
混合动力汽车驱动防滑的联合仿真
2012-07-09 02:32马明生都翔云高军丰
兵器装备工程学报 2012年12期
马明生,都翔云,高军丰
(河南省安阳市71352 部队 a.70 分队;b.67 分队,河南 安阳 455112)
绿色环保已成为现代汽车工业发展的一大主题,混合动力汽车作为汽车工业解决节能和环保问题的一项新技术,目前已成为汽车研究和发展的重要方向。
ASR 作为车辆主动安全技术之一,能防止驱动轮的过度滑转。传统燃油汽车ASR 一般采用发动机输出转矩控制和制动力矩控制[1-3]。随着混合动力汽车的面世,其ASR 开始受到研究者的关注。文献[4,5]以电机输出转矩为控制方式对混合动力汽车ASR 进行了研究,但是没有加入液压制动系统协调控制。
在此针对混合动力汽车的特点,在AMESim 平台中建立液压制动系统模型并通过接口设置和Matlab/Simulink 中模型进行无缝连接,建立混合动力汽车ASR 联合仿真模型并制定协调控制策略,分别在均一路面和分离路面上对混合动力汽车ASR 进行了联合仿真分析。
1 汽车动力学模型
1.1 发动机和电机模型
在混合动力汽车ASR 的研究中,我们关心的是动力系统的输入和输出,对其内部过程可以尽量简化。因此,在建立发动机和电机模型的时候采用实验建模法。
通过台架试验获得发动机和电机稳态数据,采用一阶惯性环节建立相应的动态输出转矩模型[6-7]

式中:Ms为发动机或电机稳态转矩;T1、T2为时间常数;s 为拉普拉斯算子。
1.2 整车模型
整个车辆作为一个整体,是一个多自由度的系统。根据研究需要,将整车简化成7 自由度模型,即车身的纵向平移运动,横向平移运动以及绕Z 轴的横摆运动3 个自由度和4个车轮的旋转自由度[8],如图1 所示。
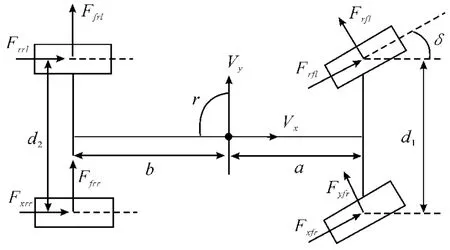
图1 整车动力学模型
分析时做如下假设:固结于汽车上的动坐标系原点与汽车质心重合;忽略悬架作用,认为汽车没有垂直运动;忽略转向系统影响,直接以前轮转角作为输入,并认为左右转向轮转角相同;汽车绕Y 轴的俯仰角以及绕X 轴的侧倾角为零;各轮胎的机械特性相同。
1.3 液压制动系统模型
车辆驱动防滑是一项主动安全技术,液压制动系统对目标车轮采取的是主动干预,高压制动液由电机带动液压泵建立并储存于高压蓄能器中,因而实际制动系统中的制动踏板、制动主缸和真空助力装置等部件不参与ASR 的工作。ASR 只对驱动轮进行制动压力的干预,本文研究的是前轮驱动型混合动力汽车,因此ASR 液压制动系统模型中只需建立驱动轮部分。根据上述建模过程,在AMESim 平台中建立的ASR 液压制动系统模型如图3 中所示。
2 联合仿真平台
AMESim 软件是一款用于液压/机械系统建模、仿真和动力学分析的优秀软件,可以对复杂的液压/机械系统进行精确的建模和仿真。因此,采用AMESim 软件对车辆液压制动系统进行建模及分析。Simulink 是Matlab 的重要组成部分,是一个进行动态系统建模、仿真和分析的集成软件包。Simulink 借助MatlabB 强大的数值计算能力,能够在Matlab环境下建立系统框图和仿真环境构造模型对象,是当今主流的仿真软件[9]。利用二次开发工具箱,Simulink 能够比较容易的建立强大的控制系统。
联合仿真平台充分利用AMESim 和Matlab/Simulink 在液压系统建模仿真与数值处理能力方面的优势对系统进行仿真分析。既保证了模型建立的精度,又能达到比较好的控制效果。
在Simulink 中通过S-函数来实现软件接口的设置。S-函数是系统函数(System Function)的简称,是用户用指定语言描述的一个非图形化的功能模块。用户可以采用Matlab 语言、C、C++、FORTRAN 等语言来编写S-函数,可以用来描述和实现离散系统、连续系统以及混合系统等模型。S-函数是Matlab 与其他语言的接口,可以接受Simulink 求解器的命令并与AMESim 等软件进行通讯。
在仿真过程中,控制系统要对液压单元的6 个电磁阀和1 个油泵电机进行控制,对两个驱动轮轮缸进行压力的采集,仿真框图如图2 所示。
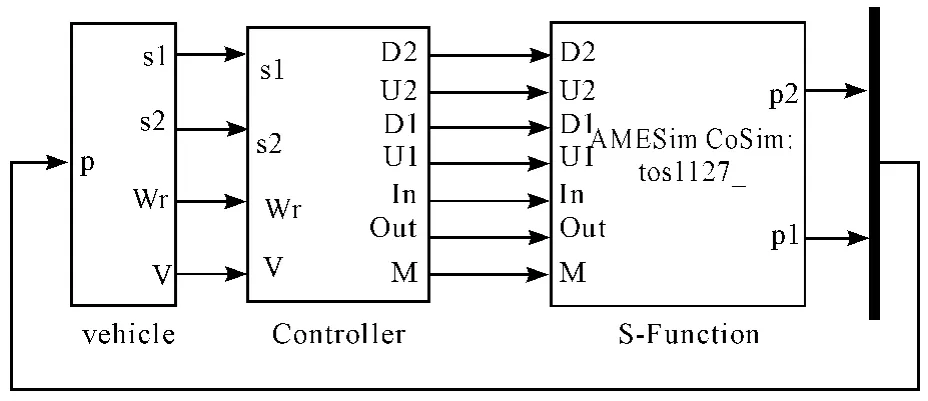
图2 Simulink 中联合仿真接口框图
在AMESim 中,首先要设置VC++作为编译器,然后创建接口模块。采用AMESim 与Simulink 的接口类型中的联合仿真接口界面,联合仿真时,两者各自采用各自的求解器,AMESim 模型被看作时间的离散模块处理。在AMESim 中建立的联合仿真模型如图3 中所示。
3 混合动力汽车ASR 控制策略
混合动力汽车只有在电池SOC 高于下限值时,电机才提供动力,否则,运行在发动机单独驱动模式。
车辆在起步或低速加速行驶时,要求车辆提供较大的驱动力,能迅速提高车速,此时ASR 以最大加速度为控制目标;车辆在中高速加速行驶时(如超车过程等),对车辆的稳定性要求高,此时ASR 以稳定性为主要控制目标。
车辆行驶的路面条件一般有均一路面,分离路面,对接路面和棋盘路面四种,其中棋盘路面可以看出前面3 种路面的综合,而在均一路面和对接路面上车辆左右侧驱动轮受力情况相同,控制相对简单,因此下面以分离路面为典型路面,根据车辆的工作模式和行驶速度制定以下控制策略。
起步或低速行驶时,采取电机、发动机和制动系统协调控制,电机或发动机按照高选原则,制动系统只对低附着一侧驱动轮施加制动力矩;中高速行驶时,采取电机和发动机按照低选原则协调控制。由于电机响应迅速,控制精度高,优先采用电机输出转矩控制,只有当电池SOC 低于下限值或电机输出转矩达不到目标转矩时发动机才介入控制。
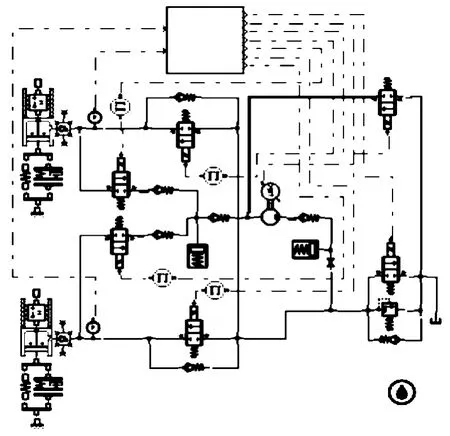
图3 AMESim 中液压模型及联合仿真接口
4 仿真分析
路面条件:右边压紧的冰雪路面,附着系数0.2;左边压紧干土路面,附着系数0. 68,初始车速2 m/s,油门开度100%。
1)电池电量充足,电机辅助驱动。车速小于8 m/s 时,制动系统介入干预,以获得较大的加速度,并且将横摆角速度控制在0.2 以下。当车速超过8 m/s 时,以稳定性主要为控制目标,退出制动控制。
如图4 所示,图4(d)中虚线表示控制后发动机的输出转矩,实线表示控制后电机的输出转矩,其他图4(a)、4(b)、4(c)、4(e)、4(f)、4(g)中则分别表示控制前和控制后相应变量的曲线。由于电机的驱动,初始阶段车速上升明显,但是加速后期由于横摆的影响,车速上升减缓,经过6 s 加速车速由7.45 m/s 增长到8.80 m/s,增长18.1%。在第5 s,车速达到8 m/s,制动干预退出,相应轮缸减压阀打开,增压阀关闭,压力卸载。
2)电池电量不足,电机不参与控制。车速小于8 m/s时,采用制动力矩控制,横摆角速度控制在0.2 以下,以获得较大的驱动力,当车速超过8 m/s 时,以稳定性为主要控制目标,退出制动控制。
如图5 所示,图中虚线和实线分别表示控制前和控制后相应变量的曲线。在2.72 s,驱动轮开始发生过度滑转,制动系统介入干预。对低附侧驱动轮施加制动力矩后,高附侧的驱动轮滑转率有所增长,总的驱动力矩相应增长。在5.96 s,车速达到8 m/s,制动系统退出干预,相应轮缸减压阀打开,增压阀关闭,压力卸载。经过10 s 加速,车速由,10.70 m/s 增长到11.92 m/s,增长11.4%。
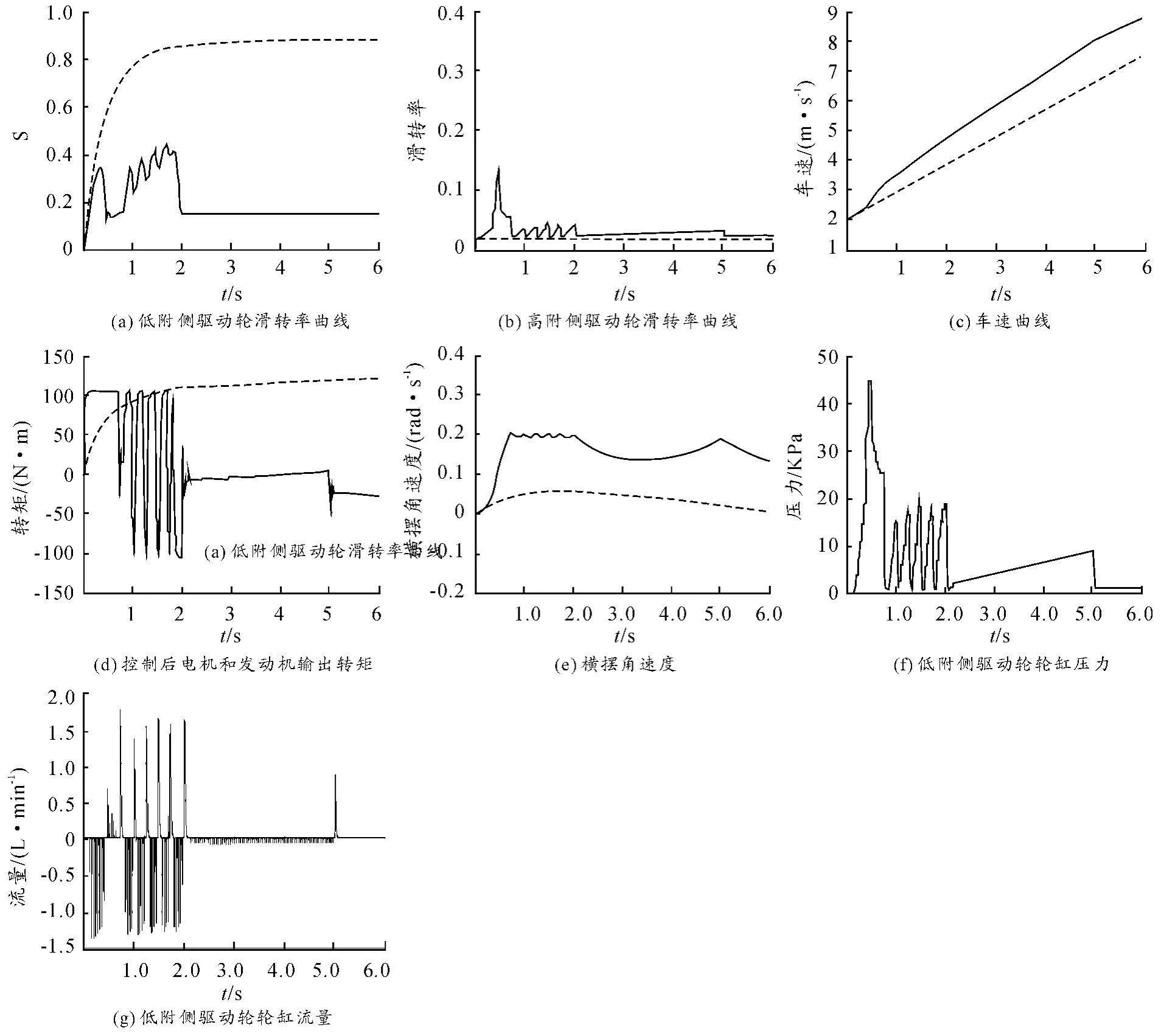
图4 分离附着路面(1)
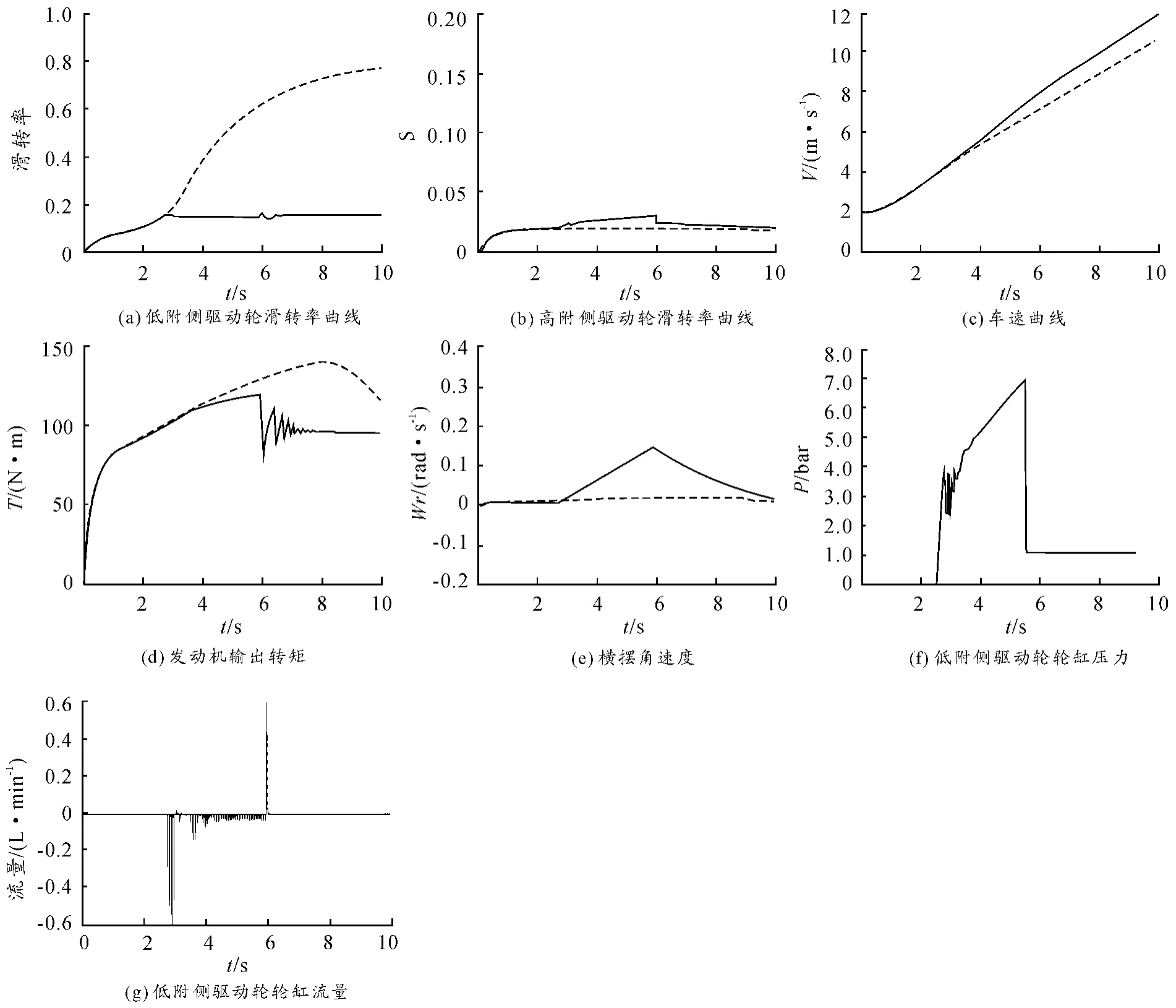
图5 分离附着路面(2)
5 结束语
结果表明,电机响应快、控制精度高的特点明显,结合液压制动系统和发动机控制,在分离路面上能够有效地防止车辆驱动轮的过度滑转。在起步及低速行驶阶段,经过ASR控制后,能充分利用地面附着力,快速提升车速;在中高速行驶阶段,经过ASR 控制后,能缩小两侧驱动轮驱动力的差异,降低车辆横摆角速度,有利于车辆的行驶稳定性。
[1]Huiyi Wang. Hardware-in-the-loop Simulation for Traction Control and the Debugs of its Electric Control Unit[C].SAE Paper,2004-01-2056.
[2]Fedullo T.Delagrammatikas G J.The Traction Control System of the 2011 Cooper Union FSAE Vehicle[C].SAE Paper,2011-01-1108.
[3]赵峰,罗禹贡,韩云武,等.基于工况识别的牵引力分层控制系统研究[J].计算机仿真,2011(8):332-336.
[4]Jianlong Zhang,Deling Chen,Chengliang Yin. Adaptive Fuzzy Controller for Hybrid Traction Control System based on Automatic Road Identification[C]. Proceeding of the 2006 IEEE.International Conference on Automation Science and Engineering.Shanghai,China,October 7-10,2006.
[5]LIN Y F and ANWAR S.A Traction Enhanced On-Demand All Wheel Drive Control System for a Hybrid Electric Vehicle[C].SAE Paper,2007-01-0299.
[6]欧健,熊峰.并联混合动力汽车起步过程TCS 研究[J].重庆理工大学学报,2011(11):1-6.
[7]赵治国,顾军,余卓平.四轮驱动混合动力轿车驱动防滑控制研究[J].机械工程学报,2011(14):85-86.
[8]欧健,王林峰,房占鹏.汽车电子稳定程序模糊控制仿真[J].计算机仿真,2010(7):288-289.
[9]李谨,邓卫华.AMESim 与MATLAB/Simulink 联合仿真技术及应用[J].情报指挥控制系统与仿真技术,2004,26(5):61-64.
[10]任鑫,王亚平. 串联混合动力汽车性能仿真软件设计[J].四川兵工学报,2011(1):82-84.
猜你喜欢
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
中国新技术新产品(2020年4期)2020-05-05
电机与控制学报(2018年9期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
科技创新导报(2016年27期)2017-03-14
