浮标通信的仿真与设计
2012-07-31 10:29张建忠秦建存
无线电通信技术 2012年5期
张建忠,秦建存
(中国电子科技集团公司第五十四研究所,河北石家庄050081)
0 引言
浮标通信是一种低仰角的海面移动无线通信,海上监测用的无人值守浮标将高清晰图像传到岸端。通常通信距离5~40 km,筏到岸间通信传输速率不低于8 Mb/s。浮标通信由于浮标体的原因,要求浮标端天线重量小挂高低,通信在抗浮标摇时传输可靠性高。浮标大容量远距离通信由于浮标体晃动和海面多径的影响,可靠传输的工程化设计是需要解决的难题,以前在浮标通信文献中没有分析过工作频率在浮标通信中的作用,本文首次从频率选择、天线工作方式方面对系统接收电平的影响进行了仿真分析与设计。
1 工作频率选择的分析
海面通信中由于海水的镜面反射作用,反射系数比较大,通常产生比较大的多径衰落,不同的极化方式海水反射系数不同。文献[1]中提出了反射系数的计算公式和海水的相应参数。反射系数为:


表1 典型介电常数和电导率关系
由于海面的相对平坦性和开阔性,海面电波传播必然产生多径影响,海面传播多径特性通常采用两径传播模型,如图1所示。

图1 海面电波传输两径模型
微波传输属于视距传输,在不考虑障碍物高度的情况下传输的距离(D)由接收和发射天线的高度决定。在大气折射指数最恶劣情况下:

式中,h1为发端天线挂高,单位为m;h2为收端天线挂高,单位为m。为保证浮标通信距离,在浮标端天线较低的情况下,岸端天线挂高要足够高,以满足视距传输。根据式(2)和浮标通信的工作环境,选取满足浮标通信的通信距离下相应的浮标端和岸端天线的高度进行仿真。

根据式(1)和图1,B点的总场强可表示为:

可以看出,不同的频率信号具有不同的合成场强,300 MHz信号的合成场强波动比较平稳但数值比较低,2 400 MHz信号的合成场强波动较大,但在15~40 km的范围内合成场强数值最大,而600 MHz和1 200 MHz信号合成场强则介于上述最高值和最低值之间。
为了扩展高频段理论分析,对比地给出1 200 MHz、2 400 MHz、4 800 MHz 和 8 600 MHz 信号的归一化合成场强仿真图,如图3所示。4 800 MHz和8 600 MHz频率信号的场强波动与2 400 MHz信号相比更大,而且其合成场强值在相应的大部分通信距离情况下也低于2 400 MHz和1 200 MHz频率信号的场强值。

图3 第2组频率在相应通信距离的归一化合成场强
为了清楚在岸端天线挂高不变的情况下,相同工作频率浮标端天线挂高变化时在相应通信距离上接收端归一化合成场强有何不同,对1 200 MHz和2 400 MHz 2个频率进行相应仿真,如图4所示。可见这个频段范围内浮标端天线挂高越高,基本上相应通信距离上接收端归一化合成场强值越大。也可以得出结论在浮标端天线挂高较低时,浮标端天线挂高对接收电平的大小有比较大的影响。
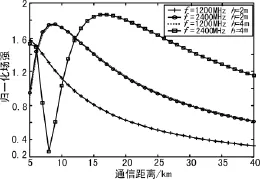
图4 在相应通信距离不同挂高下的归一化合成场强
2 天线工作方式的选择
浮标通信中海面移动通信系统天线是由浮标端天线和岸端天线组成。天线可以选择全向和定向2种工作方式,全向天线增益低但波束角宽便于跟踪,定向天线与之相反,选择全向天线时,天线的增益和波束角与频率无关。为了验证浮标通信海面传播频率特性的仿真结果,需要对天线工作方式进行分析与设计,在更符合实际情况下进行验证试验。
2.1 浮标端天线
根据文献[2],海平面的传输电波主要是直射波、反射波和表面波之和,天线挂高要满足最小挂高要求,在远距离通信中挂高越高越好。根据式(2)和浮标通信的特征要求以及图4的仿真结果,选择浮标端天线满足相应频率下海平面的最小挂高要求,并尽量挂高。
由于浮标体自身要求天线重量小的原因,首先选择天线为下面计算的低增益全向天线,而不考虑具有陀螺稳定平台的全向天线。海面通信条件下通常浮标体水平摇摆最大3 600,最大俯仰摇摆角度接近 ±20°。
全向天线的增益:

式中,k可以在27 000~42 000之间取值,通常取32 000,H为水平面角度,V为垂直面角度。
通常H取3600,V取400,通过式(4)得到:G=3.5 dBi,为了满足浮标体最大摇摆角度时不出现信号电平的剧烈衰落,并使系统保持最大的电平储备,取全向天线增益接近3.5 dBi这个值。
文献[1]指出在移动通信中经常使用垂直极化天线,文献[3]中指出当天线高度大于1个波长,以及入射角与反射波夹角很小时,垂直极化和水平极化对传播特性的影响可以忽略不计,故此浮标端天线采用垂直极化方式,岸端天线极化与浮标端天线极化方式保持一致。
2.2 岸端天线
岸端天线采用抛物面栅格天线,栅格天线保证海边工作的抗风性能。文献[4]中给出了抛物面天线的增益和天线波束角计算公式。
对于抛物面天线,天线增益公式为:

式中,d为天线直径(m),f为工作频率(MHz),k为天线工作效率(通常为0.5 ~0.7)。
天线波束角为:

式中,λ为工作波长(m),D为天线直径(m)。当选择1 200~2 000 MHz频段时,要适当选择岸端天线的直径,达到既保证系统的电平储备又保证波束角不至于过窄,从而不影响跟踪效果和抗风能力。由于浮标体移动速度不快,天线跟踪采用GPS位置跟踪方式和接收电平最大值结合方式,浮标端发射的气象数据信息中包含浮标端GPS测得的位置信息。岸端由于位置固定,根据文献[5]岸端天线控制设备可计算出天线的对准方位,控制岸端天线按照方位自动跟踪筏体的移动,并根据接收电平天线进行微调,从而可保证天线的对准精度,实现对浮标良好的跟踪。
3 工作频率对接收电平影响的实际测试
浮标端天线采用全向天线其波束角和增益已经确定,而岸端天线的增益和空间损耗与频率的关系均是20log关系,所以在天线尺寸、发射功率完全相同并且稳定跟踪的情况下不同频率的接收电平的趋势应该是与图2相一致的。
在实际海面测试中测试了UHF 4组频率的实际接收电平,在发射功率、筏上全向天线增益、极化方式和岸上定向抛物面天线直径完全相同时,在5~40 km之间相同距离情况下,4组频率设备的接收电平很好地符合理论仿真的结果。
4 结束语
根据上面的仿真方法和研究结果,选择1 000~2 000 MHz这一频段。利用上述天线工作方式在所选择的频率完成了40 km以内的8 Mb/s传输速率的海面移动通信测试,3次全程移动测试误码小于5×10-7,能很好地完成了图像传输试验。
该频段比300 MHz频段在10~40 km之间接收电平高10 dBm左右,误码特性高一个量级。
本次仿真的结论和方法对浮标通信的设计有借鉴指导作用,也适用于更多海面移动通信的应用场合。
[1]张玉艳,于翠波.移动通信[M].北京:人民邮电出版社,2010:38-40.
[2]李海涛.天线在浮标通信中的应用分析[J].计算机与网络,2005,31(19):58 -59.
[3]卢尔瑞,孙孺石,丁怀元.移动通信工程[M].北京:人民邮电出版社,1998:222-223.
[4]姚言,梅顺良,高葆新.数字微波中继通信系统[M].北京:人民邮电出版社,1998:394-399.
[5]李海涛.微波定向天线对准实现方法[J].无线电工程,2011,41(3):44 -46.
猜你喜欢
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
舰船电子工程(2021年5期)2021-06-04
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21
河北理科教学研究(2020年1期)2020-07-24
铁道通信信号(2019年6期)2019-10-08
垂钓(2019年2期)2019-09-10
铁道通信信号(2018年3期)2018-04-19
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年5期)2016-04-22