
重型车辆侧翻预警技术现状及研究进展
2012-07-13 06:32赵志国
黑龙江交通科技 2012年1期
赵志国
(淮阴工学院交通学院)
重型车辆侧翻预警技术现状及研究进展
赵志国
(淮阴工学院交通学院)
提高车辆主动安全性和操纵稳定性是提高公路运输安全和减少交通事故的重要手段。简述了车辆侧翻预警方法及系统的工作原理;详细阐述了目前国内外车辆侧翻预警研究现状;指出了车辆侧翻预警系统存在的问题,并提出侧翻预警系统未来发展方向,为车辆侧翻预警算法及控制系统的研究奠定了基础。
重型车辆;侧翻预警;研究进展
随着我国国民经济的高速发展,以及国家对高等级公路的快速修建,高效率、高可靠性、低成本、快速安全的重型车辆的需求大幅增长。2010年,我国重型车辆年销量突破100万辆,重型车辆年销量已占世界重型车辆总销量的一半以上,增长速度堪称世界之最。
重型车辆具有重心高、质量和体积大、轮距相对于质心高度过窄等特点,极易发生侧翻事故。侧翻事故中,非碰撞事故占10%,而重大非碰撞事故中的90%是侧翻事故,对经济发展和人民生命财产造成了重大损失。因此,研究、探索和主动控制重型车辆行驶安全性和操纵稳定性,已成为各国学者、高等院校及科研单位所关注的重要课题。
1 侧翻预警方法及系统工作原理
车辆侧翻是指车辆在行驶过程中绕其纵轴线转动90°或更大的角度,导致车身与地面相接触的一种危险的侧向运动。车辆侧翻可分为两种:一种是曲线运动引起的侧翻,即车辆行驶过程中产生侧向滑移,与地面上的障碍物侧向撞击而将其“绊倒”;一种是绊倒侧翻,即车辆在道路上行驶时,侧向加速度超过门限值,使内侧车轮的垂直反力为零而引起的侧翻。
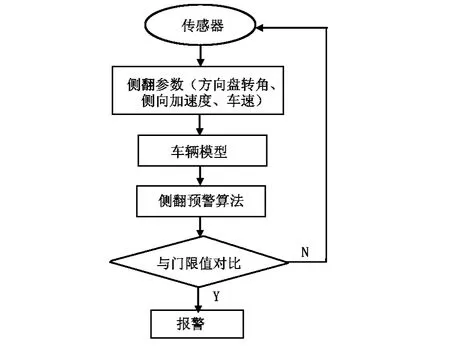
图1 车辆侧翻预警系统原理
图1为车辆侧翻预警系统原理图,侧翻预警器对方向盘转角、侧向加速度、车速等参数进行检测,根据车辆模型,运行侧翻预警算法。若侧翻算法的门限值大于设定值,报警系统给出预警信号,驾驶员根据预警信号采取相应的防侧翻措施来控制侧翻。
2 重型车辆侧翻预警研究现状
如何提高重型车辆行驶安全性及操纵稳定性是现代汽车研究的重要课题之一,国内外各大汽车公司、高等院校及科研院在重型车辆主动安全及稳定性控制领域进行了大量的研究。
2.1 国外研究现状
当前,国际上对重型车辆的侧翻动力学研究,无论从静态、准静态和动态的计算机模拟,还是侧翻试验测试,都有深入的研究。美国、加拿大、英国和日本等国诸多学者为车辆侧翻预警理论和实践的研究做出了重要贡献,取得了很多成果。
传统的侧翻预警算法大都是基于侧向加速度或侧倾角极限值。1990年Rakheja提出侧翻安全预警监控算法,以车辆静态转向内侧车轮离地时的侧向加速度作为临界侧翻门限值,达到侧翻门限值则触发警示。
传统预警方法精准性较差,基于前人在侧翻机理上的研究,1990年Preston-Thomas提出用横向载荷转移率(LTR)作为车辆侧翻危险指标,两侧轮胎的载荷相等时LTR则为0,一侧轮胎离地时LTR为1,即横向加速度达到临界侧翻门限值。自此之后很多研究以LTR作为判定标准。1998年Dunwoody等人提出了一个以LTR作为判断依据的侧翻预警方法,并申请了专利。2003年,韩国的Dongyong Hyun建立了重型半挂车侧翻预警模型,以LTR值判断侧翻程度。该模型考虑了悬架和轮胎的非线性特性,利用参数辨识技术,辨识影响LTR值的参数,使预测模型接近于实车,能够更加准确预测半挂车的侧翻稳定性。
除LTR外,国外学者提出了很多侧翻预警方法,Nalecz等人提出一种基于能量计算的侧翻判定方法(RPER),试验证明,该方法可以准确地进行侧翻预警。
1997年,P.J.Liu研发了一套车载潜在侧翻危险警示装置,建立了侧翻失稳RSF评价指标,研究表明,侧翻失稳评价指标RSF与侧向加速度和侧倾角有关系。
2001年,Chen和 Peng提出了一种基于 TTR(Time To Rollover)侧翻时间预测的侧翻动态预警算法,该算法简单,有较好的实用性。同时,Chen和Peng用神经网络技术提高了TTR值的精度。
2003年,Eger和Kiencke建立了车辆侧翻时间序列,给出了侧倾角速度和侧倾角之间的数学关系,规定了车辆稳定边界。
2008年,美国俄亥俄州立大学的H.Yu提出一种基于实时TTR矩阵作为侧翻危险判据的侧翻预警算法,并使用卡尔曼滤波技术提高TTR矩阵的精度,试验证明,该方法比较实用,能够有效的预测车辆侧翻状态。
2.2 国内研究现状
国内部分高校,如吉林大学、南京航空航天大学和重庆交通大学等高校进了大量的研究工作,取得了一定的成果。
2007年,南京航空航天大学的张先奎提出了一种基于姿态监测的TTR侧翻预警方法和双飞轮侧翻控制方法,用Simulink对其进行了仿真分析。结果表明,侧翻预警器能够提供侧翻预警信息,对车辆侧翻能够进行有效的控制。
2008年,南京航空航天大学的金智林提出了一种基于动态因子的车辆侧翻预警算法。试验表明,该算法能够精确地算出车辆侧翻时间值,判断车辆侧翻的危险状况。
2008年,吉林大学的朱天军提出了一种基于回路传输恢复技术的LQG主动侧倾控制算法。仿真结果表明,该算法有效提高了车辆的侧翻稳定性。
2008年,吉林大学的宗长富在回路传输恢复技术控制算法上,建了全局增度控制的全状态反馈控制器。仿真结果,该算法能有效提高车辆侧倾稳定性。
2010年,重庆大学的连金江以TTR预警算法为基础,提出了混凝土搅拌车侧翻预警算法,并对其进行了仿真分析。结果表明,该预警算法具有提前预测侧翻的功能。
2010年,淮阴工学院的夏晶晶提出了一种基于模型预测的侧翻主动控制方法。仿真结果表明,该方法能够有提高车辆的侧翻控制能力。
2011年,吉林大学的朱天军在传统TTR预警算法的基础上,提出了一种基于改进TTR重型车辆侧翻预警算法,并进行了实车试验。结果表明,该方法可以对车辆侧翻进行提前预警。
3 重型车辆侧翻预警研究现状
综上所述,目前国内外重型车辆侧翻预警技术方面的研究主要存在以下问题。
(1)传统的车辆预警算法多数属于静态预警系统,不能动态精确预测侧翻程度。
(2)传统的侧翻预警算法需要精确获得载荷、重心、加速度等参数,当参数变化较大时,不能准确预测侧翻状况。
通过上述分析可知,建立精确的车辆动态侧翻预警模型,探索新的动态预警方法,能够早期发现潜在的侧翻危险,为防侧翻稳定控制奠定基础。
4 结论
重型车辆侧翻已成为影响道路交通安全的重要问题,车辆侧翻对我国经济发展和人民生命财产造成了重大损失。因此,研究开发新型重型车辆侧翻预警算法及控制技术,提高车辆行驶的主动安全性具有重要的意义,将会产生重要的经济效益。
[1]黄杰燕,刘坤,熊毅.车辆侧翻警示及控制系统的现状研究[J].轻型汽车技术,2011,(1/2):16-19.
[2]徐延海.基于主动转向技术的汽车防侧翻控制的研究[J].汽车工程,2005,(5):518-521.
[3]张不扬,宗长富,王德平.车辆侧翻预警研究现状与关键技术[J].汽车技术,2010(8):27-31.
[4]张先奎.基于姿态监测的汽车侧翻预警及控制研究[D].南京:南京航空航天大学,2007.
[5]金智林.运动型多功能汽车侧翻稳定性及防侧翻控制[D].南京:南京航空航天大学,2008.
[6]朱天军,宗长富.基于LQG/LTR的重型半挂车主动侧倾控制仿真分析[J].系统仿真学报,2008,20(2):476-479.
[7]宗长富,朱天军.基于全局增益调度控制的重型半挂车主动侧倾控制算法[J].中国机械工程学报,2008,44(10):138-144.
[8]连金江.混凝土搅拌模型车防侧翻预警控制系统硬件设计及软件开发[D].重庆:重庆交通大学,2010.
[9]夏晶晶,常绿,胡晓明.基于模型预测的重型车辆侧翻主动控制[J].农业工程学报,2010,26(9):176-180.
[10]朱天军,宗长富.基于改进TTR算法的重型车辆侧翻预警系统[J].机械工程学报,2011,47(10):88-94.
U461.6
A
1008-3383(2012)01-0089-01
2011-08-20
赵志国(1977-),男,博士研究生,讲师,主要从事车辆动态仿真与控制方面的研究。
江苏省高校自然科学研究计划项目(09KJB580001)。
猜你喜欢
中国机械工程(2022年21期)2022-11-21
中国机械工程(2022年7期)2022-04-20
中国机械工程(2021年23期)2021-12-15
北京航空航天大学学报(2021年4期)2021-11-24
数据采集与处理(2021年4期)2021-09-20
民用飞机设计与研究(2020年4期)2021-01-21
河南科学(2020年3期)2020-06-02
电子制作(2019年11期)2019-07-04
中国交通信息化(2017年12期)2017-06-06
光学精密工程(2016年3期)2016-11-07
