基于Lambert转移的虚交点轨道拦截优化
2012-07-25 07:59:16魏鹏涛雷刚郭洪娜王明海
飞行力学 2012年6期
魏鹏涛,雷刚,郭洪娜,王明海
(1.第二炮兵工程大学906教研室,陕西西安 710025;2.中国人民解放军96656部队,北京 102208)
引言
美、俄等航天与军事强国在近三十多年来从未中断过轨道拦截卫星的研究与实验,空间拦截与交会技术已成为一个国家航天技术发展水平的重要标志[1]。轨道拦截是轨道机动的一种。常规的轨道拦截模式一般就是寻求一种时间最快,或者能量消耗最省的过渡轨道,将机动航天器的初始轨道和目标航天器的轨道连接起来,且当机动航天器从初始轨道经过渡轨道运行到和目标轨道的交会点,目标航天器也运行到交会点,即实现机动航天器和目标航天器的交会。基于冲量方式的轨道拦截,过渡轨道也是一条开普勒轨道。
本文提出了在虚交点进行拦截的轨道拦截方式,以达到时间最短、能量最省的要求。
1 虚交点拦截
1.1 数学模型建立
记轨道机动航天器和目标航天器所在轨道分别为初始轨道和目标轨道,轨道拦截就是在初始轨道上寻找一个变轨点T,在目标轨道上寻找一个交会点J,并在两点间设计一条拦截轨道L,要求机动航天器在t1时刻由T点实施轨道机动,然后沿拦截轨道运动到t2时刻与目标航天器交会于J点[2]。当交会点J确定,则目标航天器运行到拦截点的时间TH也就确定,即:

式中,MHJ为目标航天器在交会点J的平近点角;MH0为目标航天器初始时刻t0的平近点角;nH为目标航天器平均运动角速度。
首先定义两航天器的轨道不共面情况下的“虚交点”。因为绕地球运行的航天器的轨道面都过地心,两不共面的轨道在地球上投影时,就会有两个交点,且两交点与地心共线,即相位差π。定义在目标轨道上,目标先经过的虚交点为第1交点uH1,另外一个为第2交点uH2,两者通称虚交点。对应的机动航天器轨道上的虚交点分别记为uB1和uB2,如图1所示。
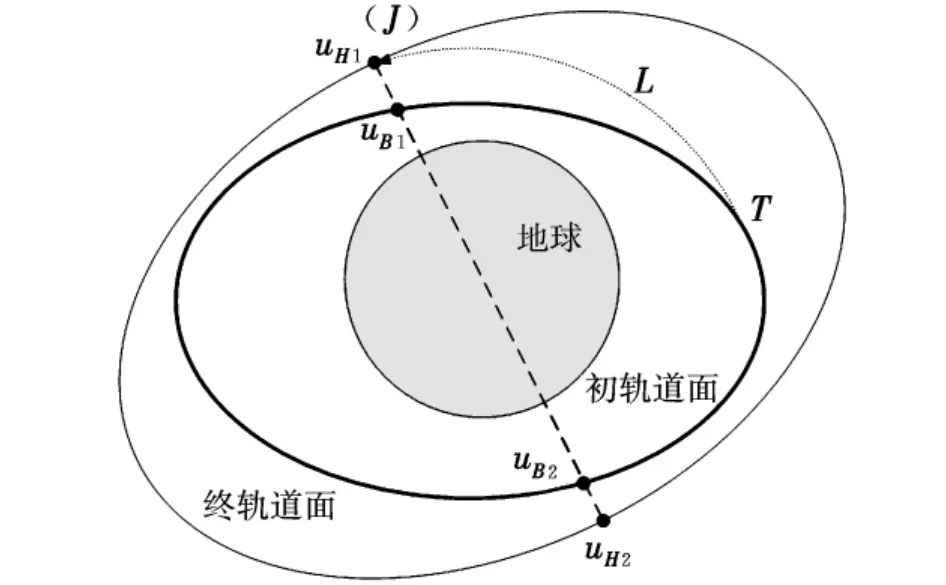
图1 虚交点拦截示意图
若推力是冲量式,即速度在变轨点T瞬时增加,则拦截轨道L是开普勒轨道,若变轨点T和交会点J都确定,则拦截轨道唯一,即固定时间拦截。则:

式中,MBT为机动航天器在变轨点T的平近点角;MB0为机动航天器初始时刻t0的平近点角;nB为机动航天器在初始轨道上的平均运动角速度;MIJ为机动航天器在拦截轨道上交会点J的平近点角;MIT为机动航天器在拦截轨道上变轨点T的平近点角;nI为目标航天器在拦截轨道上的平均运动角速度。
能量总消耗为:

式中,vIT为机动航天器在拦截轨道上变轨点T的速度矢量;vBT为机动航天器在初始轨道上变轨点T的速度矢量。
1.2 虚交点坐标系下的拦截问题
由于所选择拦截轨道和初始轨道在同一平面内,建立初始轨道下的近交点坐标系[3]如图2所示。
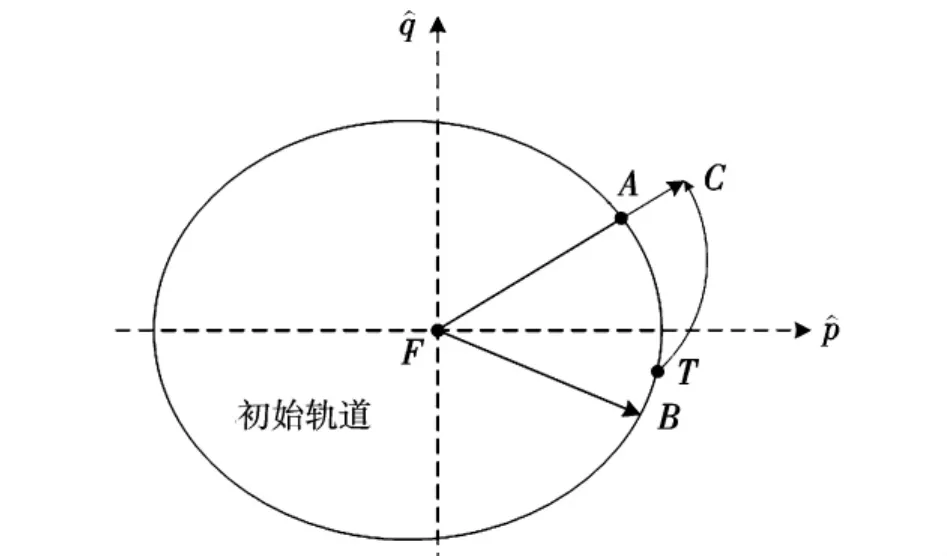
图2 近交点坐标系下的拦截轨道

1.3 虚交点的求取
将机动航天器轨道和目标航天器轨道投影到地球所在的球面上,如图3所示。虚交点可以用该点的纬度幅角u=ω+f表示,其大小只和两轨道的轨道倾角i、升交点赤经Ω有关。
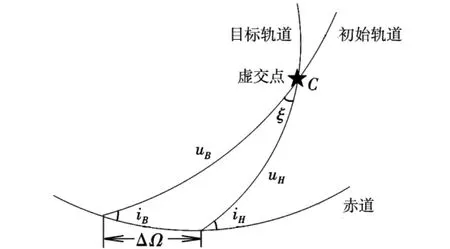
图3 虚交点与i,Ω的关系示意图
由球面三角形的相邻四元素公式得:
式中,下标B表示机动航天器初始轨道参数;下标H表示目标航天器轨道参数。可见只要保持两轨道轨道面不变化,虚交点的纬度幅角就保持不变。欲实现在虚交点对目标实现轨道拦截,调整机动航天器在虚交点的轨道高度即可。
2 应用普适变量法解决Lambert问题
求解Lambert问题可以归结为求解高斯问题,高斯问题是指:给定航天器所处轨道上的两个位置点1和2,其对应的位置矢量分别为r1和r2,以及卫星从点1运动到点2所经历的时间Δt和运动方向,求卫星在1,2两点的速度v1,v2[4-6]。
定义普适变量为:

可以得到航天器位置矢径的普适公式:

由式(5)、式(6)可得飞行时间的普适公式为:

式中,c0为积分常数;a,e分别为追踪航天器转移轨道的半长轴和偏心率。
利用普适变量和斯达姆夫函数[7-9]C(z)和S(z)所表示的拉格朗日系数如下:
斯达姆夫函数C(z)和S(z)为:
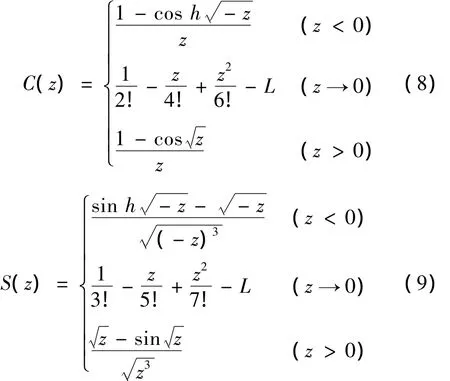
式中,z=α χ2,α=1/a,r1=|r1|,r2=|r2|。
追踪器始末位置矢量之间的真近点角为:

动量矩的根为:

设

令

由拉格朗日系数可得v1,v2表达式为:
3 仿真分析
假设初始轨道和目标轨道参数如表1所示。

表1 轨道参数
由表1可得第1虚交点纬度幅角为:uB=47.303 8°,uH=25.108 2°。选择初始轨道初始时刻后不同位置为变轨点,需要的速度冲量如图4所示。

图4 不同变轨点进行轨道转移需要的速度冲量
由图4分析可知,对于在同一虚交点拦截并且拦截时间一定的情况下,在初始时刻进行拦截最省能量。因此,应该在初始时刻进行变轨,从而在第1虚交点对目标进行拦截。优化拦截轨道参数如下:长半轴7 020.63 km;偏心率0.18;轨道倾角30°;升交点赤经30°;近地点幅角230.565 1°;真近点角109.434 9°。在第1虚交点实现轨道拦截所需速度增量为1.417 6 km/s,拦截时间为1 403.412 3 s。利用STK可视化仿真,可得到拦截的过程仿真如图5所示。

图5 拦截过程仿真
从以上仿真可以看出,采用虚交点方式可以有效地对目标进行拦截。
4 结束语
针对轨道异面拦截需要较大的速度冲量,本文提出了基于虚交点的轨道拦截方法,拦截轨道和初始轨道在一个平面上,有助于节省能量。并以空间机动拦截某一目标为例,仿真了此算法的可行性。对于固定时间拦截问题,可以选择合适的变轨点,以较小的能量实现对目标的拦截。
[1]王会利.空间作战拦截轨道设计与优化[D].西安:西北工业大学,2007.
[2]徐晓静.有限推力下航天器轨道机动的最优控制研究[D].北京:装备指挥技术学院,2006.
[3]Howard D C.轨道力学[M].周建华,徐波,冯全胜,等译.北京:科学出版社,2009.
[4]李生猛,朱战霞.基于Lambert理论的多脉冲快速轨道交会研究[J].计算机仿真,2009,26(11):80-83.
[5]梁新刚,杨涤.有限推力下时间最优轨道转移[J].航天控制,2007,25(1):46-51.
[6]林琪,来嘉哲.空间交会对接仿真技术研究[J].装备指挥技术学院学报,2008,19(5):53-57.
[7]林来兴.空间交会对接技术[M].北京:国防工业出版社,1995:4-6.
[8]宋旭民,陈勇.基于多圈Lambert转移的空间交会方法研究[J].装备指挥技术学院学报,2010,21(3):67-70.
[9]竺苗龙,竺致文,竺雪君.绕地飞行航天器最佳发射轨道理论及其他问题的研究[M].北京:中国宇航出版社,2011.
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:06
当代水产(2022年3期)2022-04-26 14:27:18
当代水产(2019年1期)2019-05-16 02:41:10
太空探索(2016年12期)2016-07-18 11:13:43
太空探索(2016年9期)2016-07-12 09:59:53
新高考·高一物理(2016年3期)2016-05-18 15:59:10
新高考·高一物理(2016年3期)2016-05-18 02:56:46
深空探测学报(2016年2期)2016-05-17 05:19:19
物理通报(2011年8期)2011-01-24 07:39:38
空间控制技术与应用(2010年5期)2010-12-23 08:05:16