辆从任意当前位置至预测站点的行程时间由站点停靠时间、区段部分运行时间和区段全程运行时间构成。下面分别对其进行预测。
3.1 基于点估计的站点停靠时间预测模型
根据上述定义,站点停靠时间是指乘客的上下车时间,可以通过车载终端(如公交车行车记录仪,公交车停站时间监控仪)发回的车辆到离站开关门信息实时获取[6]。笔者将预测日预测时段的前两个时段及预测日前两个相同特征日i站的停靠时间取平均值作为预测日预测时段i站的停靠时间预测值,见式(2):

3.2 基于BP神经网络区段全程运行时间预测模型
目前,在人工神经网络的实际应用中,BP神经网络(Back-Propagation Network,简称BP网络)由于具有较强的非线性映射能力,因而得到了最为广泛的应用。它可用于函数逼近、模式识别、数据压缩等,文中的区段全程运行时间预测就属于BP神经网络在函数逼近方面的应用。
BP神经网络的设计要素包含转移函数、网络结构和学习规则,其中转移函数的相关研究已经比较成熟[7],仅对本预测模型的网络结构和学习规则进行设计。
3.2.1 网络结构设计
经过测试,采用单隐层模型收敛困难。因此,笔者采用4层神经网络(双隐层)结构,综合考虑预测日当前时段和历史相同特征日相同时段的数据对下一时段的区段全程运行时间进行预测,设计的神经网络结构示意如图2。

图2 区段全程运行时间预测的BP神经网络结构示意Fig.2 Back-Propagation network algorithm framework for the section running time prediction
3.2.2 网络学习规则
BP神经网络模型通过对历史数据的训练学习来掌握输入和输出影响因素的关系。评价神经网络设计的优劣首先取决于学习完成网络的预测精度,其次在于网络的学习时间。已有研究对不同的学习规则(训练函数)进行了对比试验[8],发现带动量和自动调整学习速率的学习规则(traingdx)的预测精度最高,但学习时间相对较长,该学习规则修正权值Δωij的表达形式见式(3):

式中:e是期望输出与实际输出的误差;η表示网络的学习速率(η>0),在训练过程中其取值非常重要(当η取值过小时,网络收敛慢;当η取值过大时,学习过程变得不稳定导致误差过大);γ是动量因子(0<γ<1),通过引入γ可避免学习的不稳定和局部收敛。
学习率η和动量因子γ的恰当选取并非易事,通常凭经验和实验选取。文中γ的值将结合具体算例经多次实验计算选取得到,而η是自适应调整的。经验表明,学习率的增加量最好是个常数,但应按几何律减小,文中采取的自适应函数见式(4):

式中:Δe为每次迭代误差函数的变化;a,b为适当的常数。
3.2.3 网络训练停止规则
本预测模型以N个样本的方差小于收敛阈值作为训练的收敛条件,见式(5):

式中:TP和分别表示训练样本P的实际值和预测值;e为收敛阈值,其取值的大小决定了训练过程所需时间(e取得过小需要花费很长的训练时间,有时甚至无法收敛;e取得过大可能导致网络无法进行训练),文中将结合具体算例经多次实验计算选取得到e值。
3.3 基于自适应指数平滑的区段部分运行时间预测模型
如图1,当公交车辆驶离(i-1)站但未到达i站,其相应的区段部分运行时间计算公式见式(6)。

式中:Ti是公交车辆区段部分运行时间预测值,min;Li是公交车辆当前位置至临近下游站点i的距离,m;Vi是公交车辆当前位置至临近下游站点i的预测运行速度,m/s;Li-1,i是区段(i-1)的距离,min;Li-1是公交车辆在区段(i-1)内的已行驶距离。
其中,Li-1,i和 Li-1可以通过 AVL静态数据和实时定位数据获得,则Ti的值取决于Vi的预测结果。笔者将基于历史AVL数据得到的车辆预测运行速度和基于实时AVL数据计算得到的车辆当前运行速度进行自适应指数平滑,预测得到Vi,见式(7):

式中:Vpi是车辆当前运行速度值,指车辆在区段内已行驶路程的平均运行速度,m/s,其计算方法见式(8);Vi-1,i是基于历史AVL数据的车辆运行速度预测值,指该时段区段(i-1)的全程平均运行速度的预测值,m/s,其计算方法见式(9);δ是自适应平滑系数,其计算方法见式(10):

式中:Ti-1是车辆在区段(i-1)内的已行驶时间,由车辆当前位置时刻与车辆离开站点(i-1)的时刻之差求得,min;Ti-1,i是区段(i-1)的全程运行时间预测值,由第3.2节提出的预测模型求得,min;δ则反映了车辆当前运行速度(Vpi)在预测速度Vi中所占权重,其值随着车辆至下游站点i距离的减小而增大。当车辆到达站点i时,δ=1,Vi=Vpi,与实际情况吻合。
4 算例分析
4.1 原始数据
笔者以同济大学智能公共交通实验室提供的上海市某实验公交线路的AVL运行数据,对上述到站时间预测模型进行验证和评价分析。选取49路上行方向(共20个站点)、相同特征日(工作日)、威海路陕西北路—延安中路铜仁路—常熟路华山路站点间、早07:00—09:00共计115组(每组数据包含预测模型中所涉及的5个原始数据)区段全程运行时间(威海路陕西北路—延安中路铜仁路和延安中路铜仁路—常熟路华山路)和站点停靠时间(威海路陕西北路站和延安中路铜仁路站)的AVL原始数据进行预测。本算例中,所有预测结果均是利用MATLAB软件编程实现。
4.2 预测步骤
步骤1:区段全程运行时间预测。将选取的115组区段全程运行时间AVL原始数据,随机选出46组数据作为训练集,采用快速BP算法[7]和traingdx训练规则对BP神经网络进行训练,其余69组数据作为测试数据。笔者对隐层节点的个数进行了试验,最后选定第1和第2隐层分别为12个和3个神经元。预测结果见图3。
步骤2:站点停靠时间预测。将步骤1中69组测试数据相对应的每组站点停靠时间AVL历史数据,根据式(2)取平均值作为该站点停靠时间预测值。
步骤3:到站时间预测。将步骤1与步骤2的每组预测结果分别求和,即得到预测站点(常熟路华山路站)的到站时间预测值。
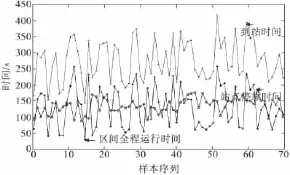
图3 基于AVL数据的公交车辆到站时间预测值Fig.3 Predictive values of bus arrival time based on AVL data
4.3 预测模型评价与对比分析
4.3.1 鲁棒性评价
鲁棒性评价预测结果波动的大小,主要评价指标是最大绝对偏差值。将69组到站时间预测值与实际值进行曲线拟合,结果见图4。从图4中可见,预测值与实际值最大绝对偏差值为55.7 s,在乘客可接受的预测误差阈值以内[9],表明该模型的鲁棒性较好。

图4 到站时间预测值和实际值对比Fig.4 Comparison between predictive values and actual ones
4.3.2 精确性评价
精确性用来评价预测模型的精度高低,主要评价指标是相对误差率和平均绝对相对误差率。预测结果的相对误差见图5,平均绝对相对误差率(MAPE)为11.5%,能够满足公交动态调度的精度要求(MAPE <15%)[10]。

图5 公交车辆到站时间预测值的相对误差Fig.5 Relative errors of predictive values of bus arrival time in the example
4.3.3 对比评价
笔者以上述69组到站时间真实数据,运用指数平滑法对其进行了预测。取α=0.05,指数平滑法的预测结果见图6,最大绝对偏差值为149.5 s,平均绝对相对误差率为20.0%,均大于本预测模型的误差值。因此,本预测模型的精度相对较高。

图6 指数平滑法与本预测方法的预测结果对比Fig.6 Comparison between predictive values based on exponential smooth method and the ones in the example
5 结论
公交车辆到站时间实时预测是实施公交动态调度和发布公交到站时间信息的关键支持技术。已有基于历史数据的预测方法因忽略公交运行的动态随机状况导致其预测精度较差。
笔者基于公交车辆的实时和历史AVL数据,将公交车辆行程时间划分为站点停靠时间、区段全程运行时间和区段部分运行时间,分别采用点估计法、BP神经网络方法和自适应指数平滑法对其进行预测,并利用从实验公交线路采集的AVL运行数据验证了本预测模型的有效性。研究结果表明,基于AVL数据的公交车辆到站时间实时预测模型,由于将历史数据规律和实时交通状况进行了有效融合,因此提高了公交到站时间的鲁棒性和预测精度。
[1]Abkowitz M,Engelstein I.Empirical methods for improving transit scheduling[C].World Conference on Transport Research:Research for Policies in a Changing World.Hambwrg,Germany,1983:884-885.
[2]Chien S,Ding Y Q,Chien H W.Dynamic bus arrival time prediction with artificial neural networks[J].Journal of Transportation Engineering,2002,128(5):429-438.
[3]孙喜梅,杨兆升.城市公共交通站点间实时动态行程时间预测的模型[J].吉林大学学报,2002,32(1):47-51.Sun Ximei,Yang Zhaosheng.The model of real-time dynamic travel time prediction between urban public transportation stop[J].Journal of Jilin University:Engineering and Technology,2002,32(1):47-51.
[4]杭明升,杨晓光,彭国雄.基于卡尔曼滤波的高速道路行程时间动态预测[J].同济大学学报,2002,30(9):1068-1072.Hang Mingsheng,Yang Xiaoguang,Peng Guoxiong.Study of predicted travel time in urban expressway based on Kalman filter[J].Journal of Tongji University,2002,30(9):1068-1072.
[5]Aichong S,Hickman M.Vehicle Travel Time Prediction Using Primitive Automatic Vehicle Location Data[C]//Transportation Research Board 85th Annual Meeting.Washington,D.C.:TRB,2006:1056-1077.
[6]张雄希.无线传感器网络在城市智能公交系统中的应用[J].重庆交通大学学报:自然科学版,2009,28(6):1064-1066.Zhang Xiongxi.Application of wireless senor network to intelligent transportation system of city public bus[J].Journal of Chongqing Jiaotong University:Natural Science,2009,28(6):1064-1066.
[7]阎平凡,张长水.人工神经网络与模拟进化计算[M].北京:清华大学出版社,2000:78-96.
[8]Chien S,Ding Yuqing.Applications of Artificial Neural Networks in Predicting of Transit Arrival Times[C]//Annual Conference of ITS America Proceedings.Washington,D.C.:TRB,1999:859-870.
[9]Kalaputapu R,Demetsky M J.Modeling schedule deviations of buses using automatic vehicle-location data and artificial neural networks[J].Transportation Research Record,1995,1497:44-52.
[10]胡华.城市轨道交通与常规公交协调调度理论及方法[D].上海:同济大学,2010:63-68.
猜你喜欢
企业界(2024年8期)2024-07-05 10:59:04
公路与汽运(2024年1期)2024-03-07 03:02:06
河南科技(2023年1期)2023-02-11 12:17:04
Chinese Physics B(2022年5期)2022-05-16 07:10:38
云南画报(2021年11期)2022-01-18 03:15:34
今日农业(2021年19期)2022-01-12 06:16:32
环境保护与循环经济(2021年7期)2021-11-02 08:10:54
国外核新闻(2020年8期)2020-03-14 02:09:19
黑龙江交通科技(2020年5期)2020-01-13 18:01:35
铁道通信信号(2018年8期)2018-11-10 05:15:42
