
GPS/GLONASS组合静态相位相对定位算法
2012-07-25 05:13:20段举举沈云中
测绘学报 2012年6期
段举举,沈云中,2
1.同济大学 测绘与地理信息学院,上海 200092;2.同济大学 空间信息科学及可持续发展应用中心,上海 200092
1 引 言
GLONASS预计将在2011年年底达到满星座运行状态。GPS/GLONASS组合定位,可以成倍地提高卫星可用数量,改善卫星几何分布,提高卫星导航定位的可用性、可靠性、精确性及系统的自主完备性,弥补单一系统在某些情况下无法定位的缺陷。因此,GPS/GLONASS组合定位具有重要的应用前景。
GPS采用码分多址(CDMA)的方式调制卫星信号,所有卫星的频率相同;而GLONASS采用频分多址(FDMA)的方式调制卫星信号,不同卫星的频率不同,因此,所有涉及两颗GLONSS卫星观测值组合的问题都要比GPS复杂。例如,GLONASS双差观测值模糊度不能直接采用已有的GPS双差处理方法进行解算。在以周为单位的GLONASS双差观测方程中,无法消除接收机钟相对偏差的影响;在以距离为单位的双差观测方程中,不能构成GPS那样的双差模糊度。第1种情况可以先根据伪距单差求出接收机相对钟差,然后再固定双差模糊度[1-3],但对伪距精度要求较高,一般的伪距测量精度无法满足要求。第2种情况将GLONASS双差观测方程的模糊度分解成参考卫星的单差模糊度和双差模糊度,先根据伪距求出参考卫星的单差模糊度,然后进行基线解算[4-6],但是如果参考卫星的单差模糊度解算结果不准确,会引入一个系统性偏差。文献[7]提出先根据参考卫星的单差模糊度来固定双差模糊度,再根据固定后的双差模糊求参考卫星单差模糊度的整数解[8],然后进行基线解算,这样计算显得非常繁琐,也增加了计算工作量。组合定位时,由于涉及两种类型的观测值,需要合理确定二者的权比[9-13]。
本文将GLONASS参考卫星的单差模糊度按实参数,双差模糊度按整参数进行估计,并将方差分量估计用于确定GPS和GLONASS观测值的权比,通过算例对GPS/GLONASS组合静态相对定位的结果进行分析。
2 时间与坐标系统的统一
GPS采用GPST,以UTC(USNO)为时间度量基准,GLONASS采用GLONASST,以 UTC(SU)为时间度量基准。GPST与UTC相差为整数跳秒,GLONASST与UTC相差3h,需要进行时间的转换。但在实测的GLONASS星历文件(G文件)中,采用的时间系统并非GLONASST,而是UTC,故在与GPS组合定位的数据处理中,两者之间只相差一个整数跳秒[14]。
GPS采用 WGS-84坐标系,GLONASS采用PZ-90坐标系,在数据处理时要进行坐标系统的转换。据文献[15]介绍,GLONASS坐标系统于2007年由PZ-90更新到PZ90.02,与ITRF差异保持在分米量级,PZ90.02与ITRF2000的差异只有原点平移,在X、Y、Z方向分别为:-36cm、+8cm、+18cm。而 WGS-84与ITRF2000差异很小,其误差可以忽略。因此,本文只考虑PZ90.02与WGS-84之间的平移参数。
3 GPS/GLONASS组合静态相位相对定位模型
假设参考站r、流动站u在某一历元同时对GPS卫星i、m和GLONASS卫星j、n进行观测,卫星i和j是参考卫星,则可得GPS、GLONASS的载波相位双差观测方程分别为

以距离为单位,式(1)与式(2)可表示为

由上式可知,载波相位双差观测方程消除了卫星钟差,减弱了卫星星历误差、对流层和电离层延迟误差的影响。GPS的双差观测值也消除了接收机钟差的影响,而GLONASS的双差观测方程,由于不同卫星采用不同的频率,接收机钟差无法消除,其双差模糊度不具有整周特性,因此GLONASS双差观测值的模糊度处理要比GPS复杂得多。
需要说明的是,在上式中,GPS和GLONASS各选了一颗参考卫星,组成的是单系统双差。实际上,也可以选择一颗GPS或GLONASS卫星作为参考卫星,组成双系统双差,双系统卫星双差较单系统卫星双差多形成一个观测方程,更加充分地利用观测值。但系统间差分时,如果系统间系统误差处理不好,反而会降低定位结果的精度[16]。因此,组合定位通常采用系统内差分,提高定位精度。
对定位结果的精度评定采用如下方法进行计算,单位权中误差估值为

式中,V为观测值的残差;P为权矩阵;t为未知参数个数;n为观测值总数。
基线向量中任一分量的精度估值为

式中,Qxx为未知数x的协因数元素。
4 GPS/GLONASS组合静态相位相对定位关键问题
4.1 GPS/GLONASS模糊度解算
对于GPS卫星,站星双差可以消除接收机钟差,且双差模糊度保持整数特性。GPS模糊度解算采用文献[17—18]提出的 LAMBDA(least-square ambiguity decorrelation adjustment)方法。
对于GLONASS卫星以周为单位的观测方程式(2),由于残余钟差的影响,破坏了双差模糊度的整数特性。如果利用伪距计算残余钟差,要使钟差误差引起的GLONASS双差模糊度的误差小于0.1周,则对应于7.31MHz的最大载波频率差,残余钟差的精度要求达到1.37×10-8s,一般GLONASS接收机无法满足这一要求。
以距离为单位的双差观测方程式(4),尽管没有接收机残余钟差项,但不同GLONASS卫星的频率不一样,不能形成类似于GPS的双差模糊度,需要对式(4)的模糊度项变换如下[4-8]

式中,Δλnj=λn-λj,则式(4)可表示为



表1 不同卫星组合所允许的单差模糊度精度(L1)Tab.1 Single difference ambiguity of different combination(L1)
由表1可知,当对波长之差最大的两颗GLONASS卫星求双差时,单差模糊度的最大允许误差为23周,若根据伪距和相位的关系用下式进行计算

考虑到其他误差的影响,假设P码的精度为1m,载波相位的精度为0.1周,而GLONASS的最小波长为18.67cm,根据误差传播定律公式

可得到单差模糊度的精度约为8周,多个历元的单差模糊度取平均,可进一步提高精度,完全能满足固定双差模糊度的要求。而且,单差模糊度只需按实参数估计,而双差模糊度必须按整数进行求解。
4.2 GPS/GLONASS的方差分量估计
GPS/GLONASS组合定位时,由于涉及两个系统的观测值,需要合理确定两者的权。文献[19]用单历元观测值进行方差分量估计定权,但是单历元多余观测数太少,因此其估值不可靠。本文根据GPS/GLONASS一个时段的所有观测数据进行方差分量估计,确定两类观测值之间的权比[9]。
确定不同类观测值的权通常采用方差分量估计。常用的方法有Helmert估计法、最小范数二次无偏估计法(MINQUE)等,理论上,当不同类观测值不相关时,这两种方法是等价的。本文采用Helmert估计法估计两类观测值之间的权比。
GPS、GLONASS的Helmert方差分量估计过程如下[20]:
(1)第一次最小二乘平差时,根据经验给GPS、GLONASS观测值先验定权P1、P2。
(3)按下式进行方差分量估计


(4)按下式重新定权

式中,c为任意常数,一般取中的某一个值。
5 试验结果与精度分析
以某工程GPS控制网为例,共37条基线,组成24个最小独立闭合环,基线边长207m~2189m,基线观测时间均大于60min,观测数据类型有C1、P1、P2、L1和L2。
采用以下3种方案进行基线解算,并计算最小独立环闭合差和基线精度,分别用来评定3种方案的外符合精度和内符合精度。
方案1:GPS静态相对定位。
方案2:GLONASS静态相对定位。
方案3:GPS/GLONASS方差分量估计静态相对定位。
图1为3种方案的24个最小独立环3个方向的闭合差。其中,图1(a)~(c)分别为X、Y、Z方向的环闭合差。由图1知,从环闭合差结果来看,GLONASS短基线解算的外符合精度在毫米级水平,和GPS解算结果处于同一量级,但精度和稳定性均低于GPS。采用Helmert方差分量估计定权解算时,求得GLONASS与GPS观测值的权比在0.323 3~1.785 9之间,基线的外符合精度与GPS相当,这是因为GPS卫星数量较多,GLONASS卫星数量较少,加入GLONASS对外符合精度的提高有限。

图1 24个最小独立环3个方向的闭合差Fig.1 Misclosure of 24independent loops
根据n个闭合环各个方向的环闭合差di(i=1,2,…,n),按公式(13)计算3个方向环闭合差的均方根误差RMS。

式中,mi为第i个闭合环的基线数。RMS计算结果如表2所示,由表2可知,GPS/GLONASS组合定位的RMS较GPS和GLONASS都要小,这也说明了组合定位的外符合精度较单一GPS系统有所提高,但提高得并不明显,较单一GLONASS系统有较大提高。

表2 3个方向环闭合差的RMSTab.2 RMS of misclosure mm
图2为根据式(6)计算的3种方案的基线精度。其中图2(a)~(c)分别为X、Y、Z方向的精度估值。由图2可知,GLONASS短基线解算结果任一方向的内符合精度能达到毫米级,但是一般比GPS精度要低,采用Helmert方差分量估计定权时基线精度较单一GPS或GLONASS有较大提高,提高幅度最大超过50%。由此可见,加入GLONASS后,可以显著提高定位结果的内符合精度。


图2 37条基线3个方向的基线精度Fig.2 Precision of 37baselines
对其中的一条基线边进行单历元解算,用GPS/GLONASS整体方差分量估计得到的权作为GPS和GLONASS观测值之间的权比进行联合解算,同时采用单系统GPS进行单历元解算。图3为两种方法单历元解算的基线与整体解算基线3个方向偏差(ΔXi,ΔYi,ΔZi)平方和的平方根,根据式(14)进行计算。

图4为两种方法单历元解算的基线精度比较,图5为单历元的PDOP值比较。由图3、4、5可知,采用GPS/GLONASS组合静态相对定位可以显著改善可见卫星几何强度,降低PDOP值。和单一GPS系统相比,单历元解算的基线精度和可靠性都有明显提高,稳定性也大大增强。根据图3单历元解算的基线偏差Δi,按公式(15)计算两种方案的RMS。

图3 单历元解算基线偏差Fig.3 Baseline bias of single epoch solution
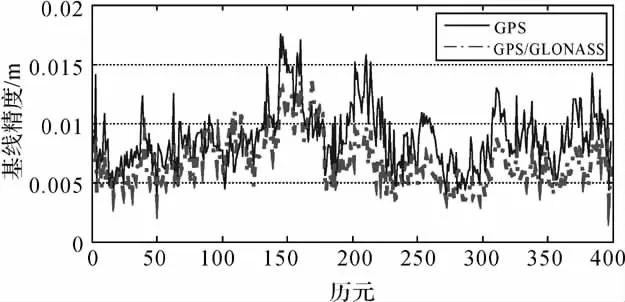
图4 单历元解算基线精度Fig.4 Baseline precision of single epoch solution

图5 单历元PDOP值Fig.5 PDOP of single epoch
其结果如表3所示,GPS/GLONASS组合定位单历元解算基线偏差的RMS较单一GPS小,基线精度约提高了10%。

表3 基线偏差的RMSTab.3 RMS of baseline bias mm
在城市、山区等某些特殊地区,受高楼或其他障碍物的遮挡,有时单一GPS系统的可用卫星数难以达到4颗,导致定位的精度和可靠性均比较低,甚至出现不能定位的情况。为了展示GPS/GLONASS组合定位的优越性,从观测文件中选取3颗GPS卫星和3颗GLONASS卫星,观测时间为30min,采样间隔15s,共120个历元,对21条基线进行解算。其解算结果与采用所有卫星解算结果的偏差如图6所示,其统计结果见表4。由此可见,当GPS卫星数较少且观测时间较短时,GPS/GLONASS组合基线解算的精度明显高于单一GPS系统,表明了在遮挡比较严重的情况下,GPS/GLONASS组合定位具有明显的优势。

表4 与已知基线偏差的统计信息Tab.4 Statistical information of bias with known baseline mm

图6 GPS、GPS/GLONASS解算3个方向基线偏差Fig.6 Baseline bias of 3directions
当同步观测3颗GPS卫星和3颗GLONASS卫星时,单一GPS或GLONASS系统已经无法进行单历元基线解算,但利用GPS/GLONASS组合观测值仍可进行联合解算。图7为3颗GPS卫星和3颗GLONASS卫星组合单历元解算基线与采用所有卫星解算基线3个方向偏差平方和的平方根,其根据式(14)进行计算。由图7可知,即使在GPS可用卫星数较少时,GPS/GLONASS组合基线解算在大部分情况下仍能达到厘米级精度。

图7 3颗GPS+3颗GLONASS卫星单历元解算基线偏差Fig.7 Baseline bias of single epoch solution with 3 GPS+3GLONASS satellites
6 结 论
将GLONASS参考卫星的单差模糊度按实参数求解是合理的,可以得到精度较高的定位结果;GPS/GLONASS组合定位时,采用 Helmert方差分量估计确定两类观测值的权比,其组合静态相对定位较单一系统解算的基线精度均有提高,尤其比GLONASS有显著提高,比GPS也有一定提高,其中单历元解的基线精度提高达到10%;当单一GPS或GLONASS系统可用卫星数较少时,GPS/GLONASS组合定位更能体现出优势。
[1] LEICK A.Aspects of GLONASS Carrier-phase Differencing[J].GPS Solutions,1998,2(1):36-41.
[2] HAN S,DAI L,RIZOS C.A New Data Processing Strategy for Combined GPS/GLONASS Carrier Phase-based Positioning[C]∥Proceedings of the ION GPS-99.Nashville:[s.n.],1999:1619-1628.
[3] HU Guorong,CUI Weihong.Combined GPS/GLONASS Precise Positioning for Long-distance Baselines[J].Geospatial Information Science,2001,4(1):24-27.
[4] WANG J.An Approach to GLONASS Ambiguity Resolution[J].Journal of Geodesy,2000,74:421-430.
[5] ZHANG Yongjun,XU Shaoquan,WANG Zemin,et al.Ambiguity Processing Approach in Combined GPS/GLONASS Positioning[J].Geomatics and Information Science of Wuhan University,2001,26(1):58-63.(张永军,徐绍铨,王泽民,等.GPS/GLONASS组合定位中模糊度的处理[J].武汉大学学报:信息科学版,2001,26(1):58-63.)
[6] GAO Xingwei,LI Yulin,GE Maorong.Data Processing of GPS/GLONASS Carrier-phase Difference[J].Science of Surveying and Mapping,2004,29(2):22-24.(高星伟,李毓麟,葛茂荣.GPS/GLONASS相位差分的数据处理方法[J].测绘科学,2004,29(2):22-24.)
[7] HABRICH H.Geodetic Applications of the Global Navigation Satellite System(GLONASS)and of GLONASS/GPS Combinations[D].Switzerland:University of Berne,1999.
[8] WANG J,RIZOS C,STEWART M,et al.GPS and GLONASS Integration:Modeling and Ambiguity Resolution Issues[J].GPS Solutions,2001,5(1):55-64.
[9] DUAN Juju,SHEN Yunzhong.GPS/GLONASS Combined Point Positioning Using Variance Component Estimation[J].Bulletin of Surveying and Mapping,2011(4):4-6.(段举举,沈云中.基于方差分量估计的GPS/GLONASS组合点定位[J].测绘通报,2011(4):4-6.)
[10] YANG Yuanxi,GAO Weiguang.Integrated Navigation by Using Variance Component Estimates of Multi-sensor Measurements and Adaptive Weights of Dynamic Model Information[J].Acta Geodaetica et Cartographica Sinica,2004,33(1):22-26.(杨元喜,高为广.基于方差分量估计的自适应融合导航[J].测绘学报,2004,33(1):22-26.)
[11] YANG Yuanxi,ZENG Anmin.Fusion Modes of Various Geodetic Observations and Their Analysis[J].Geomatics and Information Science of Wuhan University,2008,33(8):771-774.(杨元喜,曾安敏.大地测量数据融合模式及其分析[J].武汉大学学报:信息科学版,2008,33(8):771-774.)
[12] WANG Guangding,ZHANG Shengkang,YANG Ruliang.User Position Computation Based on Passive Beidou and GLONASS Navigation System Combination[J].Acta Geodaetica et Cartographica Sinica,2007,36(4):377-382.(王光鼎,张升康,杨汝良.基于北斗无源与GLONASS导航系统的卫星组合导航用户位置计算[J].测绘学报,2007,36(4):377-382.)
[13] YANG Yuanxi.Adaptive Kinematic Navigation and Positioning[M].Beijing:Publishing House of Surveying and Mapping,2006.(杨元喜.自适应动态导航定位[M].北京:测绘出版社,2006.)
[14] SUN Hongrui,SHEN Yunzhong,ZHOU Zebo.Integrated GPS/GLONASS Point Positioning Model and Its Accuracy Analysis[J].Engineering of Surveying and Mapping,2009,18(1):8-10.(孙 洪 瑞,沈 云 中,周 泽 波.GPS/GLONASS点定位模型及其精度分析[J].测绘工程,2009,18(1):8-10.)
[15] ENGELSBERG V,BABAKOV V,PETROVSKI I.GLONASS Business Prospects[J].GPS World,2008,19(3):12-15.
[16] PRATT M,BURKE B,MISRA P.Single-epoch Integer Ambiguity Resolution with GPS-GLONASS L1-L2Data[C]∥Proceedings of the ION GPS-98.Nashville:[s.n.],1998:389-398.
[17] TEUNISSEN P.The Least-squares Ambiguity Decorrelation Adjustment:A Method for Fast GPS Integer Ambiguity Estimation[J].Journal of Geodesy,1995,70:65-82.
[18] TEUNISSEN P.The Least-squares Ambiguity Decorrelation Adjustment:Its Performance on Short GPS Baselines and Short Observation Spans[J].Journal of Geodesy,1997,71:589-602.
[19] HU Guorong,CUI Weihong.Method of Weighted GPS/GLONASS Single Point Positioning[J].Acta Armamentarii,2002,23(1):59-63.(胡 国 荣,崔 伟 宏.组 合 GPS/GLONASS加权单点定位方法[J].兵工学报,2002,23(1):59-63.)
[20] CUI Xizhang,YU Zongchou,TAO Benzao,et al.Generalized Surveying Adjustment [M].Wuhan:Press of Wuhan University,2005.(崔希璋,於宗俦,陶本藻,等.广义测量平差 [M].武汉:武汉大学出版社,2005.)
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18 06:41:26
大地测量与地球动力学(2022年1期)2022-01-11 10:23:02
高技术通讯(2021年3期)2021-06-09 06:57:46
大地测量与地球动力学(2021年10期)2021-04-17 00:51:00
科学(2020年5期)2020-11-26 08:19:14
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
石油地球物理勘探(2017年4期)2017-12-18 07:14:49
World Journal of Integrated Traditional and Western Medicine(2017年3期)2017-03-10 18:18:16
舰船电子对抗(2016年5期)2016-12-13 08:41:14
World Journal of Integrated Traditional and Western Medicine(2016年4期)2016-03-28 02:08:04
