新型有轨电车信号系统方案研究
2012-07-05 02:58:16刘新平
城市轨道交通研究 2012年5期
刘新平
(中铁第四勘察设计院集团有限公司,430063,武汉∥高级工程师)
19世纪末期,有轨电车技术日趋成熟,美国、英国、法国、日本等国家的很多城市相继建成了有轨电车。随着第二次世界大战的爆发,各参战国的有轨电车系统均受到严重的破坏。与此同时,汽车工业迅猛发展,有轨电车的发展则日渐衰退,世界各大城市的有轨电车纷纷停运或被拆除。如今城市化进程的加快和家用汽车的普及,使得城市交通不堪重负;虽然交通工具更加丰富,但人们的出行却更加不便,行车缓慢、交通堵塞随处可见,日趋严重的全球能源危机和大气污染问题也随之而来。虽然很多大型城市建设了城市轨道交通,希望借此来缓解交通压力,并减少城市中汽车尾气的排放量,但由于地下铁道和高架轻轨的巨额投资,反而使许多城市陷入深深的债务危机。因此,高效、廉价、无污染的有轨电车再一次走上了历史舞台,人们开始重新评价有轨电车在城市交通中的作用[1]。
信号系统是轨道交通的安全保障,它关系着每位乘客的生命安全;同时信号系统也是运营效率的保障,使得列车在安全运行的前提下实现线路的最大运能[2]。随着有轨电车的回归,一套与之相适应的信号系统也呼之欲出。从工程实用的角度来看,如何有效地配置信号系统以满足新型有轨电车运营的需求,成为了一个亟待探讨的问题。
1 新型有轨电车特点
现代新型有轨电车一般具有以下特性:①有轨电车的车辆定距较小,普遍采用关节铰接装置,线路的曲线半径最小可以在20m以下;②有轨电车线路的站间距小,平均站间距小于1km;③有轨电车的机械、电气设备小型化和轻量化;④有轨电车最大运行速度可在70~80km/h,车辆自重轻,单位车体长度的自重在1.5t/m左右,车辆牵引加速度在1.0~1.3m/s2,车辆常用制动减速度为1.0~1.5 m/s2,紧急制动减速度在2.5~3.5m/s2。
有轨电车的车辆运行在钢轨上,其路权直接影响有轨电车运行的效率和安全,并决定着有轨电车的运行模式、控制模式。根据美国运输研究学会的建议,可将轨道交通系统的路权划分3种形式9种类别[6](见表1)。
轻轨、地铁系统广泛采用A类路权,高峰时期运营间隔小于2min。对于有轨电车,其路权形式就比较多样。为节省投资和运营成本,大多数有轨电车采用B或者C类路权;部分项目为了更大地发挥有轨电车的运输效率和提高其运营安全性,也会采用A类路权。
现阶段,我国大连、上海和香港等地运营的有轨电车都属于C类路权,平交道口多,与机动车混行。在平交道口处采用自动控制的信号灯,道岔的扳动由司机无线遥控[3]。在这种运营模式下,不仅有轨电车运行速度受到限制,而且要完全依靠司机人工目视和较好的车辆制动能力来保障其基本的运营安全和顺畅。平交道口多,会影响其他公共交通方式,易造成交通堵塞;依靠司机人工目视,易增加司机的疲劳度,特别是在夜间或者恶劣天气下驾驶时,存在更大的安全隐患。
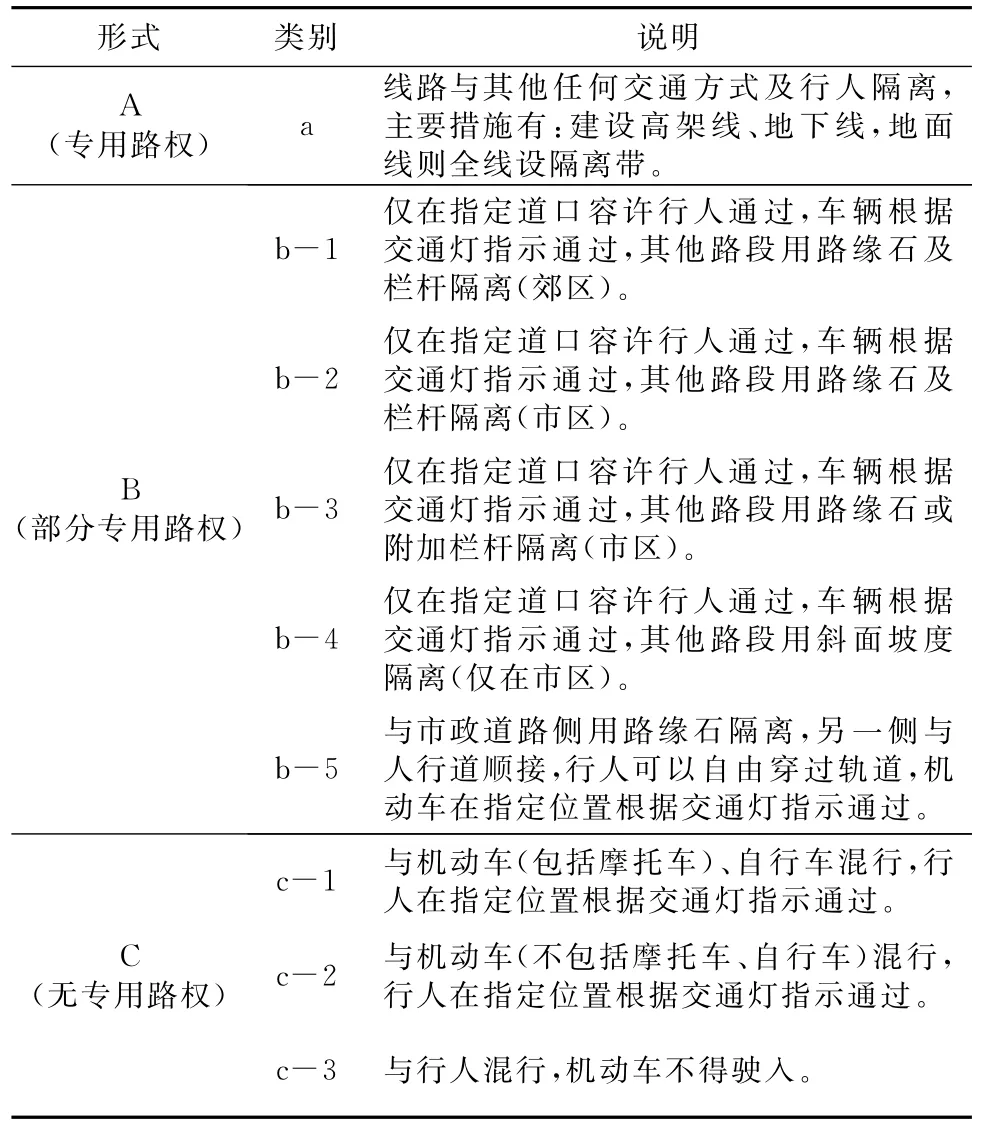
表1 轨道交通系统路权分类表
新近获批的佛山市南海区新型有轨电车项目采用的路权就是封闭路权的,这样既保障了运营的安全,同时也大大提高了运输效率。
2 新型有轨电车行车安全控制方案
对于采用B类或C类路权的有轨电车,由于依靠司机人工目视驾驶,只需按照基本的交通规则运营即可,无需增设特殊的信号控制设备。而对于采用封闭路权的A类有轨电车,信号系统控制方案则需进行必要的分析和研究。
2.1 目视行车
如果采用封闭路权,有轨电车司机可以依靠目视行车,司机无需担心其他社会车辆的突然介入。从安全的角度出发,该模式下的有轨电车要满足以下要求:①有轨电车司机应具有丰富的驾驶经验,对前方目标的距离及速度判断准确;②有轨电车的最高速度必须限制在50km/h以下,以确保有轨电车能及时停车;③有轨电车的制动率要大,制动距离要求尽可能短(一般不大于25m)。
该模式下的有轨电车,其运行效率及安全完全由人工保证,安全性差,运行效率低,但在信号系统方面基本不需要投资。
2.2 闭塞行车
按照闭塞分区的分割方法,闭塞行车可以分为:站间闭塞、自动闭塞、移动闭塞等。如果采用闭塞行车,司机只需依据信号机的显示或车载信号信息行车。该模式下的有轨电车要满足以下要求:①有轨电车应有专属路权,不能有其它交通方式的干扰;②轨旁必须有闭塞分割设备(轨道电路或者计轴设备等);③必须有用于指导有轨电车前行或者停止的信号显示设备(信号灯或者车载信号显示设备)。
在该模式下,有轨电车间的安全间隔由信号系统通过信号显示或者移动授权来进行控制,以地面信号显示或者车载设备信号显示作为行车凭证,可以有效避免人为操作失误导致的事故。该模式对有轨电车的制动率及制动距离等要求不高,有轨电车可以以较高的速度运行,运行效率高,但需要增加适当的建设信号系统的投资。
2.3 行车安全控制方案比较
在封闭路权的有轨电车系统中,当有轨电车在平坡道上处于最不利的运行情况下(司机反映时间3s,电车制动装置响应时间2s)时,假设此时有轨电车的运行速度为70km/h,紧急减速度为2.5m/s2,那么从有轨电车制动装置开始响应到停车,所需时间为7.8s,列车完全停稳的紧急制动距离为164m。如果采用目视行车方式控制行车安全间隔,为保证司机能及时发现前面的障碍物,司机的最低安全视距应在200~300m左右,在遇有下坡道、弯道、夜间、隧道内或者暴雨、大雾极端天气等情况时,司机的最低安全视距离则需要大于400m。这显然是做不到的。
鉴于上述分析,在保障运营效率的前提下,新型有轨电车的行车安全间隔控制方案应采用闭塞行车,这样才能保证高密度行车下的运营安全。
3 新型有轨电车行车间隔控制方案
新型有轨电车的站间距小,在高峰期时列车密度较大,因此,必须采用适当的行车间隔控制方案来提高行车效率。而行车间隔与闭塞形式密切相关,闭塞形式决定了有轨电车的运行能力。
可以应用于新型有轨电车的闭塞方式有自动站间闭塞和自动闭塞两种方式。自动站间闭塞方式的闭塞分区以站间为单位进行划分,闭塞区段较少;自动闭塞是在站间闭塞无法满足运营需求的情况下,通过在区间上增设信号点,增加闭塞区段。
3.1 保护区段的计算
在不考虑线路坡道及弯道限速等条件下,假设最大站间距为1 000m,有轨电车的长度为80m,有轨电车的常用加速度a1为1.0m/s2,减速度a2为1.5m/s2,紧急制动减速度a3为2.5m/s2,停站时间为25s,司机反应速度为3s,信号设备反映时间为2s。在实际运行过程中,有轨电车的最高运营速度一般控制在最高速的90%左右,即63km/h,在进入站台端时限速运行为50km/h。
在正常运营过程中,列车的追踪规则如图1所示。

图1 正常运营过程中列车追踪规则示意图
有轨电车追踪运行时,前后两列列车的安全间隔最少保持1个保护区段的距离。如图1所示,只有当列车M 1出清1站台外方信号机的保护区段后,后面的列车M2才允许进入两站间运行,直至在前方站台停车。设置保护区段的目的是为了防止后续列车误闯红灯而预留的保护距离,以确保列车在最不利情况下仍然不至于发生追尾事故。
由于有轨电车在站台区域内行驶的最高速度v0为50km/h(因为有轨电车在进入站台端时已经进行了限速),则有轨电车紧急制动所需时间t1=v0/a3=5.56s,在t1时间内,有轨电车减速运行距离为s1=a3(t2)2/2=38.64m;在信号设备获知电车闯红灯到紧急制动生效之前,系统需要的反应时间t2=2s,在t2时间内,有轨电车以50km/h速度运行距离为s2=27.78m。因此,整个保护区段的总长度s=s1+s2=66.42m(取70m)。
3.2 最小行车间隔
图1中所示的列车M1正常加速出站,当列车尾部离开保护区段时,2站台的出站信号机变成绿灯,列车M2可以驶向1站台了。通过计算可知,当列车 M1加速到63km/h时,耗时t1=17.5s,行驶153m≈车长80m+保护区段70m。那么当经过t1秒之后,列车M2即可发车。列车M2的站间运行的速度曲线如图2所示。

图2 列车站间运行速度曲线图
如图2所示,列车M2在2站台启动,以a1加速度运行直至速度达到63km/h,此时加速耗时t2=17.5s,列车尾部走行的距离为L2=153.25m。
列车M2头部进入站台1的端部时,车速应从63km/h降低到50km/h,有轨电车的常用减速度为a2,减速持续时间为t4=2.4s,列车尾部走行距离为L4=46.32m。
列车M2在站台1内运行,以a2减速度均匀减速,从50km/h降为0,所需时间t6=9.26s,列车尾部运行距离为L6=63.4m<80m(车长),那么列车M2在车头进入站台后,以匀速方式运行了一段时间t5,匀速运行的距离大约为L5=20m,可计算得到t5=1.44s。
列车M2在出发加速到63km/h后匀速运行,其运行的距离应为:L3=1 000m-L2-L4-L5-L6=735m,匀速运行持续时间t3=42s。
M2在到达1站台后停车时间t7=25s后再次起动。
两列列车相互追踪的最短时间间隔为t1~t7之和,即为115s,小于2min。实际工程中有轨电车列车的站间距会更小,追踪时间则会更短。
通过以上计算可知,站间闭塞方式已可以满足有轨电车高密度的区间追踪需求。理论上,虽然自动闭塞可以进一步减少有轨电车站间追踪时间。但是追踪时间的减少,必然伴随的是列车数量的增加和信号设备投资的增长,如此一来,工程投资便会俱增。
在现实的运营管理过程中,列车的运营间隔还要考虑到站间距的长短、线路的坡道、弯道、限速等等因素,列车在区间运行的速度往往达不到最高运行速度,因此,按照站间闭塞方式运营时,列车的最小追踪时间可能会略大于2min。然而对于城市建设有轨电车的目的以及有轨电车的工程规模和运能而言,2 min的行车间隔已足以满足高峰时段的运输需求。
4 结语
随着城市化进程的加快,城市交通拥堵问题日渐凸显,地铁、轻轨虽然能缓解城市交通压力,但是建造成本高昂。新型有轨电车凭借其造价低、换乘方便等优势再次成为了轨道交通领域关注的热点。信号系统是轨道交通的重要组成部分,鉴于新型有轨电车具有平均站间距小、发车密度大,但工程投资较少等特点,从投资的性价比方面考虑,站间闭塞行车控制方案是最为合理的。通过文中计算分析可知,信号系统采用站间闭塞方式即可满足正常高峰时期的运营需求。
[1]唐淼,马韵.现代有轨电车在城市区域内的适应性[J].上海交通大学学报,2011,45(S1):71.
[2]唐贾言.现代有轨电车的运营控制系统[J].自动化应用,2010(12):61.
[3]王力.新型有轨电车的信号系统[J].铁道通信信号,2009,45(1):33.
[4]林瑜筠,李鹏,李岱峰,等.铁路信号新技术概论[M].北京:中国铁道出版社,2005.
[5]GB 50157—2003地铁设计规范[S].
[6]王建.试论有轨电车与轻轨系统的相互关系[J].中国城市交通,2004,2(3):24.
猜你喜欢
铁道通信信号(2020年1期)2020-09-21 08:55:18
铁道通信信号(2018年12期)2019-01-31 05:36:46
铁道通信信号(2018年7期)2018-08-29 01:17:06
铁道通信信号(2018年3期)2018-04-19 02:32:44
中国公路(2017年19期)2018-01-23 03:06:29
中国自行车(2017年1期)2017-04-16 02:53:49
铁道通信信号(2016年11期)2016-06-01 12:11:22
铁道通信信号(2016年6期)2016-06-01 12:10:20
铁道通信信号(2016年3期)2016-06-01 12:10:18
中国铁道科学(2015年1期)2015-06-26 08:33:56