
单轴微机械热对流加速度计温度场分析
2012-07-14 07:57汪荣青胡俊强李顶根
中国测试 2012年2期
郭 伟,汪荣青,胡俊强,李顶根
(1.中船重工集团公司第七〇一研究所,湖北 武汉 430064;2.浙江机电职业技术学院,浙江 杭州 310053;3.华中科技大学,湖北 武汉 430074)
0 引 言
加速度计通过一定的测量手段可获得加速度值,诞生于二战期间的德国,受到世界各国尤其是西方发达国家的高度关注。由于航空、航海和航天领域对惯性测量元件的需求,各种加速度计应运而生,在随后几十年被广泛应用于通用航空、车辆控制、高速铁路、机器人、探矿等诸多领域[1]。
传统加速度计的设计思想是在加速度计中放入固体质量块,通过测量固体质量块的加速度来测量系统的加速度,但是这种加速度计容易失效,能够承受的冲击应力十分有限。1996年12月美国一项专利对微机械热对流加速度计提出了设想,以气流质量团代替传统设计中的固体质量块来测量系统加速度。微机械热对流加速度计以温度为测量和分析对象,以较为成熟的微机械加工为基础,不仅加工制造工艺简单、成本低、尺寸小、质量轻、结构紧密,而且稳定性高、可靠性好、灵敏度较佳。可应用于汽车技术[1]、惯性制导、GPS[2]以及虚拟游戏机等诸多领域,具有广泛的市场前景。
1 工作原理、制造工艺与结构设计
1.1 工作原理
微机械热对流加速度计下半部分的结构简图如图1所示。
构成热对流加速度计的基本元素有:1个加热元件,1对热敏元件,单晶硅腔体,气体介质和外部电路。加热元件通电发热,离加热元件近的气体吸热升温快,离加热元件远的气体吸热升温慢,各处气体介质因受热不均而产生密度差,气体介质在空腔内做自然对流运动。

图1 微机械热对流加速度计结构简图
当沿热对流加速度计敏感方向(x轴方向)施加的加速度为0时,由于加速度计内部结构布置(六面体腔型热对流加速度计剖面图如图2所示)严格对称,气体介质在空腔内做对称的对流运动,气体介质和温度场在空腔内的分布也是对称的,因此对称布置的热敏元件探测到的温度相同。

图2 微机械热对流加速度计结构剖面图
当沿x轴方向施加加速度a(a≠0)时,气体介质能迅速感受到加速度而在空腔内重新分布,温度场的分布随之而发生变化,热敏元件探测到的温度会有差异。图3中实线表示没有施加加速度时,测量平面上各处温度的分布情况;虚线表示施加了加速度时,测量平面上各处的温度分布情况。
实际测量时,是将热敏元件的温度差ΔΤ通过合适的算法来间接求取系统加速度大小。求解的精度与加速度计的结构设计及加工工艺密切相关。
1.2 结构设计

图3 微机械热对流加速度计工作原理图
六面体腔型微机械热对流加速度计的结构剖面图如图2所示,整个加速度计封装在10mm×5mm×5 mm的硅壳内,内部空腔尺寸设计为2 000 μm×400 μm×1 500 μm,1 500 μm 为空腔深度,加热元件和热敏元件的宽度分别设计为50 μm和25 μm,厚度设计为2μm,气体介质假定为具有理想气体性质。加热元件和热敏元件布置在同一水平线上,其水平中心线距空腔底面750μm,加热元件布置在空腔的中心位置,热敏元件对称布置,布置的具体位置由后面的数值分析结果决定。
2 温度场分析
2.1 腔体自然对流方程
为了对空腔内气体的对流换热进行分析,首先要建立起空腔内气体介质所遵循的自然对流方程。热对流加速度计尺寸很小,空腔内气体介质的流动为层流自然对流。
热对流加速度计的加热元件、热敏元件的宽度和厚度相对于空腔尺寸较小,在分析过程当中,可以将分析模型简化为二维模型[3-4]。腔体内气流稳态自然对流方程包括[5-6]:
(1)连续性方程

取气体介质为均质不可压缩流体时,连续方程可以简化为

(2)水平方向和竖直方向上动量方程
水平方向上动量方程为

竖直方向上动量方程为

(4)状态方程

在式(1)~式(6)中:
▽——微分算子

t——时间;
ν0——速度向量;
u、ν——x、y方向的速度分量;
ax,ay——x、y方向的加速度分量;
ρ,p,T——密度、压强和绝对温度;
cp,λ,μ——定压比热容、导热系数和动力粘度;
R——理想气体常数。
2.2 边界条件
在加热元件通电功率为45mW左右时,整个模型可以简化为等温壁面方腔模型,加热元件壁面温度为573K[3-4],空腔壁面温度为373K。
由于是简化模型,空腔中气体具有理想气体性质,定压比热容、导热系数和动力粘度取为平均温度473K时的参数[7-8]。
2.3 腔体内温度场分析
在汽车安全系统等领域应用热对流加速度计时,加速度计的测量范围通常在±50g范围之内。在下列分析过程中,以作为代表性的 0g,1g,10g,25g,50g分别作为输入的加速度,采用数值分析的方法获取腔体内的温度场分布。
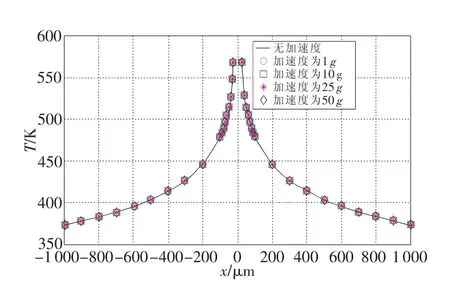
图4 不同加速度工况下测量平面上各处温度分布
由于腔体内气体介质在外界加速度的作用下温度变化值与绝对温度值相比较小,在外界输入0g,1g,10g,25g,50g 5种加速度工况下测量平面上各处温度的分布几乎重合,如图4所示。
在外界输入 0 g,1 g,10 g,25 g,50 g 5 种加速度工况下测量平面上各处温度分布值如表1、表2所示。
基于表1和表2数据,可求取对称布置的热敏元件的温差ΔΤ,如图5所示。ΔΤ实质上反映了加速度计的灵敏度,ΔΤ越大,在相同加速度输入的情况下,加速度计感受到的温差越大,信号输出越明显。
图5中4条曲线在同一区间达到最大值,这为微机械热对流加速度计的加工提供了便利和依据,热敏元件在该区间内布置时,任何工况下,加速度计都具有最高的灵敏度。
图5表明加速度计内热敏元件与加热元件的最佳距离区间为[425 μm,450 μm],在此区间加速度计具有最高的灵敏度。
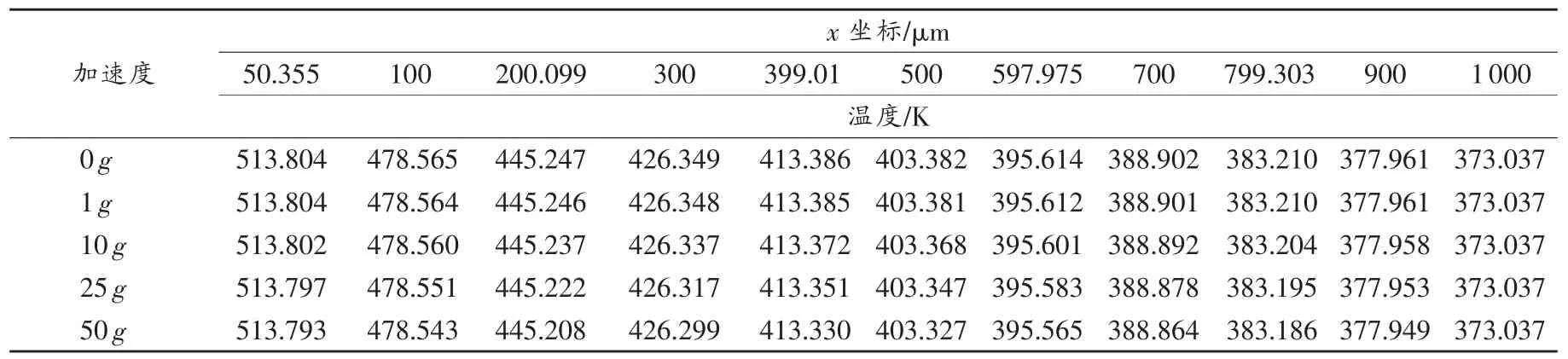
表1 测量平面正半轴各处温度分布值

表2 测量平面负半轴各处温度分布值

图5 两热敏元件在不同加速度下的温差

图6 区间[425μm,450μm]两热敏元件温差
区间[-450μm,-425μm]、[425μm,450μm]内温度分布已知,故得到区间[425μm,450μm]内,对称布置的热敏元件的温差ΔΤ与位置坐标关系曲线如图6所示。
图6表明当加速度计具有最高灵敏度时,热敏元件与加热元件的距离约为437μm,最佳距离区间为[430μm,440μm]。
3 结束语
采用“牺牲层”技术和Si-SiO2SiO2-Si键合技术设计了六面体腔型热对流加速度计的加工制作流程,基于结构特点采用二维简化模型进行数值求解,分析结果表明:加速度计空腔内气体介质在无加速度输入时的温度分布严格对称,而在有加速度输入时温度分布的特点并不与加速度大小相关;当热敏元件与加热元件的距离约为437μm时,加速度计具有最高的灵敏度。
虽然数值分析得到的温差ΔΤ并不大,但加速度计的最佳距离区间[430μm,440μm]并不受影响,这表明六面体腔型热对流加速度计的精度相对较低,但温度分布的特点具有代表性。数值求解的精度可以进一步提高,这需要建立更为真实的模型,气体介质的性质可以进一步优化,而且热对流加速度计的特性也与气体介质种类、气体压强、空腔尺寸等相关,这就需要更深一步的研究。
[1]董景新.微惯性仪表——微机械加速度计[M].北京:清华大学出版社,2002:1-4.
[2]李立杰,梁春广.微机械热对流加速度计[J].半导体学报,2001,22(4):465-468.
[3]刘广玉,樊尚春,周浩敏.微机械电子系统及其应用[M].北京:北京航空航天大学大学出版社,2003.
[4]罗小兵.微惯性流体器件中的流动和传热及其工程应用[D].北京:清华大学,2002:14-18.
[5]许国良,王晓墨,邬田华,等.工程传热学[M].北京:中国电力出版社,2005:68-76.
[6]赵汉中.工程流体力学(Ⅰ)[M].武汉:华中科技大学出版社,2005:41-46,123-125.
[7]Mailly F,Martinez A,Giani A,et al.Design of a micromachined thermal accelerometer:thermal simulation and experimental results[J].J Microelectronics,2003(34):275-280.
[8]Mailly F,Giani A,Martinez A,et al.Micromachined thermalaccelerometer[J].Sensorsand ActuatorsA,2003(103):359-363.
猜你喜欢
东北农业大学学报(2022年11期)2022-12-27
轻工学报(2022年4期)2022-08-12
中国特种设备安全(2022年1期)2022-04-26
装备制造技术(2020年11期)2021-01-26
中国惯性技术学报(2019年1期)2019-05-21
中国核电(2017年2期)2017-08-11
中国惯性技术学报(2017年1期)2017-06-09
发明与创新·中学生(2017年1期)2017-01-20
探测与控制学报(2015年4期)2015-12-15
汽车维修与保养(2015年8期)2015-04-17
