
水声定位标定系统水下基准位置不确定度分析
2012-07-12 05:56刘百峰
舰船科学技术 2012年5期
刘百峰,罗 坤,马 一,李 斌
(中国人民解放军91388部队,广东 湛江 524022)
水声定位标定系统水下基准位置不确定度分析
刘百峰,罗 坤,马 一,李 斌
(中国人民解放军91388部队,广东 湛江 524022)
水声定位标定系统中水下基准(模拟目标声信号)位置的测量精度直接影响到对水声定位系统定位误差的考核。通过对水下基准中心位置不确定度的分析,为系统减小水声定位系统测量误差提供了理论参考,经海试证明该不确定度分析方法对提高水声定位系统标定精度有效。
水声定位;精度标定;不确定度
0 引言
水声定位系统是利用水声应答测距信号对目标进行测量的声呐系统[1]。水下定位精度是水声跟踪定位测控系统的关键战技指标之一,但由于海上基准点的建立比较困难,因而一直以来都是沿用理论分析精度,尚无有效的测试手段及相应的测试系统通过试验测试来标定其实际定位精度。如果要在海上动态验证水声定位系统的定位精度,就必须有1套高精度的水声定位标定系统。
水声定位标定系统(简称标定系统)是一种通用的对水声定位系统的测量精度进行标定的系统[2]。该系统以船载模拟目标声源作为合作信标,结合星站GPS及姿态监测装置建立水下动态基准点,用于标定水声跟踪定位装备在接近水面条件时的定位精度,为水声跟踪定位装备性能评估以及试验结果评估提供依据。其水下基准(船载模拟目标声源)位置精度直接影响到水声定位系统的定位误差计量,因此精确分析和解算水下基准的误差具有重要的工程意义。文章通过对高精度水声定位标定系统的水下基准测量精度的不确定度进行分析[3],计算出不同误差因素对标定精度的影响,为工程应用提供了理论参考,通过实验室仿真及海试验证,方法可靠。
1 系统工作原理
水声定位标定系统主要由船载升降机构、船体航向姿态测量仪、高精度动态DGPS接收机、综合数据处理系统、多系统兼容的模拟目标声信号源及宽带换能器等部分组成。
多系统兼容目标模拟器在同步信号的作用下通过水声换能器发射与各水声跟踪定位装备相应的模拟目标声信号,同时记录发射时刻的DGPS位置(经纬度)、船的航向、纵横摇角度以及换能器布放深度,并将上述数据传送至综合数据处理分系统,由该系统计算出发射时刻发射换能器的声中心位置。

图1 水声定位标定系统结构Fig.1 The structure of underwarter acoustic positioning demarcate system
各水声跟踪定位装备对模拟目标声信号进行定位测量,同时将各设备的定位测量结果通过网络接口或其他专用接口传送至水声定位标定系统中的综合数据处理分系统。该系统将收到的定位测量结果与发出模拟目标声源的换能器基准位置进行比对处理,从而得出各水声跟踪定位装备的海上实际定位精度指标,事后完成多套水声跟踪定位系统的定位精度修正,协助被标定设备进一步提高其跟踪定位测量精度。综上可见,水声定位标定系统中发射声源的位置精度直接影响到该系统的标定精度。
2 系统模型及影响系统精度的因素
气动升降机构安装在有海底阀的船舱内,升降杆下方安装宽带换能器,升降杆与海底阀水密连接。使用时打开海底阀,气动下降升降杆,使安装在升降杆上的换能器通过海底阀伸出船底约1 m[4]。DGPS的定位天线应安装在一个恰当的位置,使定位天线与宽带换能器的水平距离尽量短,例如使定位天线与宽带换能器的水平距离小于10 m。DGPS采用星站式差分GPS,通过实时动态差分定位技术实现精度可达15 cm的高精度定位[5]。
船体航向姿态测量仪在安装时其基准应与船的首尾线平行,同时校准其水平。通过测量或根据船的设计图纸可得出升降机构的安装点(即换能器的安装点)在船体坐标系的位置,同时DGPS定位天线在船体坐标系的位置也可以通过测量确定。由于知道升降机构的安装点与DGPS定位天线安装点的相对位置,同时船的航向由船体航向姿态仪给出,这样就可以计算出升降机构安装点的地理位置(经纬度)。通过深度传感器可知道发射换能器的布放深度,于是基准位置(合作信标)的坐标就惟一精确地确定了。通过船体航向姿态仪还可以测量出船的纵倾横摇角,就可以对基准位置的坐标作进一步修正。

图2 系统在船上的安装示意图Fig.2 The sketch map of system fix on the ship
升降杆的震动摆幅、星站式GPS的定位误差、航向姿态测量仪的航向姿态测量误差、深度传感器的深度测量误差以及安装时各部件初始位置的测量误差是模拟目标声源中心位置定位不确定度的因素。
3 罗经和GPS的误差影响[6]
在高精度定位标定系统中,由高精度DGPS、罗经和姿态传感器对船体的坐标、姿态与航向进行测定。由于星站式GPS天线和声源中心位置在安装时有可能不能安装在同一条垂线上(如图3),水下基准与GPS天线间存在一个水平距离R(m),罗经的航向测量误差就会对水下基准的真实位置的计算带来偏差。以高精度GPS天线为坐标原点建立大地坐标系,设船的航向为φ,罗经航向测量误差为Δφ,GPS与水下基准的水平距离为R(m),GPS与水下基准都安装在船的首尾线上。设水下基准的真实位置为A,由于罗经存在航向测量误差,系统测得水下基准的位置为B,如图3所示,2点的距离通过计算为:

由式(1)可知,如果把GPS的天线与定位标定系统的水下基准安装在同一点上,那么高精度定位系统由罗经和GPS引起的误差只是GPS的定位误差。如果取R=10 m,罗经的测向误差为0.5°,那么高精度定位标定系统由罗经和GPS引起的误差将比GPS的误差增大87.27 mm,因此只要控制高精度定位标定系统水下基准与GPS基点的水平距离,则可降低对罗经航向测量精度的要求。

图3 罗经测向误差示意图Fig.3 The sketch map of compass measure direction error
4 纵倾、横摇角测量误差影响
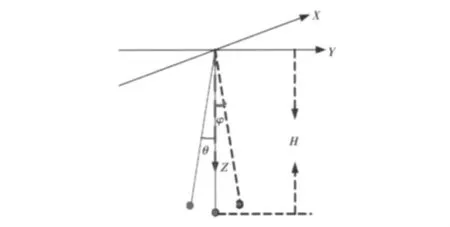
图4 姿态误差示意图Fig.4 The sketch map of gesture measure error
下面分析姿态的测量误差对模拟目标声源中心位置定位不确定度的影响[7]。由于存在纵倾、横摇角的测量误差,所以想要完全补偿纵倾、横摇角变得不可能,其误差也会影响模拟目标声源中心位置的测量,如图4所示。
以GPS天线安装点为原点,船首向为y轴,船右向为x轴建立艇体坐标系OXYZ。设纵倾角为θ,横摇角为φ。无纵倾横摇时模拟目标声源中心位置的坐标为(x″,y″,z″),有纵倾横摇时模拟目标声源中心位置的坐标为(x″,y″,z″),则二者存在关系式:

设纵倾测量误差角为Δθ,横摇测量误差角为Δφ,考虑姿态测量误差后的模拟目标声源中心位置的坐标为(x″,y″,z″),则坐标(x″,y″,z″)与坐标(x,y,z)存在关系式:

假设模拟目标声源中心位置到GPS天线的最大垂直距离为10 m(z=10),纵倾和横摇角的最大测量误差Δθmax= Δφmax=0.5°,代入式(2)和式(3),得:
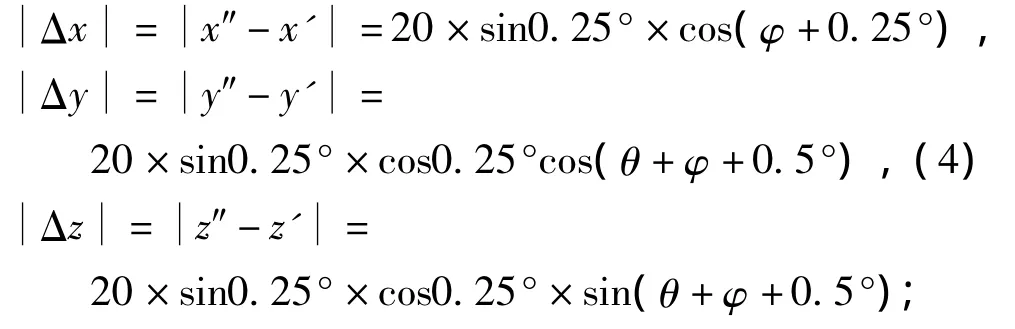
距离误差为

因为 cos(φ+0.25°)<1,所以 ΔRmax=0.125 m。
通过上述分析可知,若声源中心位置与GPS天线间的水平距离小于10 m,测向误差为0.5°,那么声源中心位置由航向和GPS引起的误差将比GPS的误差大0.087 m;若声源中心位置到GPS天线的垂直距离小于10 m,纵倾和横摇角的测量误差为0.5°,那么经纵倾和横摇后的位置偏差小于0.125 m。
5 陆地模型建立
为了验证以上误差对该系统的影响,在陆上模拟了目标的各种方位姿态,对星站GPS和声中心基准点的距离用米尺作了精确测量(见图5)。数据处理系统实时接收平台上面的DGPS、罗经、姿态传感器的数据,计算出模拟合作信标经纬度,同时利用中分纬度法计算动态模拟基准跟DGPS之间的水平距离。与米尺所测模型结果相对比。在测试过程中总共测量了13个状态,每个状态用数据处理系统测量大约100个点,把测量的数据算术平均,计算出模拟合作信标跟DGPS之间的水平距离;再利用米尺测量出DGPS和模拟合作信标在地面投影点的距离。

由表1可见,模拟目标声源的声中心位置坐标的定位平均误差为4.3 cm,完全符合高精度水声定位标定系统的精度要求[8]。
6 海试结果分析
图6是在南海某海域高精度水声定位标定系统对某型导航定位系统的精度进行标定,其中1#~4#应答器构成了海底应答器阵。良好海况,海深60 m,声速1 500 m/s,模拟目标声源6 m,系统同步周期6 s。目标船以小于5 kn航速在阵中低速航行。

图6 海试结果Fig.3 The result of examination on the sea
海试结果图中,水声标定系统的导航结果与目标船载的GPS轨迹几乎完全重合。证明水声定位标定系统的精度可靠。
7 结语
本文通过对水下基准位置不确定度分析计算,设计了符合水声定位标定系统精度的模型,陆地模型仿真和海上精度标定试验均表明,该精度标定系统能有效地标定出水声定位系统的精度,提高了水声定位系统测量数据的科学性,具有良好的工程推广应用价值,对其他水声定位系统的精度标定具有借鉴意义。
[1]李启虎.水声学研究进展[J].声学学报,2001,26(4):295-301.
LIQi-hu.Advancesofresearch work in underwater acoustics[J].Acta Acustica,2001,26(4):295 -301.
[2]李守军,包更生,吴水根.水声定位技术的发展现状与展望[J].海洋技术,2005,24(1):130-135.
LI Shou-jun,BAO Geng-sheng,WU shui-gen.A practical overview and prospect of acoustic positioning technology[J].Ocean Technology,2005,24(1):130 -135.
[3]KUSSAT N H,CHADWELL C D,ZIMMERMAN R.Absolute positioning of an autonomous underwater vehicle using GPS and acoustic measurements[J].IEEE Journal of Oceanic Engineering,2005,30(1):153-164.
[4]杨道军,等.船底运动小直径圆柱受力挠曲分析[J].海洋工程,2006,24(4):49-55.
YANG Dao-jun, etal. Analysisofforce on and deformation of a small moving cylinder fixed under the bottom of the ship[J].The Ocean Engineering,2006,24(4):49-55.
[5]陈子,许枫.GPS时钟同步在水下定位系统中的应用[M].微计算机应用,2008,29(8):86-89.
CHEN Zi,XU Feng.GPS clock synchronization using in underwater positioning system [J].Microcomputer Applications,2008,29(8):86 -89.
[6]蔡艳辉,杨新红.差分GPS水下定位系统的解析法分析[J].大地测量与地球动力学,2008,28(6):101-106.
CAI Yan-hui,YANG Xin-hong.Underwater positioning system's baseline network analyzing based on analytical method[J].Journal of Geodesy and Geodynamics,2008,28(6):101-106.
[7]刘林泉.水声综合测控系统关键技术研究[D].哈尔滨:哈尔滨工程大学,2008.85 -96.
[8]王泽民,罗建国,陈琴仙,田力.水下高精度立体定位导航系统[J].声学与电子工程,2005,(2):1-3.
The uncertainty analysis of the underwater benchmark on underwarter acoustic positioning demarcate system
LIU Bai-feng,LUO Kun,MA Yi,LI Bin
(No.91388 Unit of PLA,Zhanjiang 524022,China)
In acoustic positioning system,the measuring accuracy of the underwater benchmark position(the simulation of object acoustic signal)directly affect evaluation of the position error of acoustic positioning system.Through analysising uncertainty of the underwater benchmark position,provide theoretical reference for the system to reduce measurement error of acoustic positioning system.The sea test results proved that the uncertainty analysis method is effective to improve acoustic positioning system calibration precision.
underwater acoustic positioning;precision demarcate;uncertainty
U666.7
A
1672-7649(2012)05-0087-04
10.3404/j.issn.1672-7649.2012.05.020
2011-11-28;
2012-01-04
刘百峰(1978-),男,硕士研究生,主要研究方向为水声测控技术。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年11期)2022-07-15
红领巾·萌芽(2022年3期)2022-03-13
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
电子制作(2019年23期)2019-02-23
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
电子制作(2016年19期)2016-08-24
探测与控制学报(2015年4期)2015-12-15
