
钢管高速漏磁探伤静压气浮探靴理论研究
2012-07-25 04:05:00姜现想康宜华伍剑波
中国机械工程 2012年15期
姜现想 康宜华 伍剑波
1.金日成综合大学,平壤,朝鲜
2.华中科技大学数字制造装备与技术国家重点实验室,武汉,430074
0 引言
在钢管漏磁探伤过程中,为使获得的漏磁信号具有最大幅值和良好的一致性,一般要求磁敏传感器尽可能靠近钢管,且传感器与钢管之间的提离距离保持不变。在自动化探伤过程中,传输辊道的制造安装误差以及钢管的直线度误差使得钢管在前进过程中不可避免地产生偏移,为此,漏磁探伤中要求磁敏传感器同轴跟踪钢管。
探靴作为磁敏传感器的承载体,是漏磁探伤设备的重要组成部分。传统接触式探靴以内表面紧贴钢管,实现主动跟踪。探靴的形状为弧形,曲率半径与钢管外径相同,传感器布置在探靴内部。探靴在扶正跟踪机构提供的外力作用下紧贴钢管表面,当钢管发生偏移时,探靴随着钢管一起运动。这样,传统探靴通过接触式跟踪方式实现了传感器与钢管之间的提离值保持不变。
由于探靴和钢管表面之间存在摩擦,所以一般对探靴摩擦面进行喷涂处理以延长使用寿命。当探靴涂层厚度由于摩擦作用损耗到一定值时,需要更换探靴。传统接触式探靴结构目前广泛应用于钢管低速(探伤速度低于2m/s)探伤。
随着我国钢管行业的发展,国内连轧无缝钢管的生产速度已经达到3m/s,这对与钢管生产相配套的漏磁设备探伤速度也提出了更高要求。然而,高速探伤给接触式探靴的使用带来了一些新的问题。探靴与钢管之间的高速剧烈摩擦使探靴涂层快速消耗,导致探靴更换频繁,并且高速摩擦产生的热量不能及时散发出去,使传感器工作环境温度升高,影响检测精度和稳定性。因此,接触式探靴结构在进行高速探伤时已不再适用[1-2]。
1 气浮探靴工作原理
高速漏磁探伤气浮探靴利用探靴与钢管表面之间形成的气膜来消除探靴与钢管之间的摩擦,实现对钢管的同轴跟踪。探靴在轴向方向均匀布置简单孔式节流器,气体流通过节流孔后形成压降,并在钢管表面形成以扶正机构支点为中心的对称压力分布,如图1所示。
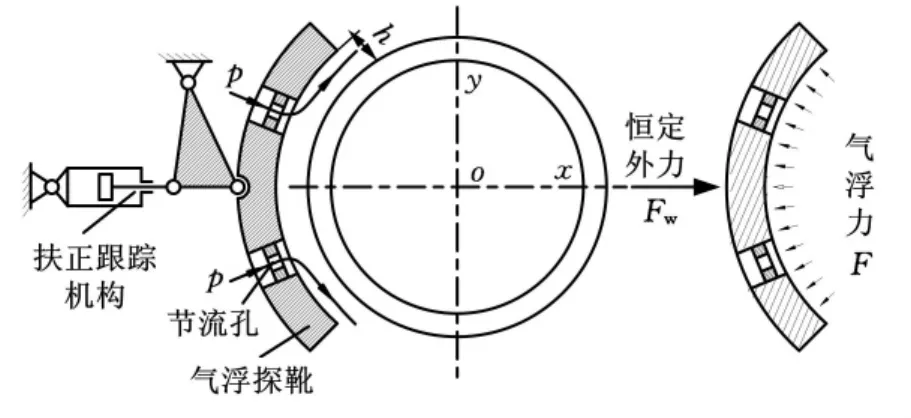
图1 漏磁探伤气浮探靴工作原理
探靴在气体作用力F与恒定外力Fw的共同作用下保持平衡,并形成厚度为h的气膜。当钢管轴线发生偏移(如钢管沿着x轴左移)时,会导致气膜厚度h减小,气流阻力增大,流速降低,从而使整个气膜内压力有不同程度的提高,气体作用力F增大,探靴在气体作用力F和外力Fw作用下左移,最终达到新的平衡位置。这样,气膜厚度h被限制在能满足探伤要求的微小范围内变化,从而实现了探靴对钢管的非接触式跟踪。由于气膜厚度小,根据漏磁场强度与传感器提离值之间的关系,气浮探靴所形成的气浮层对漏磁场强度基本没有影响。
2 气浮探靴静态特性分析
为获得探靴气体作用力F与探靴结构参数的关系,以气浮探靴为研究对象,考虑到钢管直径是气膜厚度h的1000倍,所以不考虑钢管表面曲率的影响,并将气膜沿着钢管轴心线展开成平面。气浮探靴结构参数如图2所示。探靴宽度L=Rθ0(R为钢管外表面的半径),长度L1=sL(s为长宽比),节流孔的直径为d,气膜弧长对应的相位角为θ0,两节流孔间弧长对应的位相角为α0。将气膜按节流孔数目2n在轴向上均分成n等份,每一等份宽度b=L1/n。
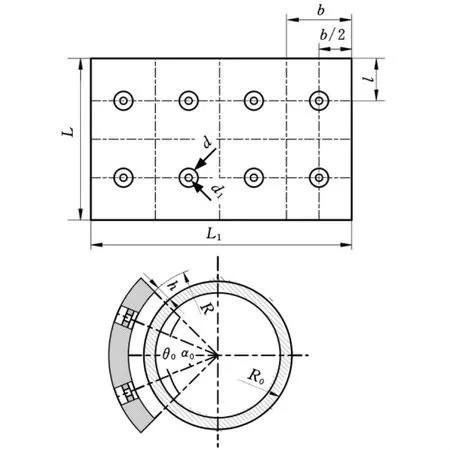
图2 气浮探靴几何结构参数
探靴气膜气浮力F0为n等份气膜气浮力Fi的叠加:

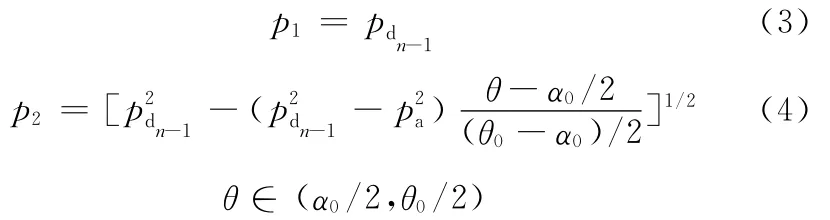
由于气浮探靴结构具有几何对称性,气浮反力F0必经过探靴几何中心。气流经过节流孔后,气流方向由垂直于气膜方向变为平行于气膜方向。为求出气膜气浮力F0,考察气流压力在气膜上的分布,根据对气膜的划分,压力分布有两种,如图3所示。第一种是气膜中间部分,即图3中的2~(n-1)部分,2个节流孔间无气体流动,气体自小孔流出后,立即充满等份的全宽度,使气体在每个等份内呈一维流动;每等份内两节流孔间的压力相等,其值为该等份气体流经节流孔后的出口压力pdi;气体无轴向流动,只是沿圆周方向流向探靴端面,2~(n-1)部分气体压力值由节流孔出口压力pdi降至端面的环境压力pa。第二种是气膜两端面部分,即图3中的1、n等份,气流经节流孔后沿圆周方向和轴向方向均有流动。1、n部分的气体压力由节流孔出口压力值pdi经过不同路径降至环境压力pa。
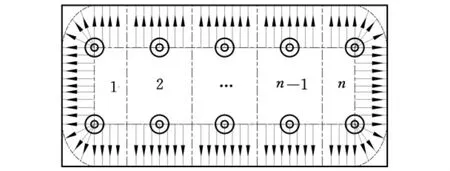
图3 气浮探靴流体流动方向示意图
根据上述分析,由气浮探靴具有几何结构对称性可知,第2~(n-1)等份气膜气浮力相同,第1、n等份浮力相同,则根据式(1),气浮力F0为

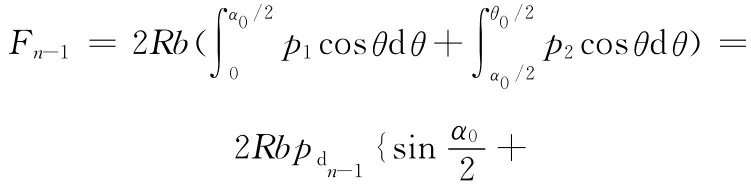
2.1 第n-1等份气膜气浮力Fn-1分析
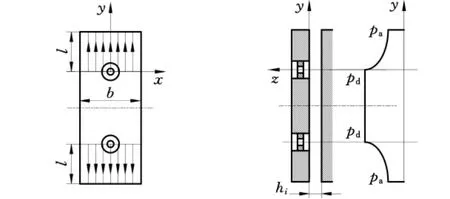
图4 第n-1等份气膜压力分布
根据气体质量流量和状态方程,假设气体在流动过程中为等温[3],则可得第n-1等份气膜压力分布方程:
式中,p1为两个节流孔间的区域压力;p2为从节流孔到探靴端面的区域压力。
第n-1等份气膜气浮力为

式中,σ、βn-1为节流压力比,σ=pa/p0,βn-1=pdn-1/p0;p0为供气压力。
从伯努利方程式可得出第n-1等份的节流孔的气体质量流量

式中,A为节流孔面积,A=πd2/4;ρa为大气密度。
当βn-1≤βk(βk= [2/(k+1)]k/(k-1))时,

当βn-1>βk时,

对于空气,k=1.4,则βk=0.528,流量系数φ=0.8,那么

2.2 第n等份气膜气浮力Fn分析
由于第n等份气膜气浮力具有对称性,只需分析上半部分,将其分划分为a、b、c、d四个区域,如图5所示,图5,l=R(θ0-α0)/2,by=Rα0/2,则第n等份气膜气浮力为

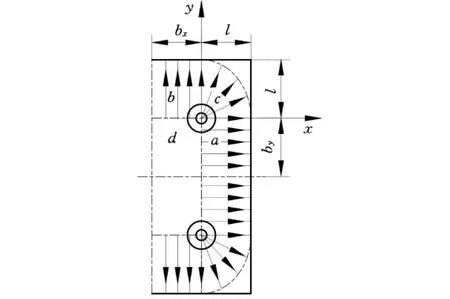
图5 第n等份气流流动方向示意图
(1)a区气浮力Fa。单向流动区a的压力分布方程和气浮力分别为
(2)b区气浮力Fb。单向流动区b的压力分布方程和气浮力分别为
(3)c区气浮力Fc。混合方向端点角区c的压力分布方程[4-7]和气浮力分别为
(4)d区气浮力Fd。无流动区d的压力分布和气浮力分别为


根据式(8)可获得第n等份气膜气浮力Fn,并最终可根据式(2)获得气膜气浮力F0。气膜气浮力F0减去探靴另一侧面所受大气压力F1之后才是与外力相平衡的探靴所受气体作用力F,大气压力F1为

探靴所用气体作用力

最终,探靴在气体作用力F和外力Fw的共同作用下保持平衡,并实现对钢管的跟踪。
3 探靴设计
针对直径为130mm的钢管,设计相应的气浮探靴,基本结构参数如图2所示。图2中,l=L/4=25.5125mm,R0=R= 65mm,θ0= π/2,α0=π/4,d=1mm,d1=5mm,b=L1/4=51mm。气浮探靴轴向均匀布置共8个节流孔,对称分布在探靴轴向中心线两侧。气源压力p0=0.4MPa,为使探靴近可能贴近钢管,气膜目标厚度h0=0.1mm,此时得出探靴所受气体作用力F=260N,因此外界气缸提供的恒定外力Fw=260N。
根据气浮探靴结构参数与气体作用力的关系绘制出F-h曲线,如图6所示。由图6可得探靴所受气体作用力与气膜厚度两者间的作用规律:当钢管轴线发生偏移如钢管远离探靴时,气膜厚度h变大,气浮力减小,探靴在恒定外力和气浮力的作用下向钢管移动,反之则与钢管分离。最终,气浮探靴在气浮力和外力的共同作用下实现对钢管的同轴跟踪。
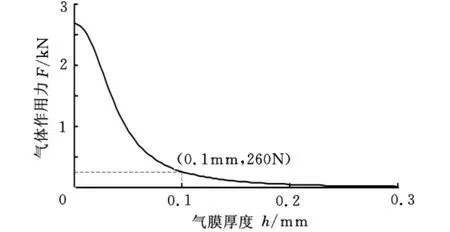
图6 气体作用力与气膜厚度关系曲线图
4 结语
本文提出并分析了一种新型钢管高速漏磁探伤静压气浮探靴,其原理是,气浮探靴与钢管表面由具有一定压力的气体充满,从而到达分离探靴与钢管的目的,消除了传统探靴与钢管之间的直接摩擦,解决了传统接触式探靴存在磨损和发热的问题,实现了对钢管的非接触式跟踪,尤其适应钢管高速漏磁探伤。
[1]Sun Yanhuam,Kang Yihua.High-speed Magnetic Flux Leakage Technique and Apparatus Based on Orthogonal Magnetization for Steel Pipe[J].Materials Evaluation,2010,68(4):452-458.
[2]Chen Xuedong,He Xueming.The Effect of the Recess Shape on Performance Analysis of the Gas-lubricated Bearing in Optical Lithography[J].Tribology International,2006,39(11):1336-1341.
[3]刘暾,刘育华,陈世杰.静压气体润滑[M].哈尔滨:哈尔滨工业大学出版社,1990.
[4]温诗铸.摩擦学原理[M].2版.北京:清华大学出版社,1990.
[5]李鹏飞,刘宏昭,陈宏,等.高速运行条件下静压气浮导轨摩擦力分析[J].中国机械工程,2010,21(13):1950-1953.
[6]孙西芝,陈时锦,程凯.空气静压导轨静态性能的解析计算及分析[J].机械设计与制造,2005(10):40-42.
[7]戴一帆,彭小强.复合节流的静压导轨设计及其稳定性分析[J].中国机械工程,2000,11(8):880-900.
猜你喜欢
农业装备与车辆工程(2022年2期)2022-10-30 12:59:02
中国特种设备安全(2021年9期)2021-03-02 05:40:40
动力工程学报(2021年1期)2021-01-21 17:43:06
火箭推进(2020年2期)2020-05-06 02:53:56
动漫界·幼教365(中班)(2019年10期)2019-10-28 01:53:17
测控技术(2018年10期)2018-11-25 09:35:44
石油化工自动化(2018年5期)2018-11-14 02:34:24
中学生天地(A版)(2017年10期)2017-10-28 09:07:14
学苑创造·B版(2017年1期)2017-02-21 20:58:07
学苑创造·B版(2017年1期)2017-02-21 18:52:47
