超视距空空导弹协同允许发射区解算方法
2012-07-04 11:28方洋旺乔治军李为圣肖冰松
电光与控制 2012年3期
张 平, 方洋旺, 乔治军, 李为圣, 肖冰松, 张 磊
(1.空军工程大学工程学院,西安 710038;2.中国人民解放军95856部队,南京 210000;3.中国人民解放军61541部队,北京 100094)
0 引言
随着信息化技术的迅猛发展,战场信息共享水平不断提高,使得空中多平台协作式武器发射与制导成为可能[1]。而武器发射受到其允许发射区的制约。目前,舰空导弹在协同条件下的相关问题已经有研究成果[2-3],而对空空导弹在协同制导条件下发射区的研究还未见报导,因此,本文研究协同制导条件下导弹允许发射区问题。首先,分析了编队协同探测覆盖的区域;接着,对导弹协同发射问题进行了定量决策;然后,根据导弹和目标运动模型和约束条件,提出了基于编队内切圆有界黄金分割搜索的方法,并对3种编队队形下的协同发射区远界进行搜索。
1 编队协同探测
在航空编队协同作战过程中,多机协同探测能充分利用分散在不同区域的探测器的多种优势[4],通过信息处理和融合可以延长对目标的探测时间和扩展空间探测覆盖范围,提高目标分辨能力,增大导弹制导信息网范围,从而提高导弹的攻击范围和整体作战效能。
1.1 飞机的RCS值
飞机的雷达反射截面积在给定雷达下,RCS的大小与目标相对探测雷达的方位角和俯仰角有很大关系。
将飞机当作由s个重要的散射源(如平板、二面角、角盒、天线、边等)组成的一个集合。复合的回波就是单个波的矢量叠加,RCS与复合波电场强度的平方成正比[5]。因此,RCS(σ)计算方法为

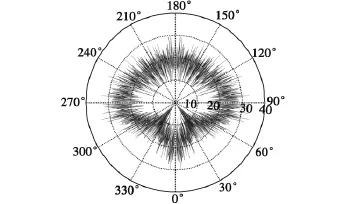
图1 s个散射源叠加得到RCSFig.1 RCS obtained by superposition of s dispersion sources
从图1中可以看出,各个方向飞机的RCS值是明显不同的。由对称性,以0°~180°照射角度为横坐标,RCS平均值为纵坐标,得到角度与RCS平均值的关系,如图2所示。
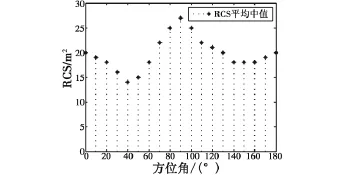
图2 照射角度与RCS平均值关系图Fig.2 RCS mean value and detecting angle
1.2 多机协同探测覆盖区域
当编队中任一平台发现目标时,通过数据链通信将目标信息发给友机,友机将以此目标坐标作为搜索图形的中心,展开目标探测、跟踪,如图3所示。
从图3中可以看出,不同平台对目标的探测效果是不同的。在协同制导过程中,选择制导能力最好的平台接替导弹中制导,其他战机则可以对其余的目标进行攻击。

图3 数据链引导下编队协同探测覆盖区域Fig.3 Cooperative formation detecting area under data link leading
2 导弹协同发射决策
编队协同的火控工作方式和单平台工作方式存在很大差异,编队协同为超视距空空导弹的发射条件、导弹制导过程提供更多有利因素。
在协同环境下,目标信息由分布式的编队成员和数据链提供,即使某个单机机载雷达损坏也能够通过数据链获取较精确的目标信息。由此可以看出,协同环境下导弹发射条件变得宽裕,提高导弹发射概率,更有利于“先敌发射”。
由于目标与编队中各个飞机平台相对位置不尽相同,因此选择发射导弹的飞机平台也将不同。通过单机发射区解算研究,可以得出导弹发射远界与目标的速率vt、载机的速率vf、载机的作战高度h和目标进入角ϑ有关,即导弹作战远界Rf可以表示为

具体计算方法可参照单机攻击目标时导弹攻击距离计算公式[6-7]。例如,载机和目标均在10 km 高度飞行,速度vt=vM=380 m/s,受机载雷达探测角度的限制,某型导弹作战远、近界是进入角ϑ的函数,如图4所示。
假设当前t时刻第i战机的速率为vf(i),飞行高度为hf(i),进入角为ϑ(i),与目标的距离为R(i)(i=1,2,…,N);目标的速率为 vt,飞行高度为 ht,通过火控解算得到第i个战机发射导弹最远距离为Rf(i),则令

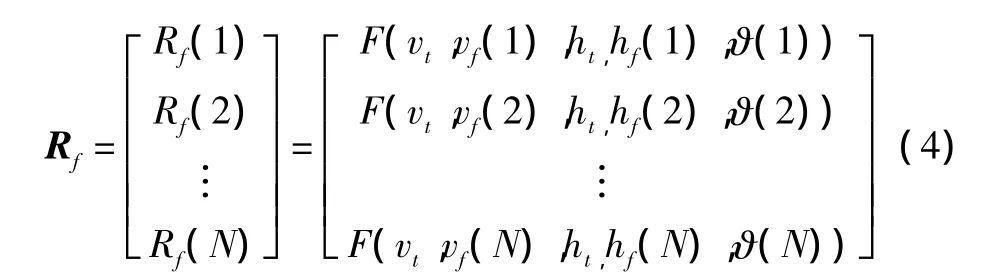

图4 14 km高度导弹攻击区包络Fig.4 Missile launch envelope at height of 14 km
3 协同制导方式及导弹发射区约束条件
3.1 协同制导方式
协同发射之后在充分利用友机节点的基础上,按照导弹中制导数据信息传输方式的不同,协同制导可分为如下两种。
1)本机发射、友机传递制导。
本机导弹发射后,由于受到导弹天线接收角度的限制,由友机负责将本机的中制导修正指令通过数据链转发给导弹,导弹的控制权仍然由本机掌握。
2)本机发射、友机制导。
本机发射后,在中制导过程中本机收到敌机威胁把导弹移交权给其他友机,并由其友机继续进行导弹中制导[8]。
3.2 协同发射区约束条件
影响协同发射区的因素很多,可分两类:一类导弹自身在攻击目标的过程中所受到的约束条件[7];另一类可以归结为编队平台在对导弹进行中制导过程中,受战场态势的影响在通信距离、角度等方面的约束条件[9-10]。
1)导弹约束条件。
导弹击中目标可定义为:r<e并且t>tv。其中:e为允许的脱靶量;tv为导弹引信解除保险时间。否则,导弹攻击失败。
攻击失败的原因主要有以下几种情况:
①高度限制,空空导弹的飞行高度一般不得高于25 km,同时不能小于200 m;
②导引头动态视场角限制,若动态视场角超过导弹速度前置角就会丢失目标;
③被动段最小飞行速度限制,当导弹飞行速度小于一定值时,不够提供导弹的升力,此时导弹失控;
④导弹可控飞行时间的限制,当飞行时间大于可控时间时,导弹失控;
⑤引信最小遇靶相对速度限制,当遇靶相对速度小于一定值时,引信无法正常工作;
⑥引信解锁时间限制,当弹目接近时,设剩余时间小于引信解锁时间时易脱靶;
⑦战斗部有效起爆区限制,此时的视线角不大于90°。
2)编队内平台间约束条件。
①提交、交接制导的两个平台之间的距离不能大于最大通信距离,否则数据不能有效传递;
②交接制导的平台与发射的导弹之间的距离不能大于数据传输的通信距离,否则无法进行指令修正;
③交接制导平台的位置应该落在导弹接收天线的角度范围之内;
④当导弹威胁到编队中其他平台时,即发射出的导弹穿越编队空间,与编队中任一平台的距离小于一定距离时(这里假定为500 m),需重新解算发射区。
4 编队协同下超视距导弹攻击过程
综上所述,通过分析编队作战的整个过程,协同环境下超视距空空导弹攻击过程如图5所示。
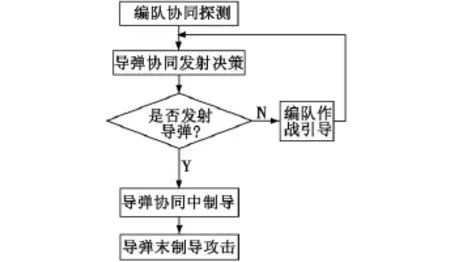
图5 攻击过程流程图Fig.5 Flow chart of attacking
5 有界黄金分割搜索方法
根据编队队形选取坐标原点建立编队极坐标系,采用一维搜索中的黄金分割法[11]对导弹攻击近距离边界和远距离边界分别进行搜索。首先,确定载机位置相对原点的方位,找到最大初始距离范围[a0,b0],计算黄金分割点Rg=a0+0.618×(b0-a0),然后以分割点位置为目标的初始位置进行仿真,根据脱靶量及弹道仿真约束条件判断导弹是否命中目标,如没命中,则对Rg进行修正,重新循环计算,直至求出满足约束条件的边界为止。整个发射区搜索流程如图6所示。

图6 协同制导下发射区远界搜索流程Fig.6 Flow chart of searching launch envelope with cooperative guidance
仿真开始阶段,首先确定协同编队方式,确定目标的RCS模型和目标的机动方式,计算编队的内切圆,建立以内切圆心为原点的极坐标系;然后,通过方位角(俯仰角)确定极坐标系内目标的方向,在此方向上采用一维黄金分割法对目标的距离进行搜索,距离找到之后改变目标方位角(俯仰角),直到整个圆周搜索完毕;最后,所记录的b值便是发射区的最远值。
6 仿真研究
对编队4机协同作战进行研究,载机A、B、C、D机载雷达对5 m2典型目标有效探测距离为120 km。空空导弹参数如下:引用某型导弹的气动参数,导引头截获距离为18 km,目标匀速直线飞行,4架载机和目标速度均为380 m/s,对如下3种编队队形进行仿真。
编队队形1 编队同高度前后平行飞行,具体位置参数如图7所示。
编队4架飞机与目标同在10 km高度飞行,飞机的航向角均为0°。协作条件下的导弹发射区如图8所示,其具体参数见表1。
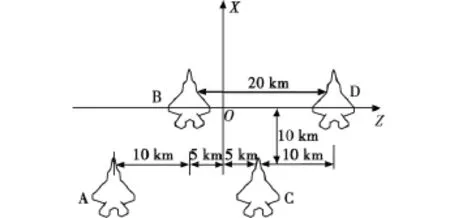
图7 编队队形1Fig.7 Formation 1
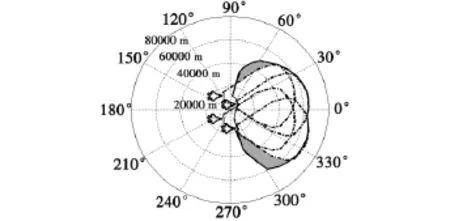
图8 编队同高度前后平行飞行允许发射区Fig.8 Allowable launch envelope for four fighter’s navigation angle of 0°at the same height
图8中虚线部分为单机作战的发射区,实线为协同发射区,图中阴影部分面积为发射区增加区域。如目标在上阴影部分,通过协同发射决策得到由A平台发射导弹,由于导弹在追击目标时弹道并不是平直的,在中制导过程中导弹姿态的变化使得A平台不在导弹接收天线的角度范围之内,而此时B平台在导弹接收天线的角度范围之内,能够接替中制导使得导弹命中目标,从而使得原本单机打不中目标的区域变为允许发射区。下阴影部分的产生与之类似。

表1 编队队形1的允许发射区参数Table 1 Some data of formation 1’s cooperative allowable launch envelope
编队队形2 4机处于不同高度前后平行飞行,编队飞机B、D与目标同在10 km高度飞行,飞机A、C在15 km高度飞行,如图9所示。计算得到10 km高度导弹协同允许发射区,如图10所示,其具体参数见表2。
从图10中可以看出,编队高度协同飞行,高空发射导弹打击低空目标时,导弹进入末制导阶段时具有较高的速度,从而有效缓解由于相对速度变小,引信无法正常工作的限制(第3.2节中导弹约束条件(5)),这样间接地扩大了发射区远界。
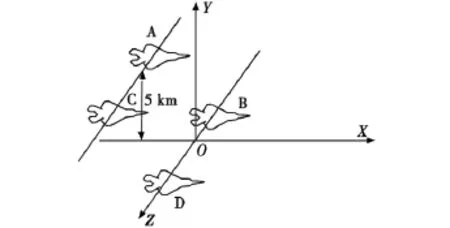
图9 编队队形2Fig.9 Formation 2
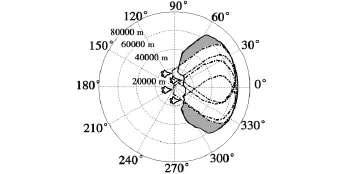
图10 编队高低协同前后平行飞行允许发射区Fig.10 Allowable launch envelope for four fighter’s navigation angle of 0°at different height

表2 编队队形2的允许发射区参数Table 2 Some data of formation 2’s cooperative allowable launch envelope
编队队形3 4机处于不同高度相向45°飞行,编队飞机A、B与目标同在10 km高度飞行,飞机C、D在15 km高度飞行,侧向相距原点30 km,如图11所示。所得协战条件下的导弹允许发射区如图12所示,其具体参数见表3。
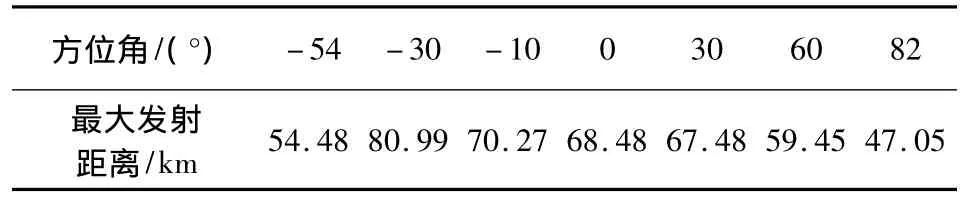
表3 编队队形3的允许发射区参数Table 3 Some data of formation 3’s cooperative allowable launch envelope
当编队采用高度协同和角度互补协同时,使得编队整体允许发射区面积比非协同制导情况下增加了大约1/3,利用高空发射导弹,使发射远界提升。
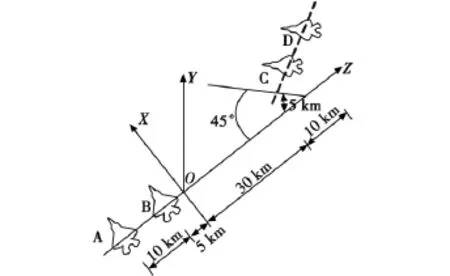
图11 编队队形3Fig.11 Formation 3
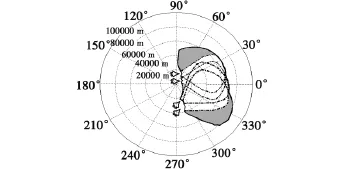
图12 编队高度相向45°飞行允许发射区Fig.12 Allowable launch envelope for two fighter’s navigation angle of 45°
7 结论
针对超视距空空导弹复合制导的特点,通过建立探测、协同发射、协同制导模型,构建一系列约束条件,对3种编队队形下的协同发射区进行仿真,研究得出以下结论:
1)编队协同制导能够使导弹允许发射区增加,不同的编队队形具有不同的协同发射区;
2)高度协同和角度协同使得导弹允许发射区增加最明显,高空发射打击低空目标情况下,使导弹允许发射远界提升。
编队协同允许发射区随编队中任何平台参数的变化而变化,与高度、速度、角度及目标的运动方式等众多因素有关。本文提出一种协同允许发射区解算的方法,针对某些编队形式对其发射区进行了解算,而面对瞬息万变的战场态势需要进一步去研究实时动态的允许发射区解算方法。
[1]童明成,张凤霞,贺建良.网络环境下空中多平台联合攻击作战方式[J].电光与控制,2009,16(5):19-22.
[2]聂心东,姜文志,刘兵.空舰协同制导下舰空导弹杀伤区低界研究[J].电光与控制,2009,16(6):24-27.
[3]聂心东,帅鹏,姜文志.舰舰协同制导下舰空导弹水平杀伤区研究[J].指挥控制与仿真,2009,31(3):29-31.
[4]肖冰松,方洋旺,许蕴山,等.双机协作发射与制导中程空空导弹技术研究[J].电光与控制,2011,18(2):13-27.
[5]张考,马东立.军用飞机生存力与隐身设计[M].北京:国防工业出版社,2002:171-250.
[6]杜昌平,周德云,江爱伟.一种空空导弹可攻击区快速算法[J].西北工业大学学报,2006,24(6):682-685.
[7]FLEEMAN E L.Tactical missile design[M].AIAA Education Series,American Institute of Aeronautics and Astronautics,Inc,2001.
[8]肖冰松,方洋旺,胡诗国,等.多机空战协同决策方法[J].系统工程与电子技术,2009,31(3):610-612.
[9]刘志华,季海波.数据链技术在战术武器中的应用方案研究[J].航天控制,2009,27(3):61-64.
[10]ACEVEDO R A.Valued Information at the Right Time(VIRT)and the navy’s Cooperative Engagement Capability(CEC)—A Win/Win proposition[D].Monterey:Naval Postgraduate School,2006.
[11]陈宝林.最优化理论与算法[M].北京:清华大学出版社,2007.
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
科学导报·学术(2020年26期)2020-10-21
作文大王·低年级(2019年6期)2019-08-01
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
西北工业大学学报(2015年1期)2016-01-19
太空探索(2014年1期)2014-07-10
自然资源遥感(2014年2期)2014-02-27
航空知识(2001年10期)2001-10-28