
浅议1000MW机组送风机RB逻辑优化
2012-08-13 10:17黄声铭
重庆电力高等专科学校学报 2012年5期
黄声铭
(广东国华台山电厂,广东台山529228)
0 引言
广东台山电厂1000MW级机组锅炉为上海锅炉厂有限责任公司生产的3091t/h超超临界参数变压运行螺旋管圈直流炉,单炉膛塔式布置、四角切向燃烧、摆动喷嘴调温、平衡通风、全钢架悬吊结构、露天布置、采用机械刮板捞渣机固态排渣的锅炉。炉后尾部上部有单台SCR脱硝反应装置,下部布置两台转子直径为φ16370mm的三分仓容克式空气预热器。
风烟系统为平衡通风燃烧系统,配有二台动叶可调轴流式送风机、二台静叶可调轴流式引风机、二台动叶可调轴流式一次风机及二台离心密封风机,运行期间,空气正压送入炉膛,烟气负压排出炉膛。在送风机后、空预器前冷风管上没有安装联络风道,空预器出口设有平衡入炉二次风压的联络风道;在引风机入口、电除尘出口烟气管道没有安装联络风道,尾部烟气经空预器、除尘器后送至引风机烟道。
机组快速切负荷RUNBACK(简称RB)功能,是指在汽机及锅炉侧重要辅机发生故障而跳闸的情况下机组快速降低负荷以适应机组出力的需要、确保安全稳定运行的一种手段。
机组共设有磨煤机RB、送风机RB、引风机RB、一次风机RB、空预器RB、给水泵RB和停机不停炉RB共7种RB功能。
1 送风机概况
1.1 送风机RB逻辑设计
RB逻辑主要包括RB信号产生回路、负荷变化回路、RB速率回路、RB动作回路和RB复位等。
1.1.1 RB触发条件
负荷大于500MW时,给水控制投自动,RB功能才有效。
1.1.2 负荷变化
两台送风机运行时,一台送风机跳闸,RB动作,锅炉主控输出降至50%左右,RB目标负荷降至500MW,负荷变化率1000MW/min。
1.1.3 联锁及超驰动作过程
锅炉主控切换至手动跟踪状态,跟踪RB指令;停止热值校正;RB后,关减温水调节门;引风机静叶超驰开到75%再自动参与调节,其静叶上限为85%;送风机动叶超驰开到85%再自动参与调节,其动叶上限为90%。
1.1.4 FSSS跳磨顺序
送风机跳闸RB工况发生后,B磨煤机运行时,磨煤机跳闸顺序为:A-F-E,最终保留三台磨煤机运行;B磨煤机不运行时,磨煤机跳闸顺序为:AC,最终保留三台磨煤机运行。跳闸磨煤机间隔时间为10s。
1.1.5 主汽压控制
RB动作时,锅炉主控切手动,汽机切换到压力调节方式,RB动作4秒内压力设定值跟踪实际压力,4秒后按滑压曲线滑压运行,压力下降的速率为1MPa/min。
1.1.6 RB复位方式
当实际功率与RB目标负荷差值小于2%时,RB自动复位;锅炉灭火复位RB;RB发生7分钟后,限速后主蒸汽压力设定值和滑压曲线压力设定值偏差小于0.2MPa。
1.2 送风机RB试验前准备工作
为了提高RB试验的成功率,在RB试验前需要对相关系统/设备的软、硬件方面的条件进行逐一确认,制定一旦试验失败所应该采取的应对策略。
(1)对协调控制系统和RB逻辑进行最终确认,包括对控制系统逻辑进行检查及修改,对相关信号定值进行核实及设置。
(2)对现场的变送器信号、位置反馈信号、设备状态信号进行检查确认,试验前确认对现场进行模拟的信号已全部恢复。
(3)确认辅机的性能及出力,送风机、引风机、一次风机出力与电流的对应关系,正确设置送风机、引风机、一次风机的最大出力限制,防止RB过程中因风机的电机过电流跳闸而触发MFT。
(4)确认模拟量调节性能,对模拟量调节控制回路进行必要的扰动试验,如为了防止炉膛压力波动过大,RB试验前,要进行较大幅值的炉膛压力扰动试验,保证炉膛压力调节回路的调节品质良好,确认炉膛压力保护已投入。
(5)制定运行人员手动进行干预的基本原则,防止给水流量低MFT、总风量低MFT、主汽温度或再热汽温大幅度波动引起汽轮机应力大跳闸、炉膛负压高或低MFT。
1.3 送风机RB成功标准
重要辅机故障跳闸而使机组出力受到限制时,锅炉主控输出自动按一定的速率减少,直到锅炉主控输出等于相应设备RB目标负荷的对应值。
(1)送风机RB触发后根据相应的RB目标负荷切除燃料。
(2)在没有人为干预的情况下,机组参数能够控制稳定,不会出现参数异常或危及机组安全的情况,经受住RB对机组自动控制系统性能和功能的强烈考验。
1.4 送风机RB常见问题及处理措施
送风机的跳闸不仅影响到运行侧风组的正常工作,给炉膛负压的调节带来风险,还会波及制粉系统的燃烧及主蒸汽温度的变化,因此需要有相应的应对措施来尽最大可能地维持机组的稳定运行。
(1)在运行的送、引风机喘振,将喘振风机的控制切至手动,手动降低其出力并使其不再喘振。
(2)磨煤机跳闸后燃烧不稳,投入适当油枪助燃,注意中间点温度的变化及趋势,防止超温。
(3)跳磨后一次风机喘振,磨煤机跳闸联锁关闭出口门致使一次风压大幅升高,及时对一次风压进行调整,保证热一次风压母管压力在适当范围内运行。
(4)炉膛压力波动超过±2000Pa,退出炉膛压力自动,手动恢复炉膛压力,注意风机电流不得超限和防止风机喘振。
(5)RB过程中中间点温度达到报警值,运行人员手动调整给水流量,如无法维持给水流量在跳闸值以上,可将机组转湿态运行。
(6)主汽温超过610℃或低于560℃,运行人员将给水控制切手动,手动恢复汽温。如主汽温度高,开启减温水调门时,应加强给水流量的监视,防止因减温水流量增大而造成省煤器前给水流量低。
(7)汽温10分钟内下降超过50℃,手动打闸汽轮机,防止应力大损坏汽轮机。
2 送风机RB试验
2.1 送风机RB试验过程
A送风机跳闸后,RB正常触发,引风机B超驰开到85%,造成电流高达1020A过流,运行将引风机切到手动,送风机和燃料主控自动联锁切到手动。燃料主控切手动后造成燃料停留在240t/h位置不再降低,但锅炉主控仍然继续按RB的目标降到50%,造成煤水静态失衡。给水系统的焓值控制在RB发生时是不参与调节的,完全依靠煤水的静态平衡来维持煤水比。由于煤水静态失衡,而焓值又不参与控制,最终造成锅炉中间点温度高而触发MFT。
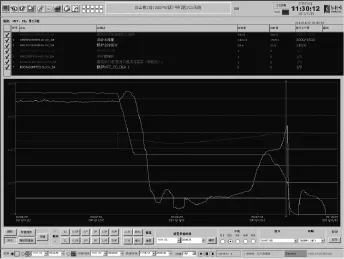
图1 送风机A的RB试验记录曲线
2.2 送风机RB过程中暴露出的问题
送风机跳闸后,机组的运行工况发生剧烈变化,主要的参数在调节过程中出现超调,最终导致机组MFT。
(1)送风机RB跳闸两台磨煤机后,发现一次风压偏高,一次风机有发生喘振的风险。
(2)RB过程中二次风箱压力调节手操器切强制手动,二次风箱压力需要手动进行调节。
(3)RB过程中,运行通过改变给水流量设定值偏置的方法干预给水控制,但由于干预的幅度较大、上下行频繁设置给水偏置,造成给水控制跟踪不上,产生大幅度的波动。RB时焓值调节器没有作用,调节器输出范围过窄,无法在异常工况下对给水流量进行有效的调节。
(4)引风机出力到达极限,炉膛压力保持正压。
(5)汽机跳闸,高旁减压阀快开后手动关闭,高旁阀后温度高过设定值,高旁减温水调节阀开大,而高旁减温水速关阀不开,此时在高旁减温水管道积有大量冷水,若此时打开高旁减压阀,因高旁减温水调节阀在较大开度,高旁减温水速关阀自动联开,将可能造成水冲击。
(6)机组RB期间,减温水调门闭锁开启,时间过长极容易造成超温。
(7)炉膛压力高或低时,送风机闭锁回路控制效果不明显。
(8)两台送风机自动退出后,燃料主控退自动,燃料量不能跟随燃料指令继续往下减,燃料量指令与燃料量偏差40t/h左右,而给水流量随锅炉主控指令继续减水,煤水失衡一段时间,中间点温度超温,等到发现时运行手动打掉两台磨干预已经来不及,MFT发水冷壁保护首出。
2.3 送风机RB导致机组跳闸过程分析
送风机RB触发MFT,从逻辑自动调节品质,风机最大出力,参数、定值设置,运行操作等方面进行分析。
(1)逻辑自动调节:观察过程曲线,B引风机退出自动联锁,退出B送风机自动,燃料主控联锁退出自动后,燃料量不再按预定燃料量指令减少煤量;RB过程中引风机开度达上限闭锁负荷增,闭锁焓值PID上下限输出,且焓值调节响应慢。
(2)超驰回路设计:送、引风机RB时,引风机的超驰回路设计不太合适,将超驰目标自动跟踪引风机的出力上限,没有区分动态超驰与稳态最大出力的区别,且超驰速率过快。超驰回路设计的初衷是为了解决被调量剧烈变化时,为防止PID的调节无法稳定,提前快速预判性进行部分单向调节,减轻随后PID正常调节的困难,达到快速稳定被调量的目的;因为超驰是单向开环调节,因此超驰目标的处理必须合理,超驰调节应避免被调量越限跳闸即可,随后的调节交给PID进行正常的闭环调节,切不可希望通过超驰调节使被调量一次到位。由于超驰目标的处理不合适、超驰速率过大,导致引风机大幅过电流,被迫退出负压自动及送风自动。
(3)参数、定值设置:B引风机超弛开度至85%,开速率3%/s,速率太快导致714A电流超限闭锁开信号没有起到作用。焓值校正输出上下限为±300t/h的给水流量,调节幅度太小且速率较慢,RB过程中失去调节作用。
(4)现场人员没有注意到煤量未减到预定目标值,而给水流量按照锅炉主控正常减少。当发现过热度迅速上升时进行加水干预,由于两台给水泵再循环阀自动开到50%影响到给水泵加水且焓值PID上下限闭锁焓值调节器输出,导致给水指令无法有效调节,最终导致分配集箱温度过高触发 MFT保护。
(5)由于汽机主汽调门过关,达到16%,影响给水泵加水能力。
3 送风机RB逻辑优化
通过送风机A的RB试验,MFT后对事故原因的分析及系统逻辑的讨论,对相关部分RB逻辑进行优化。
(1)为了防止一次风机喘振,当磨煤机停运关闭出口挡板时,一次风压力调节PID预关一定值,跳一台磨时预关一次风机动叶3%,两台磨预关6%,防止压力升高引起喘振。当热一次风母管压力大于13.5kPa时,闭锁一次风机动叶增,防止喘振。
(2)为了更好地控制二次风箱的压力,有利于锅炉的稳定燃烧及风量的控制,原逻辑修改为RB条件触发时二次风箱压力调节手操器不退自动。
(3)RB过程中给水控制跟踪不上运行的干预,造成给水控制的波动,除了干预不是很恰当外,主要原因是给水流量控制的流量信号有16秒的滤波,在RB过程以及大幅度频繁改变给水流量设定时,控制采用的给水流量信号严重滞后于实际的给水流量信号。为此,完善给水控制:RB时,给水流量调节用的给水流量信号的滤波时间由16秒自动改为3秒,使控制用的给水流量信号能够迅速反映实际给水流量的变化,便于给水控制的快速控制。RB结束后,自动恢复为16秒,不影响非RB工况下的给水控制;RB发生后,增加焓值调节前馈输出量校正回路,使RB过程中焓值控制参与给水的控制,维持煤水的平衡;RB发生后,自动将给水焓值调节器输出范围由±300t/h修改为±500t/h,便于焓值参与RB过程的给水控制,待RB结束后无扰切换为±300t/h。
(4)引风机超驰信号越限,指令变化速率过快,与风机的性能及出力不相吻合。引风机逻辑修改为:引风机RB超驰高限由85%改为75%,避免出现引风机过电流;送风机、引风机、空预器RB时,当炉膛压力高于300Pa,引风机电流小于714A,且相应引风机运行时,超驰指令以1.5%/s速率向目标值75%提升引风机出力,防止出现风机电流过流。
(5)高旁减温水的逻辑为高旁减温水速关阀跟踪高旁减压阀开度反馈,不与减温水调阀跟踪,当减压阀与减温水调阀不相匹配时容易造成水冲击。逻辑改为:高旁减温水速关阀跟踪高旁减温水调节阀反馈。
(6)RB至减温水门信号由长指令改为脉冲信号,RB动作后发30秒脉冲关减温水门,30秒后由运行人员手动操作。
(7)炉膛压力超过一定范围时,闭锁送风机向有可能进一步扩大超限范围的方向动作,在保证最低送风量的前提下,提高炉膛的负压安全系数,同时也可以降低引风机的出力。逻辑修改为:炉膛压力高于500Pa时,送风机动叶闭锁增;炉膛压力低于-500Pa时,送风机动叶闭锁减。
(8)为了防止类似的送风机手动后,燃料无法自动减少的情况发生。逻辑修改为:RB发生后,屏蔽燃料主控切至手动逻辑,让燃料量指令跟随锅炉主控变化;RB发生后25秒内,闭锁燃料调节器增加功能,防止燃料的反调作用。
4 送风机RB逻辑修改后的试验效果
通过对送风机RB试验失败的分析、送风机RB逻辑的优化,基于送、引风机没有联络挡板,且送、引风机RB过程及联锁动作结果一致,直接进行B引风机跳闸 RB试验。RB发生后,锅炉指令以1000MW/min的速率下降到500MW,实际给煤量由348t/h迅速下降到209t/h,给水流量由2708t/h迅速下降到1530t/h,A侧主汽温由597.5℃下降到573.7℃,B侧主汽温由597.7℃下降到573.7℃;A侧再热汽温由596.9℃下降到554.8℃,B侧再热汽温由 598.2℃下降到 556.3℃;炉膛压力最低 -271Pa,最高687Pa,引风机RB取得预期效果。
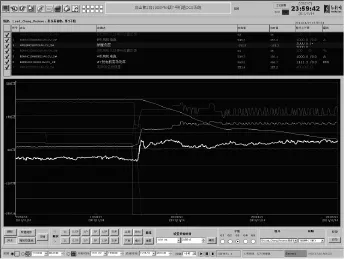
图2 引风机B的RB试验记录曲线
5 结束语
通过送风机RB试验,对RB控制回路进行优化调整,特别是对燃料及给水控制回路的优化,使得后续的RB试验得以成功。在RB过程中,各主要参数能够控制稳定;在没有人为干预的情况下,没有出现参数异常或危及机组安全的情况,为机组长周期安全稳定运行奠定了坚实基础。
[1]陈小强,伊峰,罗志浩.1000MW超超临界机组RUNBACK功能试验及其分析[J].浙江电力,2008,(1):23-26.
[2]火力机组启动验收性能试验导则[S].(1998年版).
[3]火电工程调整试运质量检验及评定标准[S].(1996年版).
[4]何洪流,黄如云.600MW机组变频调速风机RB功能应用[J].贵州电力技术,2012,(1).
猜你喜欢
江苏广播电视报·新教育(2022年1期)2022-05-15
电子乐园·下旬刊(2022年5期)2022-05-13
青海电力(2022年1期)2022-03-18
防爆电机(2020年6期)2020-12-14
防爆电机(2020年4期)2020-12-14
航空发动机(2020年1期)2020-06-13
文理导航·科普童话(2017年4期)2018-02-10
中国化肥信息(2017年12期)2017-02-10
中学生(2016年13期)2016-12-01
广西电力(2016年4期)2016-07-10
