
一种微处理器控制自动平衡吊具
2012-07-17 07:37刘新妹
山西电子技术 2012年2期
刘 超,刘新妹,侯 文
(中北大学信息与通信工程学院,山西太原030051)
随着国民经济的高速发展,起重吊运作业在经济建设的各个领域中使用得愈来愈频繁和普遍。我国不断勘探出各种类型的矿山、油田,多数企业都是自己制造吊具,专业性、安全性差距较大;此外航天、国防、建筑等行业给高端吊索具创造了无限的发展空间,吊索具在技术方面不断刷新记录[1]。
在航空航天、精密机械等重要领域,随着关键部件质量要求的提高,对起重吊装和装配操作提出了很高的要求。自动平衡吊具是一种由微处理器控制的全自动吊具,它可以在起吊过程中快速的自动调平,使被吊物的质心在吊具本身得到调整,从而使整个起吊过程中被吊物始终保持在水平状态;也可以使被吊物在起吊过程中快速地调姿,使被吊物保持一个任意的预先设定的姿态。满足上述领域中对起重吊装的高要求,是实现安全、高效、自动吊装装配作业的重要技术手段。
1 吊具机械结构及原理简述
为进行快速的装配体设计,吊具机械结构使用Solid Works进行装配体建模,各部分的配置及结构如图1所示。
吊具本身由机架(兼做y向导轨)、y向电机、y向丝杠、中间滑板组件(含x向导轨)、x向电机、x向丝杠、吊耳组件(4个)、手轮(4个)、吊环组件、吊索等部分组成。
倾斜传感器安装在机架上,传感器的工作方向分别与吊具的x、y方向平行,系统上电后,系统控制器读取倾斜传感器测出的机架倾斜数据(传感器的俯仰角和横滚角的数据分别代表吊具在x、y向的机架倾斜状况),当测出的数据需要吊索沿x方向移动时,系统控制器根据吊索的当前位置和需要的位移量,计算出对应的速度和方向的控制信号,x向电机驱动电路根据系统控制器输出的控制信号,以合适的电机轴旋转方向和转速启动x向电机运转,电机旋转x向丝杠带动吊环组件完成指定幅度的移动;当需要吊索沿y方向移动时,y向电机驱动电路根据系统控制器输出的控制信号以合适的电机轴旋转方向和合适的转速启动y向电机,电机旋转y向丝杠带动中间滑板组件完成指定幅度的移动。
在吊具运行状态下,x、y向的控制过程是同时且连续进行的,直至吊具调平。
转动手轮,可以带动小丝杠调节滑块在x轴方向上的位置,以适应不同大小的被吊件。
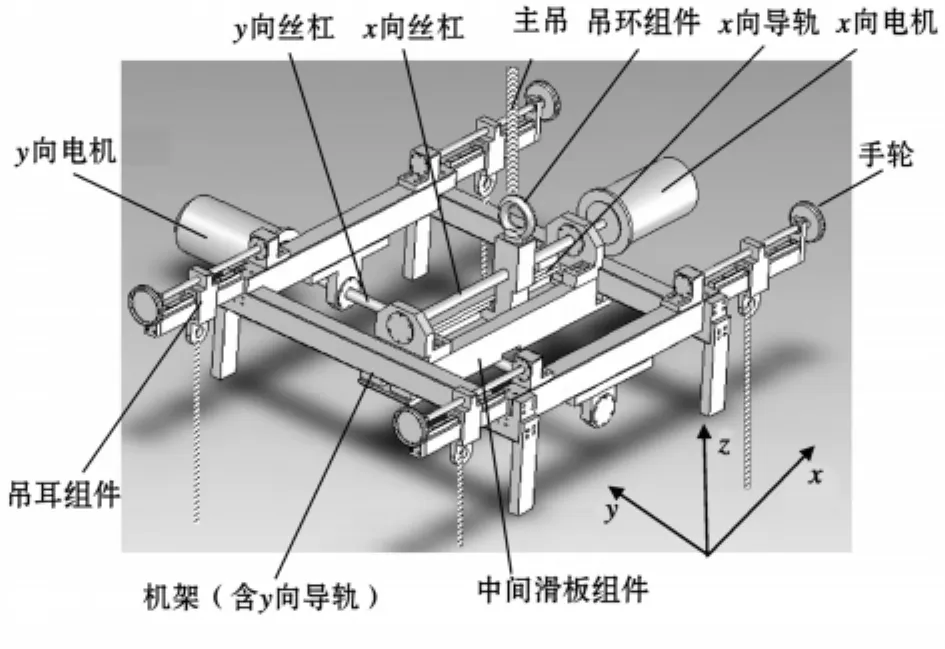
图1 吊具机械结构示意图
2 控制系统概述
系统结构如图2所示,这里把整个系统按照检测、控制、通信、执行的顺序划分成四大块,各部分的工作如下:
检测部分:主要包括倾角和接近传感器等硬件。其中前者用于获得吊具的俯仰角和横滚角并传送给SP2539的子串口,为下位机判断电机转动方向,计算移动行程提供依据。后者分为软件停机传感器组和机械断电传感器组,采用双重制动策略,保障吊具在使用过程中平稳调平和安全使用。
控制部分:单片机嵌入式系统是控制机构的核心部件,首先接收检测部分的输出值,包括吊具的实时姿态、软件停机传感器组状态,同时调用子程序,处理输入信号并给出动作信号给1、2号变频器,使x,y向电机遵循指令进行动作。最后,单片机还需要和上位机设备进行交流,方便操作人员随时掌握系统的状态。
通信部分:这部分解决单片机分别与检测机构、上位机以及执行机构的信息传输。具体的讲,主要是指单片机与倾角和接近传感器、上位机调平控制指令、1、2号变频器输出频率、角度显示以及SP2539串口扩展系统之间的信息传输。
执行部分:接收单片机的输出信号,并按照上位机自动、手动调平指令调节1、2号变频器输出,从而驱动x、y向电机转动方向,促使主吊点偏移完成调平工作。无线组件将上位机和下位机无缝连接,使得上位机的控制和数据获取更加实时。
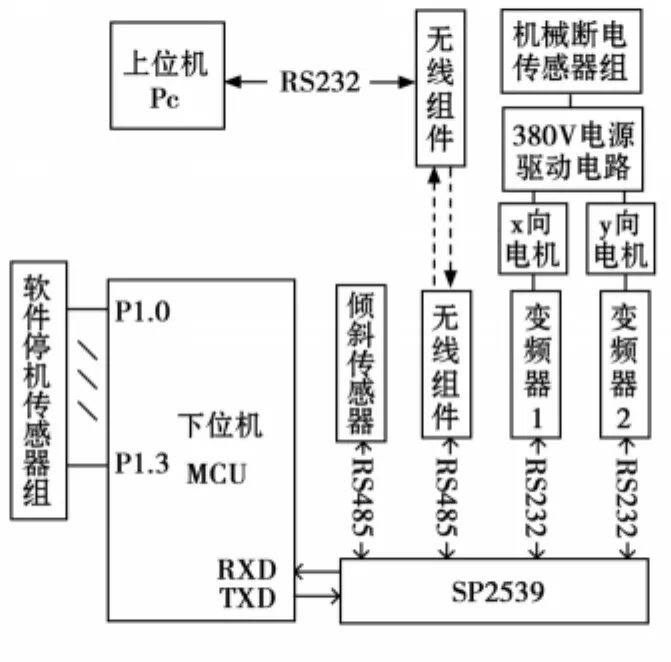
图2 系统结构框图
3 吊具结构及承重系统设计
3.1 吊环
考虑吊具自身重量,并考虑起吊过程的冲击加速度,根据 GB825 -88,选择螺钉 GB 825 M36,垂直悬吊2.3 t。
3.2 框架
为了足够的安全裕度,涵盖考虑最不利情形:一端固支的水平矩形等截面悬臂梁,自由端受重力10 000/2=5000 N;自重加其它零件重量4 000 N偏于安全地视为作用于悬臂梁悬出端。矩形高为100 mm,宽为68 mm;

因此,各种低碳钢均满足要求。
3.3 电机
选用YVP100L2-4变频电机,最高转速5 000 rpm,多级可调。额定功率3 kW,额定扭矩19 Nm。不使用减速机,螺距为3 mm,当电机转速为960 rpm时,每秒钟吊环移动48 mm。这个速度可以看做吊具工作时的最高速度。
电机功率=吊具上升速度×(重力加速度+上升加速度)×(被吊质量+设备质量)/机械效率 =0.05×(9.8+0.1) × (1 000+400)/0.22=3 kW
上述式子是关于吊具彻底歪斜这种最不利情况的,裕度过大。电机功率选国标系列值3 kW。
3.4 螺纹传动机构
螺牙强度能承受(1 000+400)×9.8N的轴向力(吊具彻底歪斜,这是最不利的情况)
选用梯形螺纹。因为矩形螺纹运动精度高,成本高。
根据耐磨性初选中径,梯形螺纹:
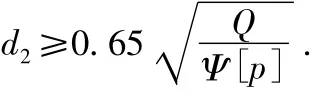
其中,[p]=18 MPa,Ψ =H/d=2.5,Q=14 000 N,
得到d2=11.5 mm。为了更好的刚度,选d=32 mm,螺距t=3 mm。
螺母螺纹牙强度应满足:

螺杆由于受拉扭组合,校核其强度

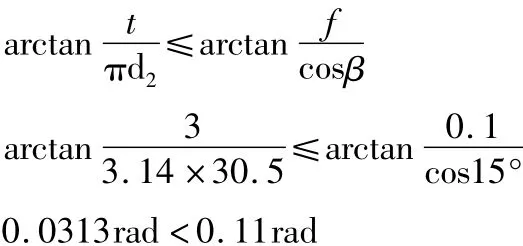
另外,单头小螺距,自锁性满足:
传动效率:

压杆稳定
注意两端支撑情况,首先计算柔度系数,


满足要求。另外,由于施加轴向力的结构不允许径向位移,所以实际的稳定性安全系数还会高很多;其次,使用中也没有整个吊具倾斜90度的情况。
4 小结
本文对吊具的机械结构的设计进行了介绍,并说明了系统工作原理。对吊具结构及承重设计、动力系统设计给出了详细计算过程。本设计已经获得了国家专利的授权。
[1]北京诺鼎工业设备有限责任公司.吊索具行业市场前景分析[OL].http://www.nodding.com.cn/suoju/.
[2]徐涛,罗武胜,吕海宝,等.地下定向钻进姿态测量系统的设计[J].中国惯性技术学报,2004,12(2):5 -8.
[3]洪嘉振,杨长俊.理论力学.北京:高等教育出版社,2008:35-36.
猜你喜欢
起重运输机械(2021年21期)2021-11-24
铁道科学与工程学报(2021年1期)2021-02-26
制造技术与机床(2019年11期)2019-12-04
福建交通科技(2019年3期)2019-07-15
专用汽车(2018年10期)2018-11-02
中国铸造装备与技术(2017年3期)2017-06-21
电气化铁道(2017年1期)2017-04-16
大连理工大学学报(2016年6期)2016-12-08
通信电源技术(2016年1期)2016-04-16
深圳职业技术学院学报(2015年5期)2015-11-30
