潜射模拟弹筒盖系统柔性支撑降载技术①
2012-07-09 09:11:58王汉平
固体火箭技术 2012年3期
王汉平,杨 鸣,段 磊
(北京理工大学宇航学院,北京 100081)
潜射模拟弹筒盖系统柔性支撑降载技术①
王汉平,杨 鸣,段 磊
(北京理工大学宇航学院,北京 100081)
提出了筒盖系统带空行程的柔性支撑降载方案,基于含相变VOF模型和动网格技术并采用三维对称模型对潜射模拟弹筒口压力场及其对筒盖系统的影响特性进行了建模仿真,对比分析了9种不同空行程组合的仿真数据,获取了筒口压力场的气泡脉动特性、筒盖及其支撑环节的受载特性和筒盖的运动规律,验证了带空行程柔性支撑方案的可行性,同时也得到了便于工程实施的行程组合参数。该结果对于指导筒盖系统降载方案的设计和实施具有重要指导意义。
潜射发射装置;潜射导弹;筒口压力场;VOF模型;多相流;动网格技术;柔性支撑
0 引言
为规避反潜装备的侦察和打击,提高系统快速机动、隐蔽突防、有效威慑的战略能力,潜射弹道导弹的潜射深度指标越来越高,垂直冷发射作为成熟技术还将在新型潜射弹道导弹的发射中继续发挥作用[1]。但该发射方式难以回避的问题是,发射过程中导弹高速出筒之后,弹射筒内高温高压的燃气-蒸汽将会尾随导弹从发射筒内膨胀溢出,并与外界的海水、筒盖系统以及导弹弹体形成复杂的多场质交互耦合,这种耦合的筒口压力场将对筒盖系统造成不利影响,某次试验就曾出现过筒盖系统严重受损的事故[2-3]。针对大深度潜载弹射,为确保导弹出水速度和姿态,可能要求导弹有更高的出口速度,这时筒口压力场对筒盖系统的作用也将更加恶化,因此采取必要的技术手段来有效降低筒盖系统受载就显得尤为重要。
文献[4-5]就针对筒盖系统的柔性支撑进行了仿真研究,并得到了很有价值的结果,但其工程实现却存在一定难度,为进一步向工程实用靠拢,本文提出了一种带空行程的筒盖系统柔性支撑降载方案,并采用三维模型对该方案的降载效果进行了分析,结果表明该方案具有显著的降载效果,可为工程实施提供指导。
1 带空行程的柔性支撑方案设想
根据文献[5-6]可知,潜射弹发射筒筒盖受载过大,柔性支撑方案可以降低筒盖的正载荷,但是负载荷反而会增加,自由铰支方案对正向和负向的降载效果都比较好,但是筒盖摆动的幅度太大,为了达到既能降低筒盖载荷,又能减小筒盖摆动的幅度,本文提出了带有空行程的柔性支撑降载方案。
该方案的基本思想就是借助剪切销锁定筒盖,当筒盖受载足够大之后就剪断剪切销,然后筒盖就在一定的角度范围(如图1中的α1~α2之间)自由摆动,当摆动角度超出范围时,由弹性支撑系统予以支撑,这就是带空行程的柔性支撑方案。α1和α2取值不同对降载效果有明显的影响,本文针对α1和α2的不同组合,构建了9种仿真工况。假设α1为正,α2为负,不妨以α1_α2的值命名每种工况,则9种工况分别为+5_0、+5_-5、+5_-10、+10_0、+10_-5、+10_-10、+15_0、+15_-5和+15_-10。
图1 带空行程的柔性支撑方案示意图Fig.1 Schematic of flexible-support technique with blank travel
2 仿真模型的建立
2.1 模型简化和网格处理
仿真拟定采用三维对称模型予以简化,简化假设与文献[5-9]一致,不同之处是考虑了水汽汽化和凝结的影响,同时计算的起始时刻导弹位于发射筒筒底,模型中计入了均压气体的影响,另外为保证收敛性,模型中引入了水的微可压缩性。
在对模型进行网格划分时,采用多区块的网格划分原则:发射筒内采用结构化网格,在发射筒外筒盖局部区域截取一个充分包容筒盖以及筒盖运动的区域,对该区域使用四面体网格,以方便采用动网格技术模拟筒盖的运动,且靠近筒盖的区域网格较密,远离筒盖的区域逐渐变稀;筒外的其他区域同样使用结构化网格,且靠近筒口区域的网格较密,远离筒口的网格稍疏,并将相临网格的尺度比设置为较接近1的值,这样即保证计算的收敛性,同时也可减小计算规模[9]。另外,考虑到动网格生长域与两相边界交叉或重合时会严重影响 VOF模型的收敛性,为确保计算的可靠收敛,模型中采用了域动分层动网格技术将导弹运动所导致的动网格生长和溃灭位置选择在了湍动较小的筒底和水面[10],而筒盖区域的动网格则按网格重构来实现,在网格重构动网格参数设置时启用了尺度函数、改进扭曲和面重构选项,其中将最大单元扭曲设置为0.8,最大面扭曲设置为 0.5,尺度重构间隔设置为1,尺度函数分辨设置为1,尺度函数变量设置为0.5,尺度函数比设置为0.7。实践证明,在采用相关方法和参数进行动网格设置之后,只要辅助设置一些表面网格重构,并且计算步长、松弛因子选取合适,就能得到合理的收敛结果。计算区域示意和计算网格见图2。
图2 计算区域示意和计算网格模型Fig.2 Computational zone and computation grid model
2.2 计算方法和计算工况
采用三维非定常、RANS方程求解,多相流为考虑水汽相变的VOF模型,紊流计算使用RNGk-ε二方程模型。由于仿真问题涉及筒口大气泡的脉动特性,采用VOF模型能清晰地捕获气液交界面变化特性,而且相较于Mixture模型和Eulerian模型,VOF描述方程少,计算规模也较小。为同时表述模拟弹平动和筒盖转动所导致的网格变化,模型中使用了4种动网格更新方法:弹簧光滑近似法、动态分层法、域动分层法和网格重构法。模拟弹运动根据测试数据用Profile文件编制时间历程来予以控制,为较好地描述模拟弹运动,模型中同时采用了对接网格和域动分层法动网格更新技术:对接网格的使用就是把计算区域分割成动网格区域和不动网格区域,并将动网格区域与不动网格区域的连通环节设置成对接边界;定义动网格区域的目的就是将动网格区域设置为随同模拟弹一起运动,保证将域动分层法动网格更新所产生的网格生长和溃灭边界移至发射筒筒底和水面,这有利于数值稳定性和收敛性。描述筒盖的转动时,模型中同时使用了对接网格和网格重分技术:对接网格的使用能有效地将筒盖局部区域中适合于描述结构复杂运动和实施网格重构算法的非结构化网格与其他区域的结构化网格实施对接,保证模型只有包容筒盖运动区域的网格才是四面体网格,这能有效减少网格数,从而减小计算规模;筒盖的运动是绕轴承基座铰链轴的旋转运动,在柔性支撑系统中,若将筒盖简化为刚体,则筒盖及其支撑系统就可简化为一个受激励作用的扭簧振子,设I为筒盖绕轴承基座铰链轴的转动惯量,Mc为流场作用于筒盖上的力矩(绕轴承基座铰链轴),K为柔性支撑环节的支撑刚度,α为盖体摆动的角度,则盖体运动的控制方程为

筒盖局部区域动网格的网格重构就是根据上述方程编写相应程序,并设置适当的网格重构准则参数来予以控制的。
为反应空行程量对筒盖受载特性的影响,计算选取了9种工况,每种工况的模拟弹出筒速度均为23 m/s,且模拟弹出筒时刻弹射工质气体的初始压强、温度和水汽比例由内弹道仿真预示程序提供[11],初始压强为 0.291 MPa,初始温度为405.9 K,弹性橡胶的支撑特性折算为扭转刚度后为10 886.0 N·m/rad,为保证剪切销有效解锁,按文献[6]中筒盖刚性支撑时筒盖受载力矩的2/3设置解锁载荷,即当筒盖受载力矩达到1 218.33 N·m时剪切销断裂,筒盖解锁。
3 结果分析
3.1 云图分析
考虑到9种计算工况在相应时刻点的压强、速度和两相分布云图基本相似,不同之处只是在具体量值方面略有差异,因此这里仅就工况1进行说明。
在导弹的弹射发射过程中,筒盖系统要承受3个明显的正、负压峰的影响,第1个正负压峰主要由均压气体的挤排出筒造成,其作用峰值小,在此不予列出;图3是第2个正压峰时刻、气泡过度膨胀筒口出现低压峰时刻以及第3个负压峰时刻发射筒筒口对称面上的两相分布云图。从中可看出,在模拟弹飞离发射筒筒口的过程中,发射筒内的高温高压气体将尾随导弹从筒口喷出,并在筒口形成一个高压气泡,这时气泡内的压强显著高于周围环境压强,然后气泡随着模拟弹的飞离继续膨胀,直到达到气泡过度膨胀状态(此时气泡达到体积最大状态,而且大部分筒盖均被气泡包裹),紧接着气泡开始收缩并出现气泡分裂现象,其中部分气泡尾随模拟弹飞离,而筒口气泡在收缩过程中由于海水回灌受筒盖影响而出现了明显的不对称现象,气泡主要集中在有盖一侧,而无盖一侧受海水挤压作用十分明显,且有部分气泡分裂开来,此时筒口气泡又处于压缩状态,过压缩之后又会重新膨胀。
3.2 筒盖受载分析
由于仿真工况较多,进行图示处理比较纷乱,这里仅就α2=0而α1不同时筒盖受载和筒盖摆动角度时间历程进行图示对比,如图4所示。
图3 筒口对称面上的两相分布特性对比Fig.3 Phase distribution of symmetric surface
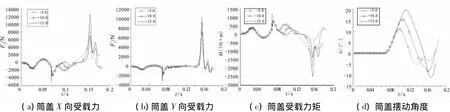
图4 筒盖受载和筒盖摆动角度时间历程对比(α2=0)Fig.4 Load-time curve over cover and angle-time curve(α2=0)
从图4可看出,不同工况在剪切销剪断前筒盖受载时间历程是相同的,而筒盖受载力矩达到第2个正峰值之后,剪切销断裂,筒盖变为自由铰支,受载力矩逐渐变小,当空行程α1结束后,筒盖系统变为弹性支撑,这时,筒盖受载力矩会再次回升,只是这时受载力矩回升的峰值不大,并且很明显,α1越大,筒盖受载力矩的第3个正峰值就越小,而受载力矩的第2个负峰值与α1成负相关关系;考察其他仿真工况发现,筒盖受载力矩的正峰值都能得到很好的降低,而筒盖受载的负峰值则没有明显的规律可循,这与实验结果相一致。
表1列出了不同工况筒盖受载力矩第3个负峰值的相关数据情况(其中,t为筒盖受载力矩达到第3个负峰值的时刻;Δαmax是筒盖受载达到第3个峰值时刻弹性支撑环节的压缩量;Mmax是筒盖受载力矩的第3个负峰值),从中可看出筒盖受载力矩达到第3个负峰值的时刻点基本一致;分析表中数据可见,筒盖受载力矩的第3个负峰值是由弹性支撑的压缩量Δαmax与筒盖空行程幅度 β=α1+α2的比值决定,基本上Δαmax/β的值越小,筒盖受载力矩的第3个负峰值就越小。
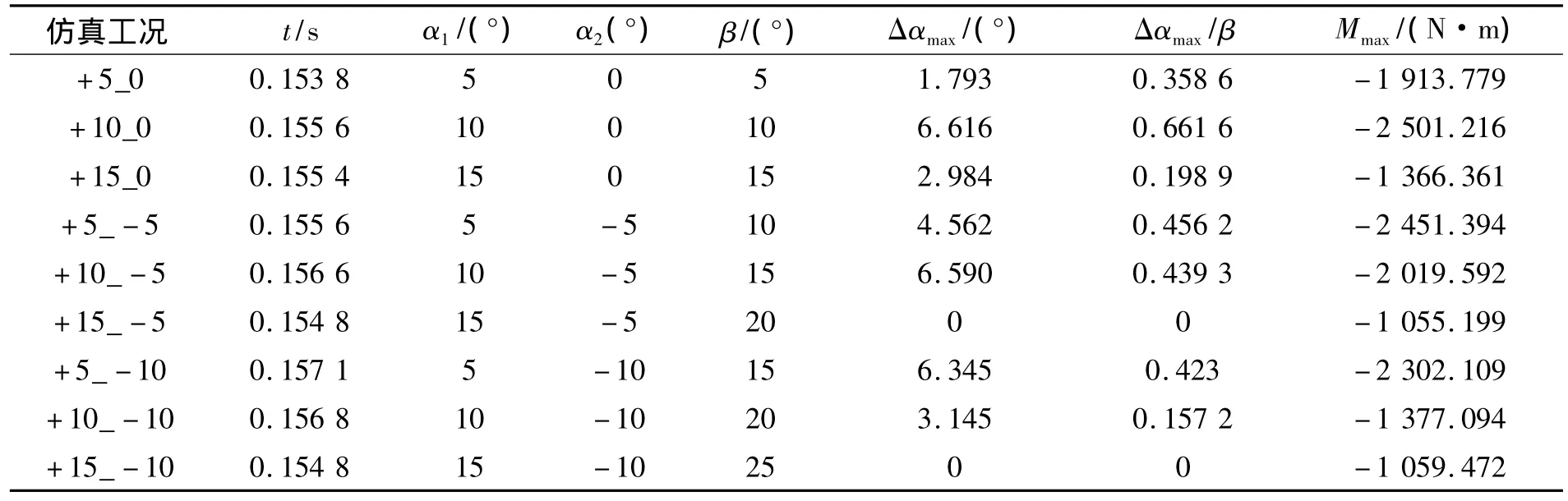
表1 筒盖受载力矩第2个负峰值对比Table 1 Comparison of the second negative load peak over cover
3.3 筒盖系统支撑环节受载
为获取筒盖支撑环节的支撑反力,本文对筒盖取分离体,进行了受力分析,其受载特性见图5,根据达朗贝尔原理可获取筒盖支撑环节的支撑反力特性,其中在X轴方向:

纵向Y轴方向:

式中m为筒盖质量;r为筒盖质心到铰链中心的距离;Fsx、Fsy为支撑环节所承受的支反力。
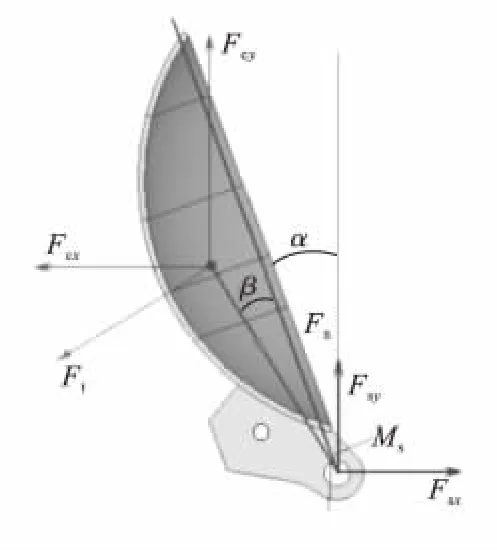
图5 筒盖的受载分析Fig.5 Schematics of load analysis over cover

而支撑环节的支反力矩为
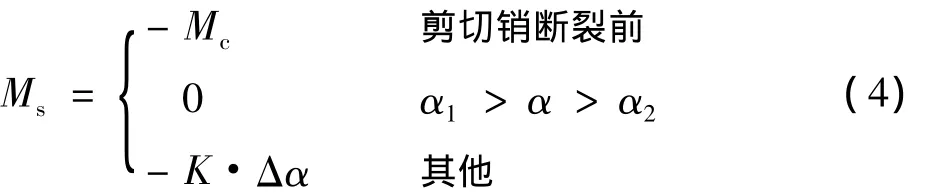
式中 Δα为弹性支撑的压缩量。
表2列出了不同工况下筒盖系统弹性支撑环节最大弹性压缩量和支撑环节受载力矩峰值。
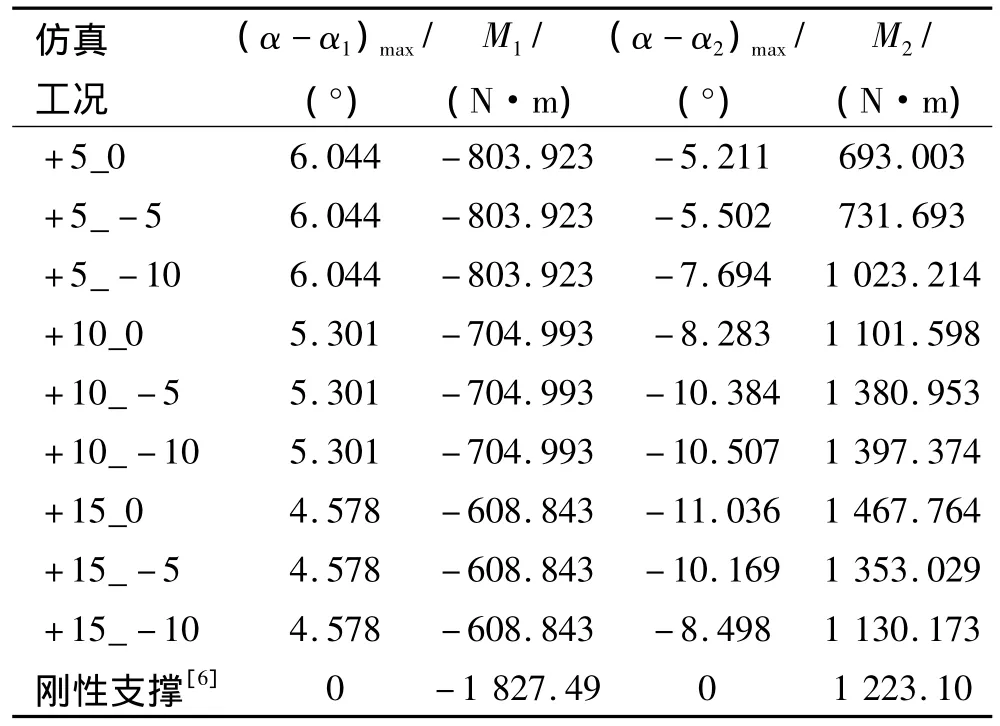
表2 筒盖系统弹性环节最大弹性压缩量和支撑受载力矩峰值对比Table 2 Maximum compression of flexible part and maximum load over cover
表2中,(α-α1)max为筒盖弹性支撑环节正向最大的弹性压缩量;M1为支撑环节受载力矩的第2个负峰值;(α-α2)max为筒盖弹性支撑环节负向最大的弹性压缩量;M2为支撑环节受载力矩的第3个正峰值。很明显支撑环节受载力矩的第2个负峰值与筒盖处于自由铰支环节正向自由摆动的幅度α1是负相关关系,α1相同时不同工况下支撑环节受载力矩的第2个负峰值相等。而对于支撑环节受载力矩的第3个正峰值,在+5_0时最小,而综合对比刚性支撑、柔性支撑以及带空行程的柔性支撑不难发现,筒盖系统支撑环节的受载特性是空行程+5_0的柔性支撑最好,相对于刚性支撑而言,其第2负向载荷降低56%,第3正向载荷降低43%,起到了比较良好的降载效果,而且留有的空行程量不大,也便于工程实现。
4 结论
提出了带空行程的柔性支撑方案;基于带相变的VOF模型和动网格技术并采用三维对称模型对潜射模拟弹筒盖系统带空行程的柔性支撑方案进行了仿真分析,获得了筒盖以及筒盖支撑环节的受载特性以及筒盖的运动特性,对比分析表明,带空行程的柔性支撑方案+5_0能很大程度地降低筒盖支撑环节的受载状态,而且空行程的幅度也不大,这对于工程设计和实现具有重要的指导意义。
[1]Hillebrecht Henry A.Submarine missile eject system[P].U S 4643072,1987.
[2]曾强.潜载导弹发射装置筒盖系统CAE研究[D].北京:北京理工大学机电工程学院,1997.
[3]王汉平,余文辉,赵恒,等.导弹筒盖系统的故障复现及结构改进[J].北京理工大学学报,2006,26(2):107-111.
[4]王汉平,余文辉,赵恒.潜射导弹筒盖系统弹性缓冲支撑方案研究[J].导弹与航天运载技术,2005,276(3):23-29.
[5]王汉平,段磊,程栋,等.潜射模拟弹筒盖系统柔性支撑受载特性仿真[J].宇航学报,2009,30(5):1816-1822.
[6]王汉平,余文辉,魏建峰.潜射模拟弹筒口压力场研究[J].兵工学报,2009,30(8):1009-1013.
[7]段磊.筒口压力场及筒盖系统降载技术的三维仿真研究[D].北京:北京理工大学,2009.
[8]吴友生.筒口压力场及筒盖系统降载技术研究[D].北京:北京理工大学,2008.
[9]韩占忠,王敬,兰小平.FLUENT流体工程仿真计算实例与应用[M].北京:北京理工大学出版社,2004.
[10]郝继光,姜毅,韩书永,等.一种新的动网格更新技术及其应用[J].弹道学报,2007,19(2):88-92.
[11]赵险峰,王俊杰.潜地弹道导弹发射系统内弹道学[M].哈尔滨:哈尔滨工程大学出版社,2001.
Flexible support technique for depressing load over cover system of underwater-launched emulating missile
WANG Han-ping,YANG Ming,DUAN Lei
(School of Aerospace Engineering,Beijing Institute of Technology,Beijing 100081,China)
A flexible-support technique with blank travel for depressing load over cover system was brought forward.The fluid field near canister outlet for underwater-aunched emulating missile and its effect on cover system were modeled and simulated using a 3D symmetric model based on dynamic meshing technique and VOF model with phase transformation.The characteristics of bubble pulsation near canister outlet,time-variable load over the cover and its supporting component and dynamics characteristics of cover were achieved through simulation of 9 cases.The results show that flexible-support technique with blank travel for depressing load over cover was feasible.It provided a new kind of reference standard for load-depressing cover system design.
underwater launcher;underwater-launched missile;pressure field near canister outlet;VOF model;multiphase fluid;dynamic meshing;flexible-supported
V553.1+3
A
1006-2793(2012)03-0306-05
2011-09-16;
2011-11-01。
王汉平 (1971—),男,副教授,研究方向为兵器发射理论与技术。E-mail:whp161@bit.edu.cn
(编辑:吕耀辉)
猜你喜欢
少先队活动(2022年9期)2022-11-23 06:55:52
机械工业标准化与质量(2022年9期)2022-09-30 07:22:08
石油沥青(2021年5期)2021-12-02 03:21:18
文化创新比较研究(2020年7期)2021-01-13 09:10:48
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
通信电源技术(2016年6期)2016-04-20 06:21:16
通信电源技术(2016年5期)2016-03-22 01:09:44
探测与控制学报(2015年4期)2015-12-15 15:00:56