诱饵诱偏条件下反辐射无人机攻击过程建模仿真分析
2012-08-10 06:16潘英锋
舰船电子对抗 2012年6期
潘 奎,潘英锋,陈 蓓,冷 毅
(1.空军预警学院,武汉430019;2.解放军95645部队,重庆430037)
0 引 言
反辐射无人机(ARUAV)是反辐射武器的一种,可以对敌方各种体制雷达进行攻击,是近年来无人机在电子战应用方面的发展重点[1]。它是在无人机上安装被动导引头和引信战斗部,通过导引头截获、识别、跟踪目标雷达,并实时检测与目标雷达的角度误差信号或视线角速度误差信号,形成控制指令,不断调整无人机的飞行姿态,修正制导误差,实现自动寻的,最终确保无人机准确地命中雷达目标[2]。随着ARUAV在现代战争中的广泛使用,对抗ARUAV攻击的方法不断创新。研究如何提高ARUAV的攻击效能就显得尤为重要。在研究ARUAV作战模型中,文献[3]针对采用附加辐射源对抗ARUAV的应用场合,建立了ARUAV的攻击运动模型。文献[4]根据电磁场理论、天线技术、ARUAV导引头测向和跟踪原理等基本理论,建立了ARUAV实施测向、跟踪、俯冲攻击等多个过程的动态仿真模型。但文献[3]~[4]建立的模型均忽略了ARUAV在运动过程中,导引头天线视场范围内辐射源变化情况对测向跟踪的影响这一重要因素。因为在末制导阶段,机体飞行姿态的变化和导引头天线指向的调整,有可能造成某些诱饵脱离导引头天线视场,导致测向结果跳变,引起无人机跟踪姿态较大调整,对无人机最终落点位置产生较大影响。本文基于采用比相体制导引头技术的ARU-AV,在综合考虑机体姿态和导引头天线指向因素对最终测向结果影响的基础上,建立了末制导阶段ARUAV攻击过程的动态模型。
1 几种坐标系及相互间变换关系
当反辐射导引头锁定目标辐射源后,ARUAV进入末制导阶段,末制导系统控制ARUAV完成攻击前姿态调整、攻击过程中引导、目标丢失后的拉起恢复或抗关机导引等任务。在雷达诱饵诱偏条件下,为了便于研究ARUAV的姿态角、飞行速度等变化情况,分析诱饵诱偏对ARUAV飞行路径的影响,首先要建立起地面坐标系、机体坐标系、天线坐标系和平动坐标系的数学模型和相互间坐标变换关系。
1.1 几种坐标系定义
1.1.1 地面坐标系O-XYZ
坐标原点O取地面雷达阵地处,OX轴在雷达水平面面内,向东为正方向,OY轴垂直于雷达水平面向上,OZ轴和OXY平面垂直,O-XYZ为右手直角坐标系,其中在地面坐标系中点的坐标表示为:
1.1.2 平动坐标系O-XdYdZd
其坐标原点O为机体质心,在机体飞行中,平动坐标系三坐标轴始终保持与地面坐标系三坐标轴平行,其中在平动坐标系中点的坐标表示为:
1.1.3 机体坐标系O-XmYmZm
坐标原点O取ARUAV机体质心。OXm轴与ARUAV纵对称轴一致,指向头部为正,OYm轴在ARUAV纵向对称面内,垂直于OXm轴,向上为正,OZm轴垂直于纵向对称面OXmYm平面,指向右翼,组成右手直角坐标系,其中在机体坐标系中点的坐标表示为:
1.1.4 天线坐标系O-XpYpZp
坐标原点O取天线中心即天线单元1处。OXp轴位于俯仰面天线子阵线上,指向长基线上天线单元为正,OYp轴垂直于天线阵面,向外为正,OZp轴位于俯仰面天线子阵线上,垂直于纵向对称面OXpYp平面,组成右手直角坐标系,其中在天线坐标系中点的坐标表示为:
1.2 ARUAV飞行姿态定义及角度关系
根据攻击条件的变化,考虑到反辐射无人攻击机采用常值稳定滚动通道,反辐射无人攻击机舵面相对零位的小偏角对攻击弹道特性的影响可忽略不计,在建立反辐射无人攻击机的弹道方程时,仅对其垂直和水平通道进行分析,并建立反辐射无人攻击机在垂直和水平平面的运动方程[5]。因此,确定无人机在空间的飞行姿态可以用俯仰角和偏航角来表示,其关系如图1所示,定义如下:ξ为ARUAV俯仰角,是指ARUAV的纵轴OXm与OXdZd平面的夹角,向上为正,反之为负;γ为ARUAV偏航角,是指ARUAV纵轴OXm在OXdZd平面的投影OXm与OXd轴的夹角,以OXd轴逆时针转至OX′m为正,反之为负。
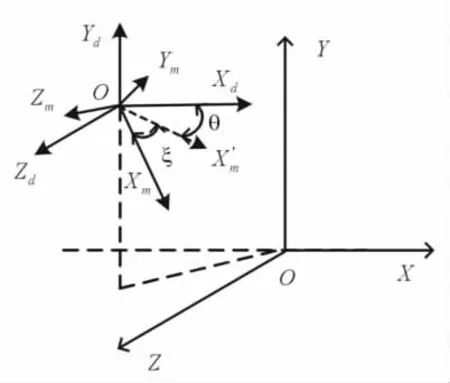
图1 无人机飞行方向示意图
1.3 目标方向角定义及关系
如图2所示,导引头天线阵中轴线和机体中轴线在水平面投影重合,根据目标在机体和天线坐标系中位置关系来确定目标方向角度定义及转换关系,定义如下:α为目标方位角,是指在大地坐标系的水平面上,目标相对于导引头天线阵中轴线的夹角,如图2中的α1和α2,当目标辐射源位于ARUAV中轴线左侧为负,反之为正;β为目标俯仰角,又称纵向角偏差,是指在大地坐标系的垂直面上,目标相对于导引头天线中轴线的夹角(如图2),当目标位于天线阵中轴线下侧时为负,反之为正;θ为导引头天线框架角,是指导引头天线阵中轴线与机体中轴线的夹角(如图2所示),天线阵中轴线位于机体中轴线下侧,定义框架角为负,反之为正;α′为侧向偏差角(如图2),是指在大地坐标系的水平面上,目标相对于机体中轴线的夹角,当目标辐射源位于ARUAV中轴线左侧时为负,反之为正,显然α′=α;β′为纵向偏差角,如图2,是指在大地坐标系的垂直面上,目标相对于机体中轴线的夹角,当目标位于天线阵中轴线下侧时为负,反之为正,显然β′=β+θ。

图2 比相体制导引头定位目标示意图
1.4 几种坐标系相互间变换关系
各坐标系间变换关系分析同文献[4],根据上述角度关系,可以得出各种坐标系间关系。
机体坐标系O-XmYmZm到平动坐标系O-XdYdZd之间旋转矩阵为:

天线坐标系O-XpYpZp到机体坐标系之间旋转矩阵为:

天线坐标系O-XpYpZp到平动坐标系O-XdYdZd之间旋转矩阵为:

平动坐标系O-XdYdZd到大地坐标系O-XYZ间的位移矩阵为:

式中:xk,yk,zk为 ARUAV在tk时刻位置坐标。
在实际建模中,可以确定各个辐射源在大地坐标系中的位置、无人机在大地坐标系中的位置、无人机的飞行方向和飞行姿态,导引头天线阵元在天线坐标系中的位置、导引头的框架角,通过上述坐标变换,便可将定义在不同天线坐标系下的目标变换到同一个坐标系下,从而可以方便分析计算。
2 ARUAV末制导阶段飞行过程建模
导引头识别和截获到目标后,进入末制导段。末制导段由调姿定位段和俯冲攻击段组成。首先按照一定的控制规律控制无人机完成水平调姿定位,当导引头框架角绝对值大于俯冲攻击门限值后,进入俯冲追踪阶段,而且在俯冲攻击阶段,ARUAV仍然根据导引头框架角信息和测角信息不停调整攻击姿态,最终以一定的命中角度攻击目标[6-7]。因此,末制导阶段是决定无人机攻击效果的关键阶段。
2.1 ARUAV末制导阶段飞行过程分析
由ARUAV制导控制原理可知,在末制导阶段,导引头天线按照自己的测向周期对目标实时进行测向并控制天线随动系统以控制天线转动,实现目标跟踪。同时,导引头每隔一定时间(即测向传输周期),向飞控制系统上传导引头天线实测数据和天线框架角信息,飞控制系统根据上一时刻无人机的位置和速度方向矢量,调整飞行姿态,修正瞄准误差,经过处理可以得到下一仿真时刻无人机的位置、速度方向矢量及天线指向。当导引头框架角大于70°时,无人机进入俯冲攻击阶段。
随着ARUAV与多诱饵诱偏系统的空间相对位置的变化,其攻击方向和导引头天线跟踪方向也将相应发生变化。当ARUAV飞行到一定位置,将有辐射源脱离导引头的视场,ARUAV又将跟踪视场范围内的剩余辐射源合成场相位或能量中心。因此,如图3所示,ARUAV的末制导过程实际上是跟踪多点源合成场到单点源的飞行过程。
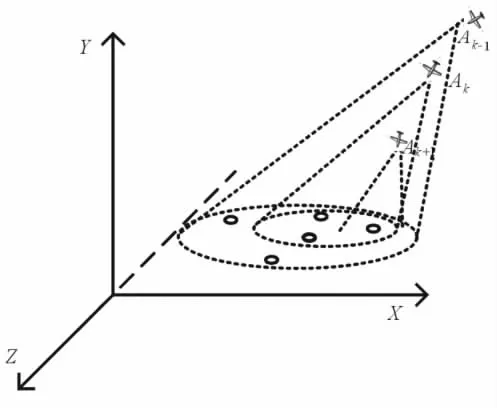
图3 辐射源脱离导引头天线视场示意图
ARUAV的运动过程相当复杂,对其进行精确的仿真将非常困难。为了讨论问题的方便,在对反辐射无人机运动过程进行模拟时,可采用图4所示的运动模型。

图4 ARUAV飞控模型示意图
设定ARUAV机体重心和天线阵中心处于同一点,对ARUAV的主要考查对象是无人机在每一时刻的位置、速度矢量,经飞控系统控制调整后下一时刻无人机的位置、速度矢量。为了考虑导引头天线视场内辐射源情况,还得考查每一时刻导引头天线的指向。由于ARUAV在末制导阶段的姿态调整中保持水平无倾斜转弯,因此,飞行姿态调整可以看着是沿着机体的横向和纵向做圆弧运动,如图5所示,其运动轨迹为横向和纵向运动的合成。通过迭代运算,可以仿真得到ARUAV的末制导飞行运动轨迹。
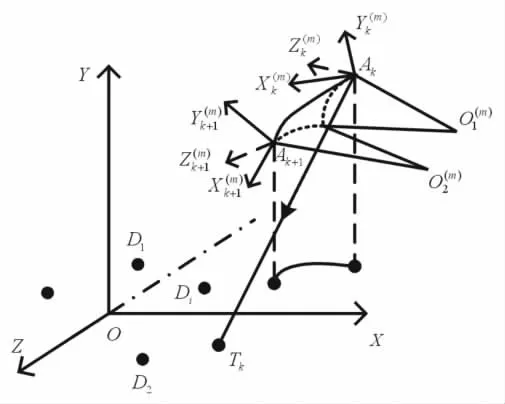
图5 无人机在飞行跟踪阶段飞行状态示意图
假设ARUAV导引头天线测向周期为Δt,上传飞控系统的传输周期为ΔT。无人机速度恒定为V,最大横向过载为nmax1,最大俯冲向下过载为nmax2,最大俯冲向上过载为nmax3,天线最大跟踪角速度ωmax,相比无人机自身过载而言,重力的影响较小,为了讨论问题的方便,忽略重力加速度。
在tk时 刻,ARUAV 位 置 为 Ak= [xk,yk,zk]T,飞行偏航角度为γk,飞行俯仰角度为ξk,天线框架角度为θk。在该时刻,导引头实际测得目标方位角度为αk,俯仰角度βk。则侧向偏差角度α′k=αk,纵向偏差角度β′k=βk+θk。无人机将根据该时刻测角偏差信息控制无人机姿态调整,经过ΔT,在tk+1时刻,ARUAV 飞行至处,飞行偏航角度为γk+1,飞行俯仰角度为ξk+1,天线框架角为θk+1,此时测得目标方位角度为αk+1,俯仰角度βk+1,侧向偏差角,纵向偏差角。根据解算出来的角偏差信号,控制ARUAV进行姿态调整,使机体和天线始终向对准目标的方向调整。当ΔT足够小时,所在方向可以作为ARUAV在Ak+1处的速度方向[8]。
在ΔT时间内,ARUAV横向和纵向能够转过的最大角度分别为[9]:

以tk时刻的机体坐标为参考,ARUAV横向调整情况可表示为图6所示情况[9]。

图6 ARUAV横向运动示意图
在ΔT时间内,ARUAV横向调整位移为:
在ΔT时间内,导引头天线始终按照自己的周期进行测向和天线跟踪。在测向周期Δt时间内,天线能够调整角度为:

以tk时刻的机体坐标为参考,ARUAV纵向调整情况如图7所示。

图7 ARUAV纵向运动示意图
同理,在ΔT时间内,ARUAV纵向调整位移为:
以tk时刻机体坐标为参考,ARUAV在ΔT时间段机体调整位移为:

综合上述推导,可以计算得出tk+1时刻ARUAV所在位置坐标:

进而,可以确定tk+1时刻飞行速度方向和天线的框架角分别为:
依此类推,可以得到在诱偏条件下无人机整个末制导阶段的飞行轨迹和最终落点。
2.2 辐射源分离条件的确定
ARUAV对多点源的攻击过程中,机体到辐射源的距离不断变化,飞行姿态和导引头天线指向都在不断调整,因此,导引头视场范围内的辐射源也时刻处于变化之中。当ARUAV足够远时,所有辐射源均处于导引头分辨角内,随着ARUAV不断接近辐射源,各辐射源相对于导引头天线阵中轴线的夹角不断变化,当某一个辐射源的夹角大于Δθ/2(导引头分辨角)时,该辐射源将脱离导引头的视场,在这一时刻不再对ARUAV产生诱偏,导引头测得的角度数据将是剩余辐射源的合成相位中心。因而,在研究ARUAV攻击多点源过程中,考虑导引头视场范围内的辐射源数量及变化情况显得尤为重要。
以天线坐标系为参考,假设在tk辐射源i在坐标中的坐标为,则


各辐射源达到临界位置条件是:

3 ARUAV攻击过程仿真
应用前面分析诱饵理论和推导的ARUAV攻击多点源诱偏系统的公式可对由雷达和附加诱饵源的有源诱骗系统攻击效果进行仿真。
图8为ARUAV入侵示意图,α为入侵角,即ARUAV入侵时飞行方向在大地坐标中投影与OX轴的夹角,以OX轴方向为准,右侧为正,反之为负。
假设诱饵信号始终“包裹”着雷达信号,采用前沿采样技术导引头只可能采样到诱饵信号[10],对其进行测频、测向和跟踪。假设ARUAV导引头视场角为60°,导引头基线长度为0.15cm,测向传输周期为50ms,飞行速度为80m/s(速度恒定),飞行高度为2 000m,横向机动过载为3g,俯仰过载5g,最大杀伤半径为30m。
(1)ARUAV对雷达和单诱饵的动态攻击过程

图8 ARUAV从固定高度入侵示意图
ARUAV起始入侵角分别为120°和180°。雷达位置坐标为:(0m,0m,-150m),诱饵的位置坐标为:(0m,0m,150m)。
如图9、图10所示,对于单点源,导引头天线调整能够稳定跟踪诱饵信号,引导ARUAV不断调整姿态指向诱饵,爆炸点为:(1.1m,0m,149.58m),(0.3m,0m,149.7m),诱饵被摧毁。由此可见,对于雷达配置单个诱饵,无人机均能有效摧毁诱饵,最终能够摧毁雷达。

图9 入侵角120°时攻击航迹图
(2)ARUAV对雷达和两诱饵动态攻击过程
设ARUAV分别从诱饵连线两侧向坐标原点入侵,入侵角分别为-150°和70°。雷达位置坐标为:(-2 6 0m,0m,0m),诱饵1的位置坐标为:(0m,0m,1 5 0m),诱饵2的位置坐标 为:(0m,0m,-150m)。

图10 入侵角180°时攻击航迹图
从理论上说,由于2个诱饵频率、功率、天线方向性均相同、发射的信号在时频域高度重叠,两诱饵的合成相位中心较为稳定且在两诱饵连线中点处。比相体制导引头无法分辨合成场中所含辐射源的数目,导引头天线阵元间的相位差将是诱饵信号在天线阵元处合成相位的差值,这时导引头测得方向是两诱饵的合成相位中心[11-13]。因此,ARUAV 的末制导阶段轨迹应向两诱饵中心处飞去,落点应位于2个诱饵的中间。但图10、图11所示的爆炸点分别为(-15.6,0,-37.1)和(3.5,0,77.7),并不是在诱饵连线中点(0,0,0)处,雷达和诱饵均安全。

图11 入侵角-150°时攻击航迹图
从图11、图12和表1可以看出,在两诱饵诱偏条件下,当ARUAV调整攻击姿态至某一位置时,其中有一诱饵将脱离导引头天线视场,导引头只对另一诱饵进行测向并引导ARUAV飞行姿态由指向诱饵1、2的中心向该诱饵位置调整,但由于高度和无人机自身机动性限制,当调整姿态到另一位置时,剩余诱饵也将脱离天线视场,无人机将按照此刻测向数据进行攻击,最终在爆炸高度允许范围内引爆。从表1数据可以看出,当无人机入侵方向不一样,诱饵分离顺序和位置不同,爆炸点位置也就不一样。当ARUAV从诱饵1一侧入侵,则诱饵2先脱离导引头天线视场,爆炸点位置接近诱饵1;当从诱饵2一侧入侵,则诱饵1先脱离导引头天线视场,爆炸点位置接近诱饵2;而且,最终两诱饵都将脱离天线视场范围。

图12 入侵角70°时攻击航迹图
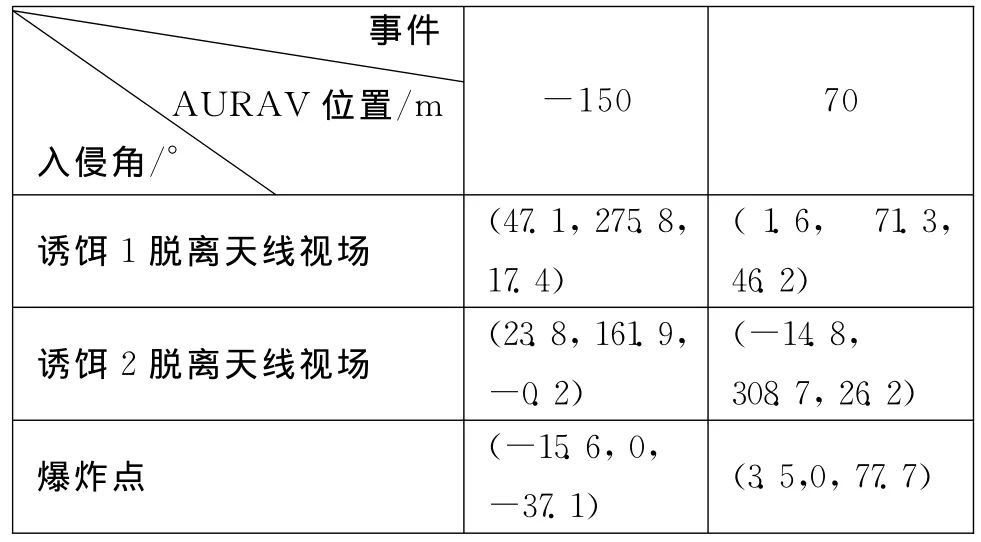
表1 两诱饵条件下ARUAV关键点位置数据列表
(3)ARUAV对雷达和三诱饵动态攻击过程
设ARUAV分别从诱饵1、2和2、3连线区域入侵,入侵角分别为-150°和120°。雷达位置坐标为:(-2 6 0m,0m,0m),诱饵1的位置坐标为:(0m,0m,1 5 0m),诱饵2的位置坐标为:(0m,0m,-150m),诱饵3的位置坐标为:(260m,0m,0m)。
三诱饵信号到达导引头各天线阵元的距离差不断变化,使导引头各天线阵元接收合成信号的相位差产生相应变化,导致测向结果也在不断改变,无人机不断调整飞行姿态,而在诱饵分离阶段无人机轨迹调整最为显著。从图13、14和表2可以看出:
(a)无人机从不同区域入侵,导引头可以搜索跟踪到三诱饵的合成信号,并能引导无人机跟踪到配诱饵雷达阵地上方,完成姿态调整和俯冲攻击。
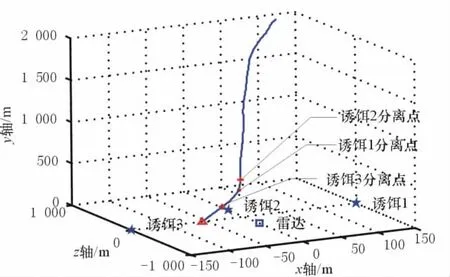
图13 入侵角-170°时攻击航迹图
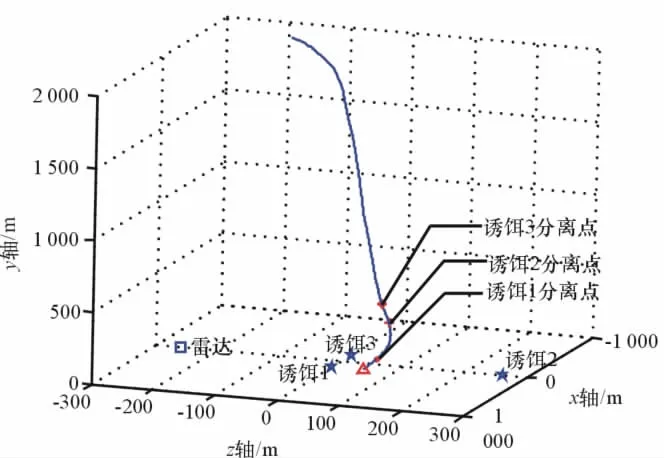
图14 入侵角70°时攻击航迹图
(b)无人机在俯冲攻击过程中,当运动到某一位置时,某一诱饵脱离导引头视场范围,此时导引头测得剩余两诱饵合成场方向,并引导无人机向两诱饵合成场中心方向攻击,尔后又将有一诱饵脱离导引头天线视场,导引头将测得最后剩下单诱饵的方向,并引导无人机向该诱饵方向攻击,最后该诱饵也将脱离导引头视场,无人机将按照在最后一个诱饵分离点处的测向数据,调整攻击姿态。由于距离太近加之无人机过载有限,最终在爆炸高度允许范围内引爆。
(c)从表2中的数据可以看出,在攻击配有3个相干诱饵的雷达过程中,当无人机入侵方向不一样,诱饵分离顺序和高度不同,最终爆炸点位置也在变化。因此,入侵方向对ARUAV最终爆炸点位置有着重要影响。
4 结束语
本文根据采用比相体制导引头技术的ARUAV测向跟踪飞行控制特点和相干诱饵的诱偏理论,运用坐标系及其相互之间的转换关系,建立了基于比相法测向技术的ARUAV在末制导阶段飞行模型,该模型充分考虑到了每一时刻无人机飞行姿态及导引头天线指向和天线视场范围内辐射源数量,并在诱饵诱偏条件下仿真了攻击运动轨迹。从仿真结果可以看出,导引头天线视场范围内辐射源数量变化情况与ARUAV入侵方向和初始姿态密切相关。因此,合理规划ARUAV入侵路径对提高无人机作战效能起着重要的作用。
[1]张乐平,俞志强.雷达抗反辐射无人机对策研究[J].舰船电子对抗,2002,25(6):3-6.
[2]李修和,陈永光,林春应.反辐射无人机的作战效能建模与仿真[J].军事运筹与系统工程,2003(3):24-19.
[3]戴幻尧.反辐射无人机毁伤辐射源仿真分析[J].电子信息对抗技术,2006,3(21):38-41.
[4]董文锋,刘泉,陈忠宽.ARUAV抗复杂电磁环境建模仿真研究[J].现代雷达,2011,33(3):73-77.
[5]黄长强,翁兴伟,姚淑微.反辐射无人攻击机过载参数分析[J].火力与指挥控制,2009,34(10):92-94.
[6]宋龙,任章.反辐射无人机末制导精度仿真研究[J].系统仿真学报,2005,17(3):533-537.
[7]项宗友.反辐射无人机制导系统仿真及飞行试验技术的研究[D].西安:西北工业大学,2002:6-20.
[8]周颖,李益民,马孝尊.反辐射武器——有源诱偏对抗建模仿真研究[J].系统仿真学报,2010:22(1):33-37.
[9]任刚强.雷达有源骗系统抗反辐射导弹攻击的分析[D].西安:西北工业大学,2005:50-53.
[10]吴世龙,罗景青.反辐射无人机在电子战中的应用及其效能分析[J].现代防御技术,2006,34(3):31-31.
[11]曲志昱,司锡才,谢纪岭.相干源诱偏下比相被动雷达导引头测角性能分析[J].系统工程与电子技术,2008,30(5):824-827.
[12]闵涛,姜文利.诱偏反辐射导弹三点源诱饵系统布站研究[J].航天电子对抗,2000(3):13-15.
[13]陈鑫,朱学平,彭杰.反辐射无人机抗前沿闪烁诱饵技术[J].电讯技术,2011,51(7):73-76.
猜你喜欢
现代电子技术(2022年18期)2022-09-17
无线电工程(2022年2期)2022-02-24
科学技术创新(2021年25期)2021-09-11
科技研究·理论版(2021年20期)2021-04-20
北京航空航天大学学报(2020年10期)2020-11-14
空军工程大学学报(2020年1期)2020-06-12
雷达学报(2018年5期)2018-12-05
雷达学报(2018年3期)2018-07-18
雷达学报(2017年1期)2017-05-17
火控雷达技术(2016年2期)2016-02-06