
基于SCA60C的帆板角度自动调整系统的研究
2012-07-04 09:26:02刘燎原
制造业自动化 2012年10期
刘燎原
LIU Liao-yuan
(江苏建筑职业技术学院 信息电子工程学院,徐州 221116)
0 引言
角度自动调整,是指物体可以自动调整到系统所需要的角度以实现物体精确定位,这在航空航天、航海、汽车驾驶、数控加工等现实生活领域中有着广泛应用。这涉及到单片机和传感器技术的综合应用,单片机是系统的控制核心,传感器为系统提供进行处理和决策所必需的原始信息,我们把单片机和倾角传感器结合起来,就可以实现一般领域的角度自动调整控制。本文以航海领域的帆板的角度控制为研究对象,设计了一种模拟的帆板控制系统。
1 总体设计
该系统要求设计一个模拟的帆板控制系统,如图1所示。用风扇模拟风,通过对风扇转速的控制来实现调节风力大小,从而来改变帆板转角θ。本系统要求风扇和帆板的距离d为10cm时,可以通过操作键盘控制风扇转速,使帆板转角θ能够在0~60°范围内变化,并且能够实时显示帆板的转角θ;还可以通过操作键盘,让帆板在很短时间内稳定在某个角度。

图1 帆板控制系统
根据设计的基本要求,设计任务主要完成的是帆板转动到不同的角度,能实时显示出角度的大小,并能够通过键盘来控制风力的大小,以实现帆板的角度在要求的范围内变化,最后能稳定在某个角度。为实现相应的功能,本系统可以分为以下几个部分:单片机主控模块、电扇模块、角度传感器检测模块、A/D转换模块、显示模块、键盘输入模块、声光报警模块,如图2所示。
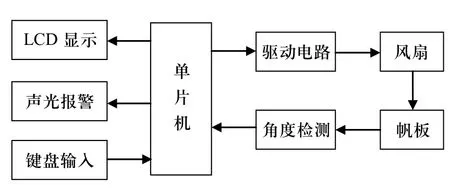
图2 系统框图
2 硬件设计
本系统采用STC89C52RC单片机作为主控芯片,通过L298驱动模块驱动电扇转动,使用倾角传感器SCA60C检测帆板转动的角度,再由AD0832转换送入单片机,通过数学公式转换为角度值,选用LCD1602液晶屏实时显示角度。本系统通过改变PWM波的占空比实现调整风力大小,采用4×4矩阵键盘实现键盘控制,可以实现帆板角度的增加、减小、角度预置等操作。
2.1 倾角传感器
倾角传感器是用来检测帆板的倾角,它的基本型号为模拟输出和数字输出。数字输出的传感器能输出数字信号,但成本较高,且非常敏感,电路的波动或是器件的振动对输出值的精度都有非常大的影响,温度对它也有一定的影响。采用模拟输出的传感器,成本低,长期稳定性好,适合在各种环境较差的场合角度。模拟输出的信号可以经过A/D转换,转换成适合单片机的数字信号。所以我们采用了模拟倾角传感器SCA60C。
SCA60C是芬兰原装的高精度单轴倾角传感器[1]P54,可用在一些控制类的角度精确度比较高的情况,比如平衡小车、单摆系统等。它测量范围1g(±90度),单极5V供电,比例电压输出,0.5V-4.5V模拟电压输出。它的优势是抗冲击能力强,能耗低。SCA60C实际上是一个加速度计,内部由一个硅微传感器和信号处理芯片组成;SMD形式封装,通过测量地球引力在测量方向上的分量,再将其转换为倾斜角度。所测物体的角度和输出电压的关系曲线如下图3所示,公式近似为:α=arcsin(0.5Vout-1.25),α为所测物体的角度,Vout为倾角传感器的输出电压。
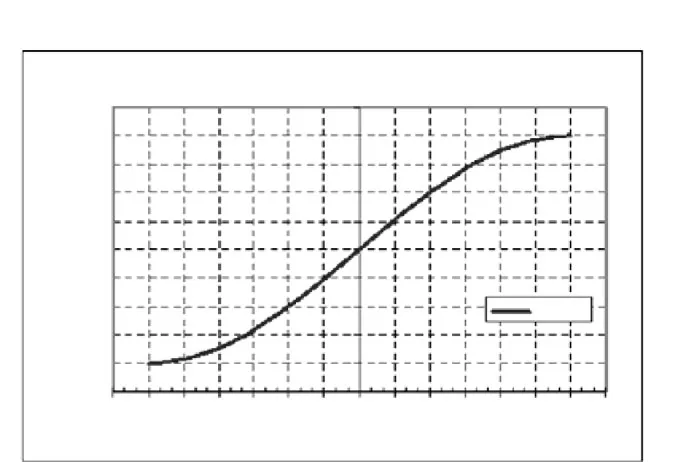
图3 转角方向
在实际使用中,我们把SCA60C固定在帆板的轴上,只用到了SCA60C芯片的3个管脚,如图4所示。其中4脚接地,8脚接5V电源,7脚为输出端口,能输出模拟的电压信号,在地与电源之间要接一个47nF的滤波电容,保证电源的稳定性。通过测量输出电压信号的大小,根据公式估算出倾角的大小。
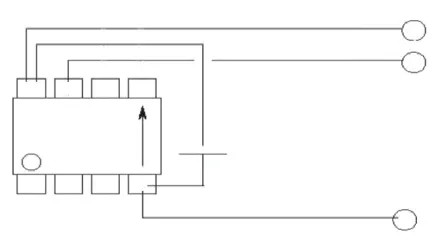
图4 角度传感器的使用管脚图
2.2 PWM调速模块
PWM调速[2]P168是指利用大功率晶体管的开关特性来调制固定电压,按一个固定的频率导通和断开,根据需要改变一个周期内“导通”和“断开”时间的长短,即改变直流伺服电动机电枢上电压的“占空比“。我们引进电压平均值Uav,它可用下式表示:Uav=ton*Us/T=aUs.式中ton为开关每次接通的时间,T为开关通断的时间周期,a为占空比,a=ton/T。由上式可见,改变脉冲的占空比,电动机两端的电压平均值也随之改变,因而也就控制了电动机转速。改变占空比有两种调制方法,一种是脉冲宽度调制,缩写为PWM;另一种方式是脉冲频率调制,缩写为PFM。目前,直流电动机的控制中,以应用PWM控制方式为主, 它是指开关周期恒定,通过改变导通脉冲宽度来改变占空比的。本设计中是利用软件来产生PWM波,在周期恒定的情况下,通过改变高电平的时间来改变占空比的。
PWM波要经过放大后输送给风扇,我们采用计算机的散热风扇来模拟风力,采用L298为驱动芯片[3]P87。L298是双H桥高电压大电流功率集成电路,可用来驱动继电器、线圈、直流电动机、步进电动机等电感性负载。它的驱动电压可达46V,直流电流总和可达4A,其内部具有2个完全相同的PWM功率放大回路。图5为L298驱动电路,1脚接地,2脚、3脚接直流电机的正负极,4脚接+12V,6脚为使能端接单片机P3.7,该端口是单片机软件产生的PWM波输出端口,让电机实现调速。8脚接地,电路中的5脚、7脚是控制电机正反转的,只需接电源和地就可以实现电机正反转。

图5 L298驱动电路
3 软件设计
本系统的软件程序采用C语言编写,包括LCD显示程序、A/D转换读取程序、PWM波产生程序和键盘扫描程序等。主程序的流程见图6所示。
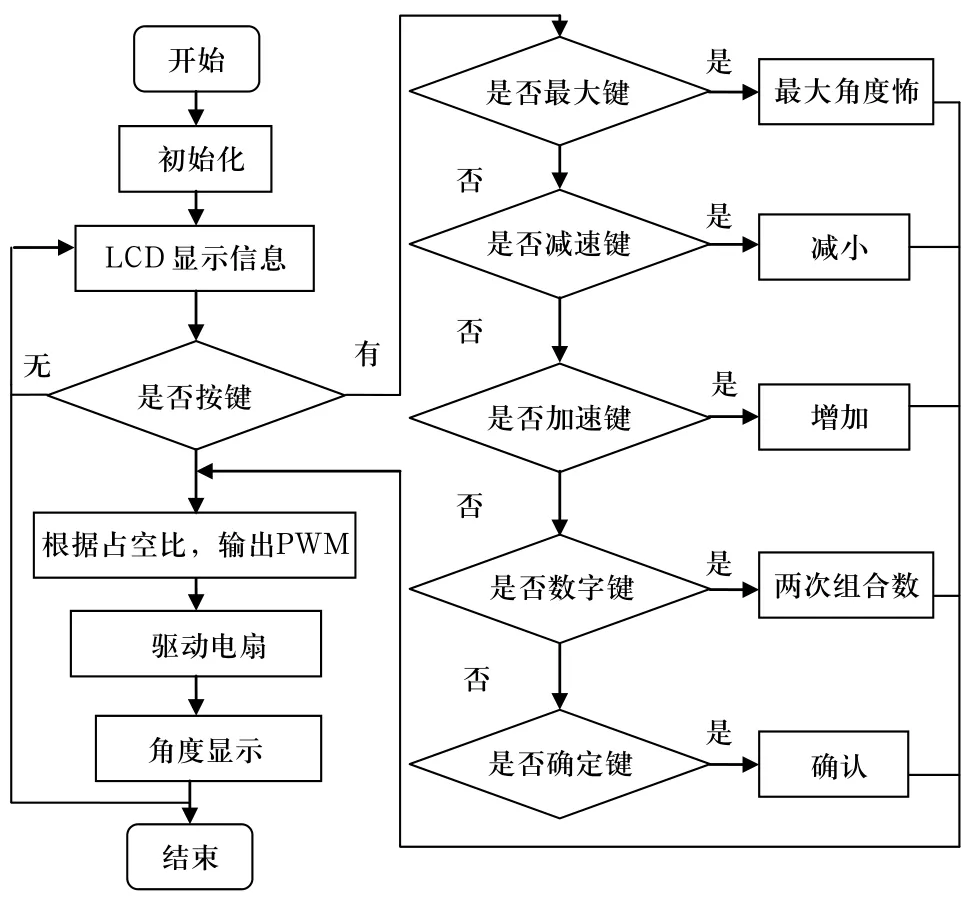
图6 程序流程图
4 系统测试
根据方案,我们焊接出了帆板控制系统的电路板,我们利用量角器、直尺、秒表、三角板等工具做了一系列的实验。
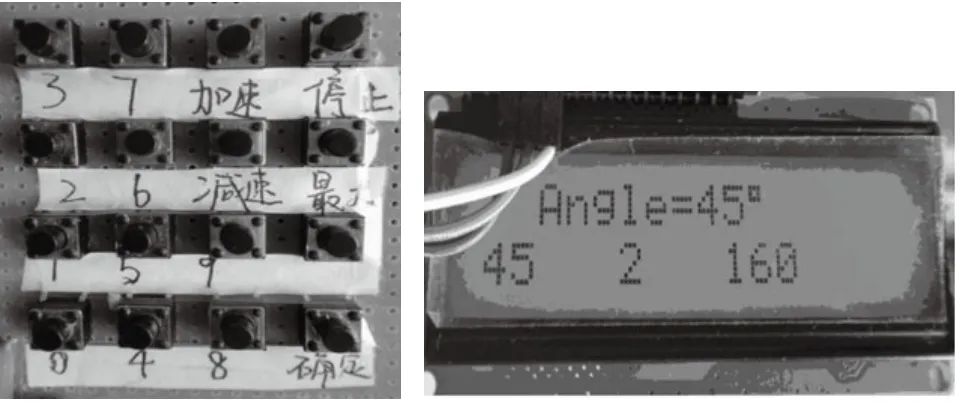
图7 键盘布局图 图8 帆板45度LCD显示信息
我们把风扇固定在距离帆板10cm的位置,对系统上电后,系统处于待机状态。系统的键盘布局如图7所示,此时按下“最大”键,风扇处于最大风速,帆板被风扇吹起,则帆板处于最大角度,LCD上显示相关信息;此时若按下键盘的“增大”、“减小”按键,风扇的转速会增大或减小,帆板的角度也会增大或减小,可以满足在0-60度范围内变化。经测试,角度误差在2度以内,见表1所示。键盘上还设置了数字键,用户可以自主设置要求帆板达到的角度,假设我们要预置45度,则按下4和5键,再按下确定键,则帆板可以很快稳定在45度附近,并且发出声光报警供用户检测,LCD显示如图8所示。LCD两行显示,第一行为帆板当前的倾角,第二行为预置角度、时间、占空比等信息。经测试,达到设定值的时间在4秒以内,如表2所示。

表1 帆板增大减小的角度
本系统实现了实时显示帆板角度的基本要求,但也不可避免地存在一些误差。我们对误差进行了分析,有多种因素造成误差。例如帆板支架的不稳定性,造成了角度的不稳定;倾度传感器的初始角度很难保证绝对水平以及公式的近似计算带来的误差。
5 结论
本系统利用SCA60C 倾角传感器检测帆板的角度,经过A/D 转换后输送给单片机处理显示;并且可以通过键盘来增大、减小、设置帆板的角度,完全实现了系统设计的要求。系统测量精度高,绝对误差小于2 度;预置角度方便,4 秒内就可以达到设定值。在角度自动调整中,充分利用单片机和传感器技术,可以实现物体的精确角度定位,在实际生活领域有非常重要的实际应用。
[1] 张晓静, 站智涛. 基于倾角传感器设计的帆船姿态仪[J].单片机与嵌入式系统应用. 2008(5): 54-55
[2] 郭志勇. 单片机应用技术项目教程[M]. 中国水利水电出版社. 2011.1
[3] 宋健. 基于L298的直流电动机PWM调速器[J]. 潍坊学院学报. 2004(4): 87-88.
[4] 全国电子设计竞赛获奖作品选编[M]. 北京理工大学出版社, 2007.
猜你喜欢
消费电子(2022年6期)2022-08-25 09:44:42
新教育时代电子杂志(教师版)(2022年31期)2022-02-09 05:40:37
趣味(作文与阅读)(2021年5期)2021-08-19 02:48:46
中国(俄文)(2019年6期)2019-11-22 14:41:58
电脑报(2019年40期)2019-09-10 07:22:44
故事大王(2017年4期)2017-05-08 07:53:40
现代工业经济和信息化(2016年4期)2016-05-17 05:35:45
汽车维护与修理(2016年3期)2016-02-28 13:16:56
红蜻蜓·低年级(2015年7期)2016-02-02 11:01:20
空间控制技术与应用(2015年4期)2015-06-05 12:22:40
