面向工程应用的导航算法性能测试系统研究①
2012-07-18 03:50丁继成张军岭李英飞
全球定位系统 2012年1期
丁继成,张军岭,赵 琳,李英飞
(哈尔滨工程大学自动化学院,黑龙江 哈尔滨150001)
0 引 言
卫星导航、惯性导航及其组合系统是目前绝大多数应用领域首选的导航定位方式,国内外学者提出了大量的实现方案和优秀算法,目前,已有一些设备能够辅助完成这些算法方案的实际工程测试与验证,如小体积GPS集成模块、可重配置的GPS软件接收机、各种高精度GPS差分定位仪、可用于半实物仿真的各类卫星导航信号模拟器、惯性导航仪器/设备、基于微机电系统(MEMS)技术的陀螺仪和加速度计器件、用于导航数据处理的嵌入式微计算机平台等[1-4]。然而,由于构建验证系统的复杂性以及诸如信号模拟器、高精度导航定位仪等一些设备的高成本性,使得大多数算法方案仍停留在理论仿真阶段,特别是GNSS/SINS组合算法的深入研究,缺乏接近实际工程应用的测试。设计并实现了一种基于高性能现场可编程门阵列(FPGA)和数字信号处理(DSP)器件、面向工程应用的多功能导航算法性能测试系统方案,可对卫星导航和惯性导航优秀算法进行实时、实地性能测试,更为GNSS/SINS实用组合算法的前沿性探索研究提供了面向工程应用的软硬件平台支撑,固化相应算法程序后也可用于GNSS单频、多频接收机或者SINS导航计算机、组合导航系统等。
1 系统硬件平台设计
导航算法性能测试主要完成导航原始数据获取和算法运算,要求系统具有完善的硬件平台支撑,支持多种导航信号的接收,具有高效的运算性能。因此,系统硬件平台采用开放的分布式结构设计思想,多处设计保证其多功能性和高灵活性,可完全作为满足不同测试需求的硬件平台支撑。
1.1 总体设计
系统总体结构如图1所示,FPGA和DSP为系统数据处理的核心。FPGA适合数据量大,运算速度要求高,算法结构相对简单的情况,进行硬件编程实现,能够实现底层信号快速处理;针对高层处理算法数据量低但结构复杂的特点,采用运算速度快、寻址灵活、通信机制强大的DSP芯片实现。因此,利用FPGA完成底层简单运算、数据接收发送及一些控制工作,使DSP专注于复杂算法的实现,二者可通过外存储器(EMIF)接口进行快速通信,或通过串行外设接口(SPI)进行串行通信。
作为整个系统的控制中心和数据交换桥梁,FPGA完成GNSS和惯导原始测量信息的接收与预处理,再送入DSP进行导航解算,运算结果传回FPGA,由LCD液晶屏进行显示。在此过程中,FPGA可控制输出数据处理任意阶段的数据信息,并通过USB或串口输入至上位机,同时,上位机可通过FPGA对系统下达各种工作模式指令。为实现数据流无缝缓冲和处理,FPGA扩展两片SRAM以完成乒乓操作。
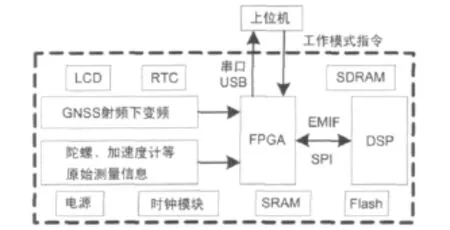
图1 系统总体结构图
1.2 灵活性设计
通过对整个算法测试系统平台功能需求分析,硬件平台灵活性设计主要体现在用户可任意配置时钟支持、灵活的射频(RF)前端支持、MEMS器件及其它多导航传感器支持三个关键部分。
1)时钟频率可任意配置性
用户可配置时钟方案不仅从硬件层面满足系统对任意频率时钟的需求,还可避免不同芯片采用不同时钟所带来的系统运算误差,提高系统整体性能。如图2所示,时钟源采用精度为1PPM的10 MHz温补晶振,鉴于其输出幅值低和驱动能力弱,由AD8012进行整形放大,再由时钟芯片ICS525进行变换输出用户可任意配置的时钟信号。
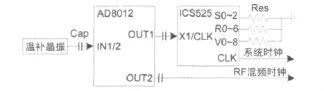
图2 用户可配置时钟方案
2)多GNSS信号接收支持
GNSS软件接收机RF前端芯片采用MAX2769,适 用 于 GPS/GLONASS/GALILEO接收机,满足GNSS信号采集多样性需求,不仅可实现单频卫星导航接收机方案,也可实现多体制卫星导航系统的组合。该器件内部集成了包括双输入低噪声放大器、混频器、镜像抑制滤波器、可编程增益放大器、压控振荡器、N分频频率合成器、晶体振荡器以及多位ADC完整的接收机链路,总噪声系数低达1.4dB.片内∑-ΔN分频合成器可实现±40Hz精度的中频编程,从而与主机系统所提供的任意基准或晶体频率配合工作。集成的ADC输出可以同时为I路和Q路通道输出一个或两个量化位或者为I通道输出三个量化位,支持CMOS和有限差分逻辑电平两种数据输出格式。
3)多导航传感器支持
为满足对惯性元件原始测量数据的需求,选用6自由度、数字输出惯性传感器ADIS16365,通过SPI端口获取X、Y、Z轴角速率和线性加速度,及内部温度等原始测量信息。其SPI通信符合3.3 V电平标准,减小了系统硬件复杂度。同时,硬件平台设计时,为其他导航传感器的数据输入留有充足的可扩展接口,例如,磁强计 HRM3000的RS232输入接口等。
2 系统软件模块设计实现
由于新算法的测试验证不可避免地需要与其相关的基础平台算法的支持,因此,构建图3所示的基于本平台的低成本、参数可重置、完全开放的GPS软件接收机和捷联惯导系统软件模块。当需要验证某一部分新算法时,可避免从底层基础算法开始搭建。
如图3所示,GPS高频信号经RF前端下变频后,传输给FPGA和DSP进行分布式处理,惯性传感器作为从设备通过SPI突发读(Burst Read)方式向FPGA快速传输陀螺仪、加速度计等原始测量信息,经存储和预处理后,供给DSP进行解算,图中虚线表示该基础算法平台可为GNSS和SINS不同组合方案提供支持。因此,系统软件主要包括卫星导航信号处理模块和惯性导航数据处理模块。
2.1 卫星导航信号处理模块
如图3所示,卫星伪距噪声码(PRN)编号分配器在自动搜星开始后为12个通道分配不同卫星号,防止多个通道同时搜索同一颗星。载波和C/A码生成器产生本地中频载波数据和当前搜索卫星的C/A码序列。相关累加器实现载波剥离和C/A码剥离,进行积分运算,产生超前、当前和滞后积分值,提供给鉴相器使用。鉴相器与滤波器通过计算积分值实现鉴频、鉴相和鉴别码相位功能,经过滤波处理后产生载波环和延迟锁定环所需要的调整量。捕获跟踪控制器是整个通道的控制中心,通过鉴别相关峰值控制整个通道的状态,并产生其他模块所需的控制量,包括请求新的PRN编号、提供下次搜索频率的偏移值、提供码相位移动信号、分配环路稳定所需的控制量等。数据解调与观测量提取器为定位解算提供导航电文和相关观测量信息。在DSP中,采用通用的LS(最小二乘方法)依次对伪距和多普勒方程组进行求解的[2],得到用户位置和速度信息。
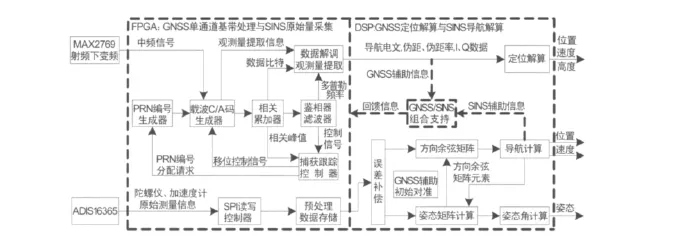
图3 基于硬件平台的系统软件设计
2.2 惯性导航数据处理模块
依据GNSS辅助信息进行初始对准是惯导系统启动时的首要工作,如图3所示,以便为积分运算提供系统的初始速度和位置信息。FPGA获取惯导原始测量信息后,先进行预处理和存储管理,便于DSP的读取并作误差补偿计算。陀螺仪、加速度计原始测量信息只是相对于载体坐标系的量,必须通过姿态矩阵转换至导航坐标系下,采用经典的四元素法进行姿态矩阵的更新运算。获取姿态矩阵后,将加速度计测量的比例值通过姿态矩阵变换后和其它相关量一起代入速度方程,求出速度分量,而用户的位置信息基于此做积分运算即可获得。
3 系统对GNSS/SINS组合系统的支持
GNSS与SINS的组合应用与研究已经成为一种趋势,组合的重点在于数据融合算法的设计与实现[7],而融合数据获取和融合前数据同步是进行数据融合的先决条件。
3.1 各组合模式数据融合需求分析
卫星导航与惯性导航的组合按组合深度可分为松组合、紧组合和超紧组合,图4显示了不同组合模式所需关键信息。随着组合深度的增加,所需信息从位置、速度,到伪距、伪距率,再到GNSS相关运算的I、Q数据,获取难度不断加大,对分系统的开放性要求越来越高。同时,较深的组合势必增加算法复杂度,对处理器性能提出了更高的要求。
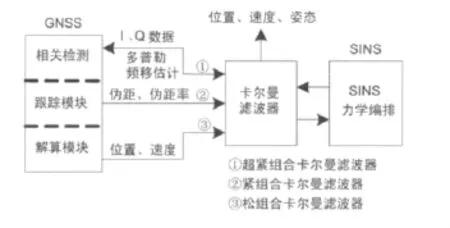
图4 GNSS/SINS各组合结构图
本测试系统在FPGA中实现GNSS软件接收机基带处理,整个过程完全开放,可方便获取伪距、伪距率和I、Q数据等信息,高性能浮点DSP更保证了各种改进的卡尔曼滤波算法高速、高精度运行[5-7]。同时,采用 TI公司专为C6000系列 DSP设计的基本输入输出系统(BIOS)实时多线程开发环境,确保系统能够进行多线程实时运算。
3.2 数据同步问题
组合导航系统在进行数据融合前,必须保证用于融合的数据在融合时间点上严格一致,解决GNSS和SINS两个子系统数据同步问题的难点在于两者更新率差别较大。以GPS/SINS组合为例,一般情况下,GPS的数据更新率典型值为1Hz,SINS的数据更新率则高达100Hz以上,本系统采用的MEMS器件ADIS16365在BurstRead模式下可达到5kHz.并且各子系统运行时存在不同的通信延迟等原因,也给数据同步造成一定困难。
本测试系统基于FPGA的开放性结构,与DSP灵活的通信方式,方便GPS/SINS在数据同步上的软硬件实现[10]。要获取同一时刻的数据信息,关键是求出同步时间差t1和t2,如图5所示,利用GPS的1PPS脉冲作为同步标准时刻,FPGA接收到GPS中频数据时,产生一个中断,通知DSP进行计数,直到此后第一个SINS数据到来,得到t1,而t2=T-t1,得到t1和t2,可以用卡尔曼滤波器作最优估计,利用与GPS数据相邻的两个SINS数据来推算出GPS时刻的SINS数据,保证了两种数据在时间上的严格一致性。
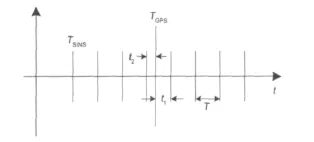
图5 GPS与SINS数据同步
4 测试结果与分析
硬件平台实物如图6所示,尺寸为17.24cm×12.66cm,方便携带。5V供电,整机功耗<2.5 W.平台各部分电路调试工作正常,电源模块转换输出的3.3V和1.2V电压具有噪声低、稳定性强等特点。对平台时钟部分的可任意配置性作重点验证,按时钟理论需求值39MHz对时钟芯片ICS525配置后,实际输出如图7所示,驱动能力、时钟频率均符合要求。
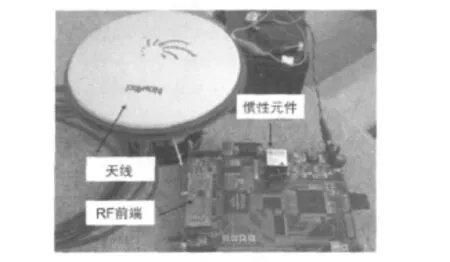
图6 系统硬件平台实物图
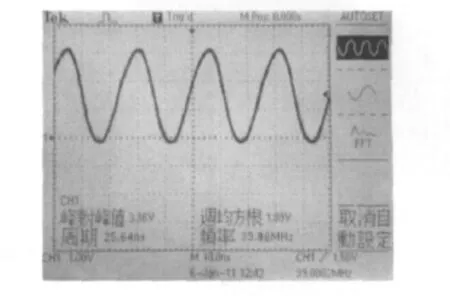
图7 示波器测量的时钟波形
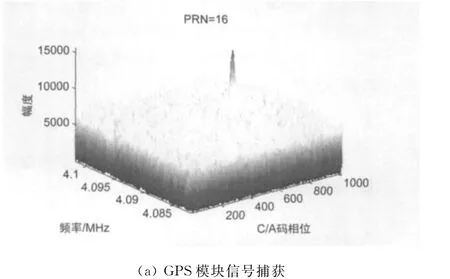
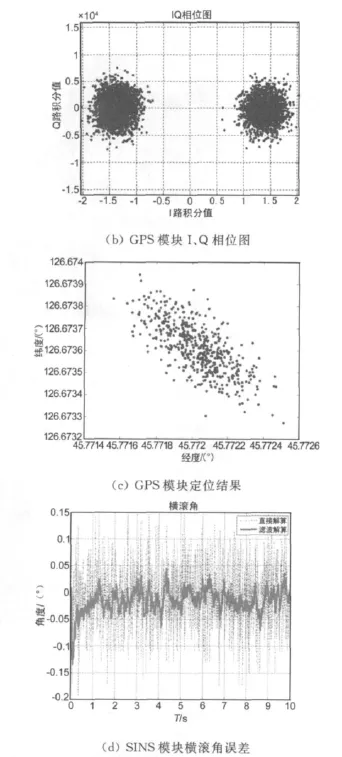
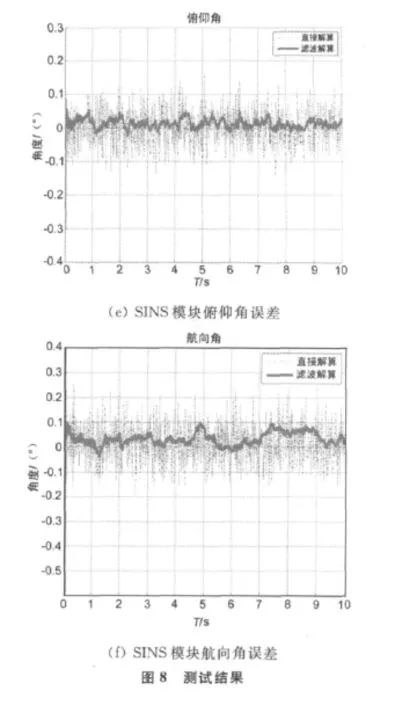
GPS软件模块实时静态定位测试实验采用NovAtel公司高性能天线GPS-701-GG,软件程序固化在硬件平台非易失存储器上,定位基准由No vAtel公司两套Propak-V3型GPS接收机组成的差分定位系统测得。实际测试过程中,中频信号频率4.092MHz,采样频率16.368MHz,搜索步长500Hz,复制的载波频率精度0.019Hz,C/A码相位精度在1/2个码片之内,中频信号量化为2bit,载波(NCO)输出的正余弦量化为4bit,捕获门限设为3 500.图8(a)中明显的相关峰值显示对16号星捕获成功,图8(b)表明相位跟踪成功,有稳定的数据比特输出,图8(c)为500次单点静态定位Matlab 统 计 图,与 基 准 位 置(45.772 1°,126.673 6°)相比,定位精度优于10m(CEP95)。惯性导航软件模块测试实验的原始测量数据由上文所述的MEMS器件ADIS16365提供,数据更新率5kHz,分辨率14bit,三轴陀螺仪具有±75°/s、±150°/s、±300°/s三种数字量程刻度的可设置性,平方根(RMS)噪声密度为0.044°/sec/三轴加速度计测量范围为17g,RMS噪声密度为静止情况下做姿态跟踪试验,结果如图8(d)、(e)、(f)所示,分别为横滚角、俯仰角和航向角的静态跟踪误差,虚线为直接解算结果,误差较大,达到0.2°,实线为加入卡尔曼滤波后的解算结果,跟踪精度<0.05°.软件模块测试结果表明:卫星导航和惯性导航基础算法具备基本定位功能且有一定的精度,为本测试系统提供了软件层面的有力支撑。
4 结 论
研究并设计了一套面向工程应用的多功能导航算法性能测试系统方案,用户可配置时钟模块、RF前端模块、多导航传感器支持以及软件模块的构建使系统对导航算法性能测试具有完善灵活的软硬件支撑功能,测试与分析表明:本系统完全可以以较低的成本使优秀导航算法的研究由计算机仿真转向实时系统测试,具有重要的实际工程应用价值。鉴于目前本课题只是初步完成了GPS软件接收机和捷联惯导系统的静态测试实验,下一步工作目标将进一步完善系统基础算法平台,在复杂环境下对导航算法性能展开测试。
[1]BERNSTEIN J.An overview of MEMS inertial sensing technology[J].Sensors,2003,4(2):11-13.
[2]PETER R.Design of a single frequency GPS software receiver[D].Aalborg:Aalborg University,2004.
[3]GUENTER W H,THEOMAS P.Platforms for a future GNSS receiver a discussion of ASIC,FPGA,and DSP technologies[J].Inside GNSS,2006(4):56-62.
[4]胡 锐,薛晓中,孙瑞胜,等.基于FPGA+DSP的嵌入式GPS数字接收机系统设计[J].中国惯性技术学报,2009,17(2):187-190.
[5]JAN W,Trommer G F.Tightly coupled GPS/INS integration for missile applictions[J].Aerospace Science and Technology,2004,8(7):627-634.
[6]CASPER E S.INS and GPS integration[D].Lyngby,Denmark:Technical University of Denmark,2006:60-72.
[7]JOVANCEIVIC A,BROWN A,GANGULY S,et al.Ultra tight coupling implementation using real time software receiver[C]//Proceeding of ION GNSS 2004,Institute of Navigation,2004:1575-1586.
[8]陈 帅,管雪元,薛晓中,等.弹载GPS/SINS组合导航信息同步与融合技术[J].火力与指挥控制,2009,34(10):69-72.
[9]DA R.Investigation of a low-cost and high-accuracy GPS/IMU system [C]//ION National Technical Meeting.Santa Monica,California,14-16January,1997:955-963.
[10]游文虎,姜复兴.INS/GPS组合导航系统的数据同步技术研究[J].中国惯性技术学报,2003,11(4):20-35.
猜你喜欢
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
导航定位学报(2022年1期)2022-02-17
数学小灵通·3-4年级(2021年9期)2021-10-12
小学生学习指导(低年级)(2020年10期)2020-11-09
数学小灵通(1-2年级)(2020年6期)2020-06-24
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
中学生数理化·八年级数学人教版(2017年2期)2017-03-25
数学大王·中高年级(2017年2期)2017-02-08
电子制作(2016年1期)2016-11-07