
利用单台测量机器人进行隧道网络监测
2012-07-26 08:04王宇会李锦城
铁道建筑 2012年2期
王宇会,余 旭,李锦城
(广东工业大学 土木与交通工程学院,广东 广州 510006)
随着我国轨道交通的发展、地下空间的开发,使得隧道监测的工作越来越艰巨,目前常用的进行隧道监测方法有:①收敛计法:该方法是一种传统的进行收敛监测的方法,它具有精度高成本低的特点,但是不能反映隧道围岩的三维变形信息,而且对于大断面隧道操作不便[1-2];②单台测量机器人实时差分监测:该方法可以在无人值守的情况下自动进行观测、实时进行数据处理、数据分析、报表输出及提供图形等[3],但是监测范围较小,由于只有一台全站仪,且设站位置固定,无法组网测量,要达到亚毫米级精度必须采用合理的测量方案和数据处理的方法[4];③多台测量机器人网络监测:该方法将动态基准测量和变形点组织为一个整体,实现了基准测量和变形监测的自动化,且自动化精度高,适合于较大变形区域的监测[5],但是成本较高。系统建立之后,从监测开始至监测结束,只服务于一项工程。本文根据隧道监测的特点提出了利用单台全站仪进行网络监测的方法,该方法可以在需要的时候进行观测,观测周期随意,并且适用于任意形状的隧道,仪器在两期观测之间还可以服务于其它的工程。
1 监测网络的建立
1.1 基准网的构建
如图1所示基准网的两端是隧道外的控制点,中间的参考点由监测断面上的变形点构成,在其上方安置圆棱镜,以便在不同的测站上都可以对其进行观测;测站点的位置可以选择在隧道中心线上,也可以选择在隧道的侧壁上用强制对中的方式来安置。
1.2 监测点的设置
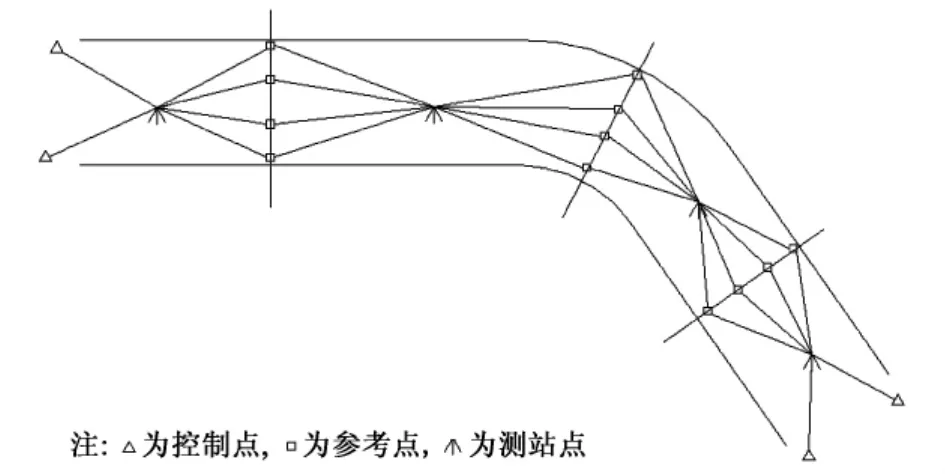
图1 基准网的建立
首先按照监测等级确定监测断面,在监测断面上确定监测点的位置(见图2)。在监测点上安置正对测站点的棱镜,为保证监测质量,测站点至参考点之间的监测点均在该测站进行观测,即保证每一测站观测的监测点的距离均小于等于测站点至参考点的距离。

图2 监测点的布置
在布设监测点、参考点和选择测站点的时候,应注意避免望远镜的视场内出现两个或两个以上的棱镜,否则仪器在进行观测时,会出现错误代码 AUT_RC_MULTIPLE_TARGETS,使得程序无法正常运行或搜索到错误的棱镜[6]。
2 系统软件的构成
系统软件主要由三部分构成:观测部分、数据处理部分以及数据管理与输出部分。
2.1 观测软件
观测软件用来对所有的参考点和变形点进行观测,其实质是在GeoCOM控制下的全自动观测。该部分需要处理的关键模块有:
2.1.1 监测控制模块
观测前的准备:在进行监测之前,在所有的测站点上对该测站上的所有参考点和变形点进行观测,并将观测信息存入数据库中(一个测站一个数据表)作为以后每期监测的控制文件(见图3)。

图3 一个测站的观测
为尽量减少时间,在进行每一期监测时,安置好仪器之后,该模块会提示输入测站点号,并提示照准该测站一个观测点输入其点名,之后软件会自动寻找到该测站的观测信息数据表,以控制仪器寻找到所要观测的所有点。之后软件控制测量机器人按照测量规范或用户设置的要求进行观测。
2.1.2 重测和补测模块
该模块主要解决对GeoCOM返回代码不正常(不是RC_OK)的方向进行补测和对没有达到限差要求的数据进行重测的问题。
GeoCOM的每一条指令的返回值用以表明该指令的实行情况:当返回值是RC_OK时,表明指令被顺利执行,观测数据有效;当返回值不是 RC_OK时,需要分情况区别对待(如:返回值是RC_TIME_OUT时表明通讯超时,应重新设置通讯超时时间。返回值为ANG_BAD_ACC时表明测角精度达不到要求,应重新进行观测),以保障后续的观测能够正常进行。
在每一站观测结束之后,软件会按照用户设置的观测限差或观测等级的要求对数据进行检验,对于精度没有达到要求的方向,软件会按照规范要求进行重测,对于重测3次仍不能满足要求的方向,提示给用户,采用人工照准的方式进行测量。
2.2 数据处理模块
数据处理过程主要分为两部分:参考点数据的解算、变形量的计算。
2.2.1 参考点坐标的解算
由隧道外的控制点、测站点和参考点构成了隧道内的控制网。其中隧道外的控制点是已知点,测站点和参考点是待求点。对该控制网的解算采用间接平差的方法[7]。首先求出待测点的坐标:①由隧道一端的控制点,按照自由设站的方法解算出测站点的坐标;②由测站点的坐标按照极坐标的方法计算参考点的坐标;③如此类推,直至最后一个测站。将上述所有点的坐标作为该点的坐标初始值。
然后列立误差方程,组成法方程,最后求解各点的坐标。
2.2.2 变形点坐标的计算
在一个测站上的观测,相当于一个单台全站仪的全自动变形监测系统,而且在隧道中气象条件相差不大,很适合多重差分技术的应用。所以在计算出参考点和测站点的坐标之后,利用多重差分技术[8]在各测站分别计算该测站点观测的变形点的坐标。
2.3 数据的管理与输出
为方便检索、存储及输出,系统采用数据库来管理各项数据。数据库主要有两个:控制文件数据库和成果数据库。其中控制文件数据库中的数据表的个数与测站点数相同,一个数据表用于存储一个测站的信息(包括参考点和变形点位置数据),用以在观测时控制仪器寻找目标。成果数据库包含两个数据表,一个数据表用来存储观测数据(包括水平度盘读数、竖直度盘读数、斜距等),另一个数据表用以存储坐标及变形信息(包括坐标、本期位移及总体位移等)。
数据库管理软件可以提供用户查询数据、用曲线图形显示变形信息以及报表的输出功能。
3 系统在隧道变形监测中的应用
某地铁出口有一条“L”形的过街隧道,该隧道所处区域是一个大面积的正在施工的场地,在该隧道进行支护之后,由于周围其他构筑物的施工需要对其进行监测。由于在“L”形的隧道中,采用1台全站仪1个测站无法观测到所有的点,另外监测的周期又与施工的进度有很大的关系,于是选择了利用单台全站仪网络监测的方法。
3.1 监测网的设置
隧道的两个洞口分别有3个控制点,在整个隧道共布置监测断面25个,每个断面有12个点,每隔6~9个断面设置一个测站点,测站点用钢架固定在隧道壁上,仪器采用强制对中的方式。在两个测站中间的断面上选择3~5个通视条件较好的点作为参考点,其上安置360°Leica圆棱镜,其余点上安置普通棱镜。
监测点和参考点的编号按照6位数字进行,其中前三个字符表示所在断面的编号,后三位数字表示监测点的编号,后三位数字中第一个字符为“0”或“1”,用于区分参考点和监测点,其中“1”表示参考点,“0”表示监测点,后两个字符用于表示监测点的点号。如点“001008”表示该点是在第一个断面上的第八个监测点;“005101”表示该点是在第五个断面上的第一个参考点。
3.2 系统的运行
系统利用一台Leica TCA1800、一个笔记本电脑进行观测。从第一期观测开始,每期需要进行观测时,将仪器搬至变形区与笔记本电脑相连,运行监测软件进行观测。一个测站的观测结束之后,人工将仪器搬至下一测站,直至另一端。全部观测结束后,系统自动进行数据的解算、报表的输出。
监测频率一般为每天4次,施工进度较快时,每天观测的次数稍微有所增加;施工进度比较慢时,每天观测的次数略微有所减少,直至外围所有工程停止施工,监测周期逐步加大,直至隧道稳定。
整个监测过程一直持续到外部施工结束,并且隧道变形稳定,共计获得300多期观测数据。从这些数据中可以看出,最弱点的周期平均精度为1.0 mm,周期的最大点位误差为1.7 mm,其它点的周期平均精度0.7 mm,周期最大点位中误差1.5 mm,可以满足地下结构物变形监测的要求。
4 结论与建议
本监测系统继承了单台全站仪自动监测系统的优势,又扩大了其应用的范围,其优势与特点有:
1)系统采用了自动监测技术,每个测站的观测,均不需人工干预,仪器自动进行观测、自动记录、自动筛查数据、自动对不合格的数据进行重测或补测,实现了每个测站观测过程的自动化。
2)虽然测站点和参考点均在变形区域范围内,但是每次监测结束后,数据解算均采用洞口外的控制点作为已知数据,有效地防止了测站点位移和参考点不稳定对变形数据的影响。
3)在两个测站点之间的断面上选择参考点,利用该断面上的参考点对参考点与测站点之间的变形点进行差分计算,确保了参考点至测站点的距离不小于变形点至测站点的距离,有效地保证了变形点的监测精度[9]。
4)在监测周期比较长的时候,一台仪器在服务于该工程的同时,可以服务于其它的工程,大大提高了仪器的使用效率。
本变形监测系统的运行需要人工将仪器从第一个测站搬至最后一个测站,并进行每个测站的初始照准,虽然没有达到完全自动化,但是造价低,可以发挥仪器的最大效率,适合于任意形状的隧道监测,但是为防止观测过程中的误差积累,隧道的长度不宜过大。
[1] 刘绍棠,王志武.隧道围岩收敛监测方法及其特点[J].铁道建筑,2008(4):44-46.
[2] 张先军,王玉锁,叶跃忠.西格岭隧道施工监控量测技术研究[J].铁道建筑,2010(11):57-59.
[3] 包欢,徐忠阳,张良琚.自动变形监测系统在地铁结构变形监测中的应用[J].测绘学院学报,2003,20(2):103-105.
[4] 卫建东.基于测量机器人的自动变形监测系统[J].测绘通报,2006(12):41-44.
[5] 卫建东,包欢,徐忠阳,等.基于多台测量机器人的监测网络系统[J].测绘学院学报,2005,22(2):154-156.
[6] 王宇会,蒋利龙.测量机器人视场内多目标问题的研究[J].工程勘察,2011(1):84-86.
[7] 武汉大学测绘学院测量平差学科组.误差理论与测量平差基础[M].武汉:武汉大学出版社,2006.
[8] 包欢.差分方法在测量中的应用[J].测绘通报,2003(5):29-31.
[9] 徐忠阳,张良琚,包欢.自动极坐标实时差分监测系统及其在大坝外部变形监测中的应用[J].测绘通报,2001(9):28-30.
猜你喜欢
煤气与热力(2022年4期)2022-05-23
测绘地理信息(2022年2期)2022-04-02
水利水电科技进展(2021年6期)2022-01-07
陕西水利(2021年5期)2021-06-21
湖北农机化(2020年22期)2021-01-18
水电站设计(2020年4期)2020-07-16
全球定位系统(2020年1期)2020-03-31
精密制造与自动化(2018年1期)2018-04-12
江西建材(2018年4期)2018-04-10
自动化学报(2017年2期)2017-04-04
